











Robotic systems rely on precise logic to navigate environments, manipulate objects, and respond to dynamic stimuli. At the core of this decision-making architecture lies the Finite State Machine (FSM), often visualized using UML State Machine Diagrams. While powerful, these diagrams can introduce critical vulnerabilities during implementation. One of the most persistent challenges engineers face is the infinite loop—a condition where the system remains trapped in a specific state or cycle, unable to progress to subsequent tasks.
This guide provides a deep dive into identifying, diagnosing, and resolving infinite loops within robotics control logic. We will explore the structural causes, the symptoms observable in hardware, and systematic approaches to debugging without relying on proprietary tools. The goal is to ensure your robotic systems remain responsive, efficient, and reliable.
1. Understanding the Foundation of State Machines in Robotics 🏗️
Before troubleshooting, it is essential to understand the mechanics of the system you are analyzing. A state machine is a model of computation consisting of a finite number of states, transitions between those states, and actions.
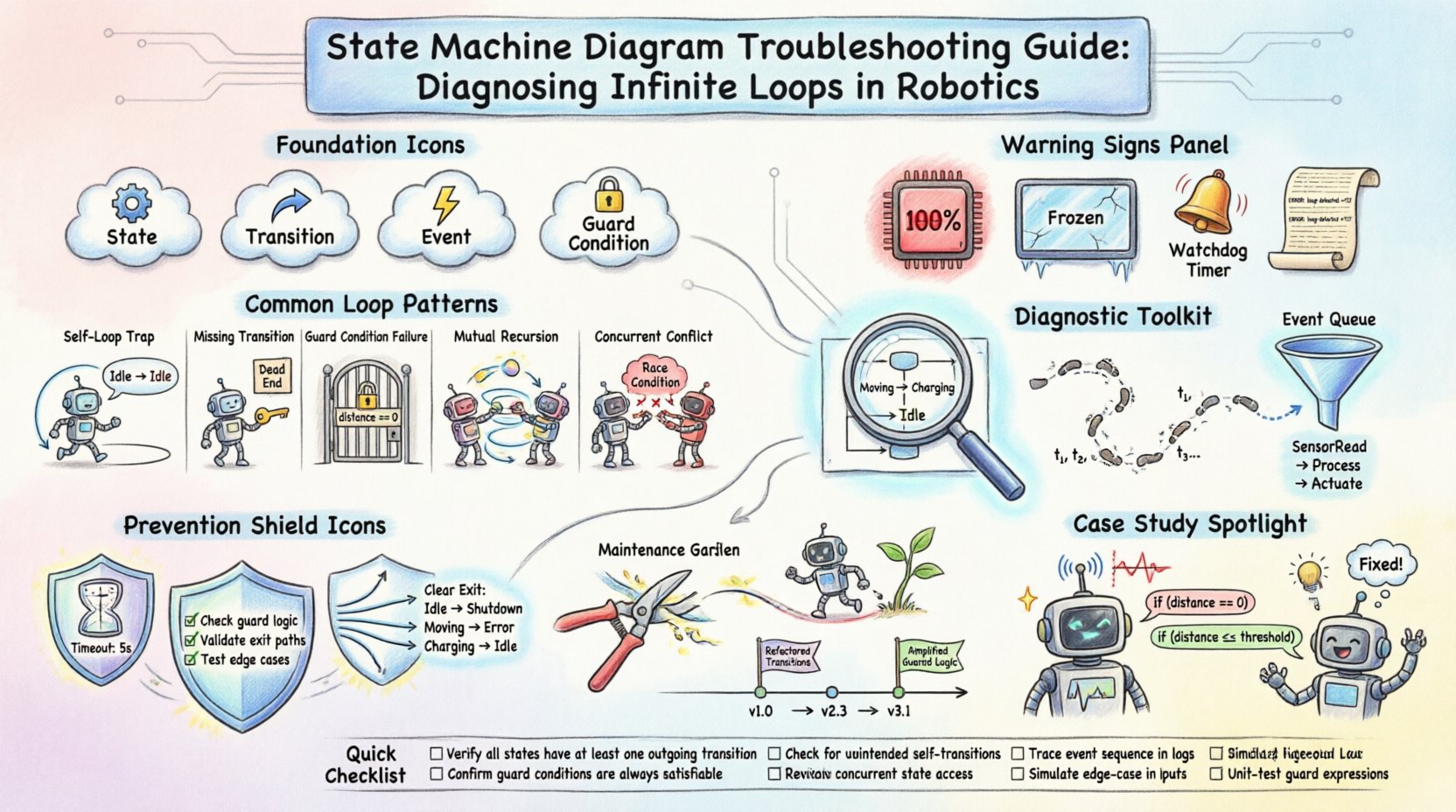
- State: A condition or situation during which the system performs some action or waits for a specific event. Examples include Idle, Moving, Charging, or Error.
- Transition: The movement from one state to another triggered by an event or condition.
- Event: A signal or occurrence that triggers a transition. This could be a sensor reading, a timer expiration, or a user command.
- Guard Condition: A boolean expression that must be true for a transition to occur.
- Entry/Exit Actions: Operations performed when entering or leaving a specific state.
In robotics, these diagrams map directly to embedded control loops. When a robot fails to move from a Searching state to a Grasping state, the diagram is likely describing a path that cannot be completed under current conditions.
2. Recognizing the Signs of an Infinite Loop 🚨
Diagnosing an issue begins with observation. Infinite loops in state machine logic rarely announce themselves with error messages. Instead, they manifest as behavioral anomalies. Here are the primary indicators that your state machine is stuck:
- High CPU Utilization: If the processor is running at 90-100% capacity without performing meaningful work, it is likely spinning in a tight loop checking a condition that never becomes true.
- Unresponsive Interface: Buttons, touchscreens, or remote commands fail to elicit a response because the main control thread is occupied with the loop.
- Watchdog Timer Expirations: Most embedded systems include watchdog timers that reset the device if the software hangs. Frequent resets often point to a logic deadlock.
- Stalled Sensor Data: New sensor inputs are ignored because the state machine is not processing the event queue.
- Log Clutter: Debug logs show the same state being entered and exited repeatedly, or a single state being checked continuously.
3. Common Patterns Leading to Stalled Logic 🔄
Understanding the specific structural flaws that cause infinite loops helps narrow down the search area. Below is a table detailing common patterns found in UML state machine diagrams for robotics.
| Pattern Name | Description | Typical Consequence |
|---|---|---|
| Self-Loop Trap | A transition exists from a state back to itself with no exit condition. | System remains in this state indefinitely unless an external reset occurs. |
| Missing Transition | A state requires a transition to proceed, but no valid path exists for the current input. | The system waits forever for an event that never arrives. |
| Guard Condition Failure | A boolean check (e.g., if (battery > 20%)) is never satisfied due to logic errors. |
Transitions are blocked, forcing the system to stay in the current state. |
| Mutual Recursion | State A transitions to State B, which immediately transitions back to State A. | Rapid cycling that consumes resources without achieving progress. |
| Concurrent State Conflict | Orthogonal regions in the state machine contradict each other’s requirements. | The system waits for a condition that one region sets and the other unsets. |
4. Step-by-Step Diagnostic Procedures 🔍
Once symptoms are identified, systematic testing is required. Do not rely on guesswork. Follow this structured approach to isolate the fault.
4.1 Visual Inspection of the Diagram
Start with the source of truth: the UML diagram itself. Look for:
- States with no outgoing transitions except for self-loops.
- Events that are defined but have no corresponding transition targets.
- Complex nested states that may obscure the flow of control.
- History states (Deep vs. Shallow) that might restore the wrong context.
4.2 Trace Execution Flow
Use logging or debugging hooks to trace the path of execution. Insert breakpoints or log statements at the entry and exit of every state.
- Entry Logging: Record when a state is entered. If a state is entered 50 times in a second, you have identified the loop.
- Event Logging: Record every event received by the state machine. Verify if the expected trigger is actually reaching the logic.
- Variable State: Monitor variables involved in guard conditions. Determine if they are being updated correctly.
4.3 Isolate the Event Queue
In many robotics architectures, events are queued. An infinite loop often occurs because the queue is not being drained.
- Check if the event processing loop has a timeout mechanism.
- Verify that high-priority events do not starve lower-priority transitions.
- Ensure that the state machine is not blocking on a non-blocking call that actually blocks.
5. Implementation Strategies to Prevent Deadlocks 🛡️
Prevention is more effective than cure. By adhering to specific design principles, you can minimize the risk of infinite loops in future iterations.
5.1 Define Clear Termination Conditions
Every state should have a defined path to exit. Avoid states that serve as “black holes.” If a robot enters a Calibration state, there must be a timeout or a success condition that forces it to Ready.
5.2 Utilize Timeout Mechanisms
Implement watchdog timers within the state machine logic itself. If a state persists longer than a predefined threshold, the system should trigger a fallback state or reset sequence.
5.3 Simplify Guard Conditions
Complex boolean expressions are prone to errors. Break down complex guards into named variables or intermediate functions. This makes the logic easier to read and test.
- Bad:
if (sensorA > 5 && sensorB < 10 && !motorLocked && temp < 60) - Good:
if (isTargetReached() && isMotorSafe() && isTempNormal())
5.4 Implement State Hierarchy Carefully
While sub-states reduce diagram complexity, they can introduce ambiguity regarding where a transition originates. Ensure that transitions from parent states do not conflict with transitions defined in child states.
6. Case Study: Navigation Logic Failure 📍
Consider a scenario involving an autonomous mobile robot (AMR). The robot is tasked with navigating from Point A to Point B. The state machine includes states for Standby, PathPlanning, Driving, and ObstacleAvoidance.
The Issue: The robot enters the Driving state but never transitions to PathPlanning upon reaching the destination. It continues to drive in circles.
The Analysis:
- Logs show the robot remains in Driving.
- The transition to PathPlanning is triggered by an event
ArrivedAtGoal. - However, the GPS sensor is providing coordinates that are slightly off due to signal drift.
- The guard condition for the transition was
if (distanceToGoal == 0).
The Fix: Floating-point comparisons using equality are risky. The guard condition was changed to if (distanceToGoal <= threshold). Additionally, a timeout state was added to the Driving state. If the robot does not reach the goal within 60 seconds, it transitions to ObstacleAvoidance to re-evaluate the path.
7. Maintaining Diagram Health Over Time 📉
State machine diagrams are living documents. As requirements change, the logic evolves. Without maintenance, technical debt accumulates in the form of logic traps.
- Regular Reviews: Conduct code reviews specifically focused on state transitions. Ask: “Is there a way out of this state?”
- Unit Testing: Write tests for every state transition. Ensure that expected events trigger the correct outcomes.
- Version Control: Keep a history of diagram changes. If a new bug appears, you can revert to the last known stable version.
- Documentation: Comment the diagram with reasons for complex transitions. Future engineers will thank you.
8. Advanced Debugging Techniques for Complex Systems 🔬
For multi-robot systems or highly concurrent architectures, standard debugging may fall short. Consider these advanced methods.
8.1 State Snapshotting
Periodically save the entire state of the machine to a log file. This allows you to replay the sequence of events leading up to a hang. It is particularly useful for reproducing intermittent bugs.
8.2 Stress Testing
Run the system under maximum load. Send events faster than the processor can typically handle. This can reveal race conditions that lead to infinite loops, where the state machine processes an event, changes state, but misses the next event in the queue.
8.3 Formal Verification
For critical safety systems, use formal methods to mathematically prove that the state machine cannot enter a deadlock state. While time-consuming, this guarantees logical correctness.
9. The Role of Human Factors in Loop Detection 👥
Technology is only one part of the equation. Human error often introduces infinite loops. Developers may assume a sensor works perfectly, or they may misinterpret the behavior of a third-party module.
- Assumption Validation: Never assume a condition is met. Always verify input data before triggering transitions.
- Team Communication: Ensure the control engineer understands the physical constraints of the robot. A software state might be valid, but a physical state might not be achievable.
- Training: Educate the team on state machine theory. Misunderstanding the difference between a transition and an action is a common source of bugs.
10. Summary of Diagnostic Checklist ✅
Use this checklist during your next troubleshooting session.
- ☐ Is CPU usage abnormally high?
- ☐ Does the watchdog timer reset the system frequently?
- ☐ Are there self-loops without exit conditions?
- ☐ Do guard conditions rely on floating-point equality?
- ☐ Is the event queue being drained?
- ☐ Are there states with no outgoing transitions?
- ☐ Have timeouts been implemented for long-running states?
- ☐ Is the diagram updated to match the current codebase?
By systematically applying these principles, you can maintain robust state machine architectures. The complexity of robotics demands precision, and a well-debugged state machine is the backbone of reliable autonomy. Focus on clarity, enforce strict exit conditions, and validate logic against physical reality.
