











Projetar sistemas de controle confiáveis para robótica exige precisão. Um único erro lógico no firmware pode parar as operações ou causar danos ao hardware. As máquinas de estado fornecem uma abordagem estruturada para gerenciar comportamentos complexos. Quando implementadas corretamente, elas aumentam a previsibilidade e a manutenibilidade. No entanto, um projeto inadequado introduz riscos como travamentos. Essas condições congelam o sistema, impedindo qualquer progresso posterior.
Este guia explora as práticas recomendadas para diagramas de máquinas de estado UML. O foco está em contextos de firmware de robótica. Analisamos como estruturar transições, gerenciar recursos e lidar com concorrência. O objetivo é alcançar robustez sem complexidade desnecessária.
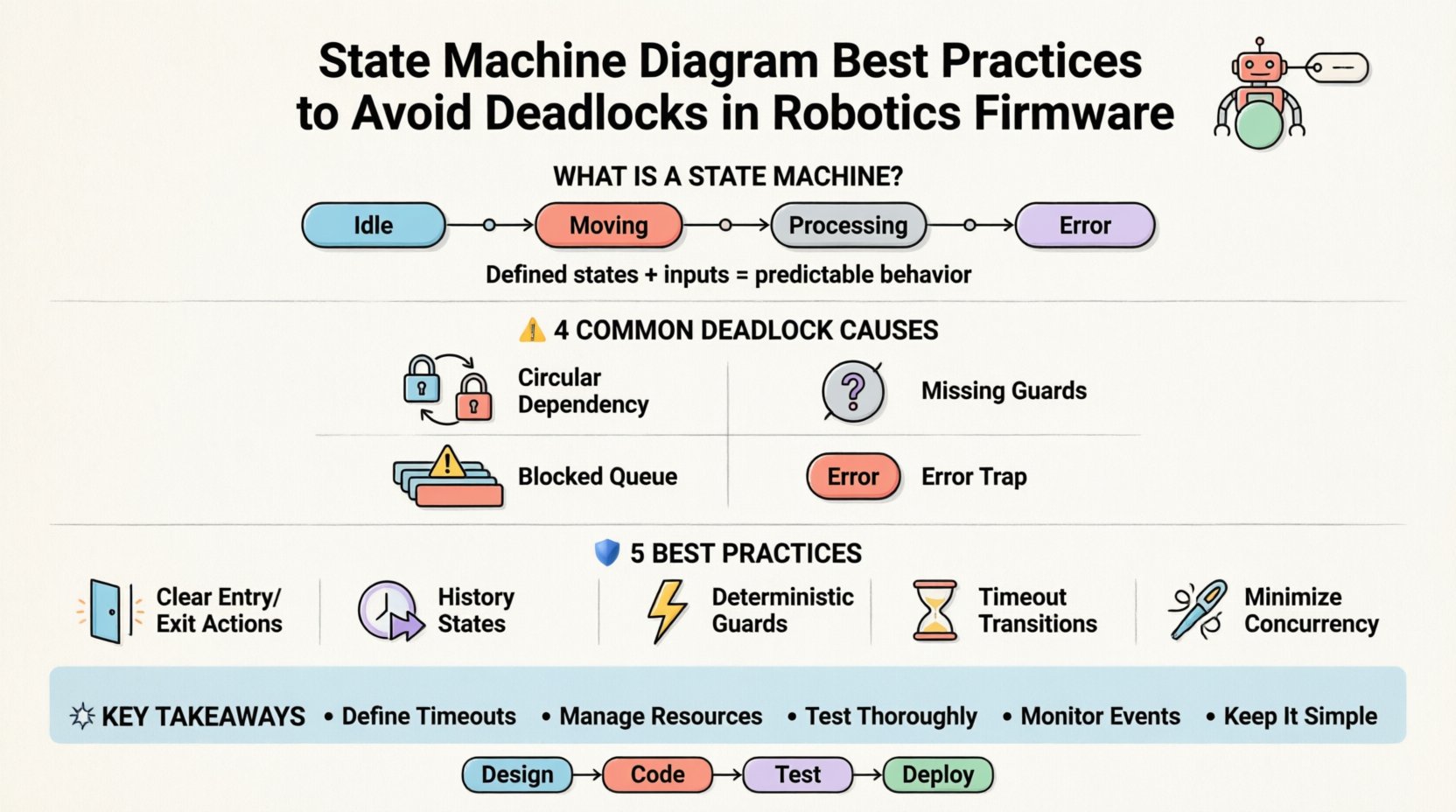
🧠 Compreendendo máquinas de estado na robótica
Uma máquina de estado é um modelo matemático de computação. Ela descreve um sistema que se move entre estados definidos com base em entradas. Na robótica, essas entradas geralmente vêm de sensores, comandos do usuário ou temporizadores internos. Os estados representam modos operacionais específicos, como “Inativo”, “Movendo”, “Processando” ou “Erro”.
Por que usar máquinas de estado?
- Clareza:Diagramas visuais mapeiam o fluxo lógico de forma clara.
- Completude:Garante que todas as situações sejam consideradas.
- Manutenibilidade:As mudanças são localizadas em estados ou transições específicas.
- Depuração:Mais fácil rastrear caminhos de execução durante falhas.
No entanto, sistemas embarcados têm limitações. A memória é limitada. A potência de processamento é finita. O tempo é crítico. Um travamento ocorre quando dois ou mais estados aguardam indefinidamente um ao outro. Isso geralmente acontece devido a dependências circulares ou contenção de recursos.
⚠️ Causas comuns de travamentos no firmware
Antes de aplicar correções, é necessário entender as causas raiz. Os travamentos em firmware de robótica geralmente surgem da forma como os eventos são enfileirados e como os recursos são adquiridos.
1. Dependência circular de recursos
O estado A espera por um recurso detido pelo estado B. O estado B espera por um recurso detido pelo estado A. Nenhum pode prosseguir. Isso é clássico em arquiteturas multi-threaded ou multi-processo.
2. Guardas de transição ausentes
Se uma condição de transição nunca for atendida, o sistema permanece em um estado para sempre. Isso parece um travamento para o operador, embora tecnicamente seja uma parada lógica.
3. Filas de eventos bloqueantes
Eventos de alta prioridade ficam presos atrás de eventos de baixa prioridade. Se a fila se encher, novos eventos são descartados ou o sistema fica bloqueado esperando espaço.
4. Tratamento inadequado de erros
Quando ocorre um erro, a máquina transita para um estado “Erro”. Se esse estado não tiver uma condição de saída definida, o robô deixa de responder a todas as entradas.
🛡️ Práticas recomendadas para o design de diagramas
Projetar o diagrama é a primeira linha de defesa. O modelo visual deve ser traduzido em código sem introduzir erros lógicos.
1. Defina ações claras de entrada e saída
Cada estado deve ter comportamentos definidos ao entrar e sair. Isso garante que os recursos sejam gerenciados de forma consistente.
- Ações de entrada: Inicialize variáveis, inicie cronômetros ou habilite sensores.
- Ações de saída: Pare atuadores, libere travas ou registre dados.
- Efeito: Ações realizadas imediatamente ao ocorrer uma transição.
Exemplo:
- Entrando em Movimento estado: Habilite o driver do motor.
- Saindo de Movimento estado: Desabilite o driver do motor.
2. Use estados de histórico para submáquinas complexas
Robôs complexos possuem comportamentos aninhados. Regiões ortogonais permitem que processos independentes rodem simultaneamente. Estados de histórico lembram a última subestação ativa.
- Histórico profundo: Retorna ao estado ativo mais profundo.
- Histórico superficial: Retorna ao estado mais recentemente entrado nesse nível.
Isso evita que o sistema volte para um estado padrão toda vez que uma submáquina for reentrada, reduzindo a latência e condições de corrida potenciais.
3. As condições de guarda devem ser determinísticas
As guardas decidem se uma transição ocorre. Elas devem ser avaliadas rapidamente e de forma consistente. Evite cálculos complexos dentro das condições de guarda.
- Ruim: Verificando uma longa lista de valores de sensores com loops aninhados.
- Bom: Verificando uma bandeira booleana definida por uma tarefa em segundo plano.
4. Implemente transições com tempo limite
Nenhum estado deve esperar indefinidamente por um evento. Um tempo limite garante o progresso.
- Defina uma duração máxima para um estado.
- Defina uma transição em caso de tempo limite para um estado de erro ou ocioso.
- Isso evita travamentos devido à latência da rede ou atrasos em sensores.
5. Minimize Regiões Concorrentes
Regiões concorrentes (estados ortogonais) são poderosas, mas arriscadas. Mais regiões significam mais potencial para erros de sincronização.
- Mantenha as regiões independentes sempre que possível.
- Use a transmissão de eventos com cuidado.
- Evite estados mutáveis compartilhados entre regiões concorrentes.
🔄 Tratamento de Transições e Eventos
O movimento entre estados é onde ocorrem a maioria dos erros lógicos. A ordem de processamento de eventos é significativamente importante.
Priorização de Eventos
Nem todos os eventos são iguais. Um evento de falha de hardware deve sobrescrever um evento de atualização de status. Defina níveis de prioridade no diagrama.
Gatilhos de Transição
Garanta que cada estado tenha uma resposta definida para cada evento relevante. Se um evento for ignorado, será tratado como uma operação sem efeito. Se um evento for inesperado, pode provocar um comportamento indefinido.
Transições Auto-Referentes
Usar uma transição auto-referente (permanecer no mesmo estado) pode ser útil para lidar com repetições ou laços. No entanto, evite laços infinitos dentro de uma transição auto-referente sem uma condição de saída.
📊 Comparação de Estratégias de Transição
| Estratégia | Vantagens | Desvantagens | Risco de Vida |
|---|---|---|---|
| Execução Imediata | Tempo de resposta mais rápido | Mais difícil de interromper | Baixo |
| Execução Adiada | Permite preempção | Latência mais alta | Médio |
| Fila de Eventos | Lida com picos | Custo de memória | Alto (se a fila bloquear) |
| Acionado por Interrupções | Responsividade em Tempo Real | Sincronização Complexa | Médio |
🧩 Gerenciamento de Recursos e Blocos
O firmware frequentemente interage com periféricos de hardware. Esses recursos precisam de acesso exclusivo para evitar corrupção.
Alocação de Recursos
Aplicar regras rigorosas para adquirir blocos.
- Adquira blocos em uma ordem consistente em todos os estados.
- Libere os blocos imediatamente após o uso.
- Nunca mantenha um bloco enquanto aguarda outro recurso.
Matriz de Prevenção de Vida Longa
Use uma matriz para rastrear dependências de recursos.
- Liste todos os estados.
- Liste todos os recursos.
- Marque quais estados detêm quais recursos.
- Identifique ciclos no gráfico de dependência.
Se um ciclo existir, redesenhe o fluxo de estado para quebrá-lo.
🧪 Testes e Validação
Projetar o diagrama é apenas metade do trabalho. A verificação garante que a implementação corresponda ao modelo.
Testes com Modelo no Laço
Execute a lógica da máquina de estados em um ambiente de simulação antes de implantar no hardware. Isso permite testes de estresse sem correr riscos com componentes físicos.
Testes com Hardware no Laço
Conecte o firmware a um ambiente físico simulado. Verifique as restrições de tempo e os ciclos de retorno de sensores.
Testes de Fuzz
Injete eventos aleatórios no sistema. Observe se a máquina de estados trata entradas inesperadas de forma adequada ou entra em falha.
Registro e Rastreamento
Implemente registro detalhado para transições de estado.
- Registre horários de entrada e saída.
- Registre gatilhos de eventos e resultados de transições.
- Registre a aquisição e liberação de recursos.
Esses dados são vitais para diagnosticar travamentos intermitentes que ocorrem apenas sob condições específicas.
🔍 Analisando Cenários Específicos de Travar
Vamos analisar exemplos concretos de onde as coisas dão errado no firmware de robótica.
Cenário 1: A Espera do Sensor
Estado: Esperando dados do Lidar.
Condição: Transição apenas em “DataReceived”.
Problema: Se o sensor falhar em enviar dados, o estado nunca sairá. O robô fica travado.
Solução: Adicione uma transição com tempo limite. Se “DataReceived” não chegar dentro de 5 segundos, faça a transição para o estado “SensorError”.
Cenário 2: O Travar do Motor
Estado: Carregando a Bateria.
Condição: Transição para “Idle” quando BatteryFull.
Problema: O evento “BatteryFull” é gerado por um circuito de carregamento. O processador principal nunca consulta o registro de status.
Solução: Certifique-se de que o manipulador de interrupção envie o evento para a fila da máquina de estados. Não dependa de verificação em um loop ocupado.
Cenário 3: A Chamada Aninhada
Estado: Navegação.
Condição: Chama a função secundária “PathPlanning”.
Problema: “PathPlanning” bloqueia por 10 segundos. A máquina de estados não pode processar outros eventos durante esse tempo.
Solução:Desloque tarefas longas para uma thread em segundo plano. Envie um evento “PlanningComplete” para a máquina de estados principal.
🔧 Padrões de Implementação de Código
O diagrama deve mapear de forma clara para o código. Existem vários padrões para alcançar isso.
Padrão Switch-Case
Use um loop principal que faça switch na variável de estado atual. Isso é simples, mas pode se tornar desajeitado com muitos estados.
- Vantagens: Fácil de ler para máquinas simples.
- Desvantagens: Difícil de refatorar, propenso a erros de digitação nos rótulos de case.
Padrão de Objeto de Estado
Cada estado é uma classe que implementa uma interface comum. O loop principal chama o método handle do estado atual.
- Vantagens: Encapsula a lógica, mais fácil de estender.
- Desvantagens: Mais sobrecarga, maior uso de memória.
Abordagem Baseada em Tabela
Armazene as transições em uma tabela de dados. O motor consulta o próximo estado com base no estado atual e no evento.
- Vantagens: Altamente configurável, separa dados da lógica.
- Desvantagens: Depuração pode ser mais difícil, exige um motor robusto.
🛠️ Otimização para Restrições de Embutido
Firmware de robótica geralmente roda em microcontroladores com RAM e CPU limitados.
Gerenciamento de Memória
- Evite alocação dinâmica para objetos de estado durante a execução.
- Aloque antecipadamente buffers de eventos na inicialização.
- Use buffers de tamanho fixo para strings e logs.
Utilização da CPU
- Mantenha as transições de estado atômicas.
- Minimize o tempo gasto dentro de um manipulador de transição.
- Use interrupções apenas para eventos de hardware, não para lógica de software.
📈 Manutenção e Evolução
Robôs evoluem. Requisitos mudam. A máquina de estados deve se adaptar.
Controle de Versão
Mantenha os diagramas de estado no controle de versão junto com o código-fonte. Isso garante que o modelo corresponda à implementação.
Documentação
Anote o diagrama com comentários explicando a lógica complexa. Não dependa apenas do diagrama.
Refatoração
Ao adicionar novas funcionalidades, revise os estados existentes. Certifique-se de que a nova lógica não introduza novos caminhos de bloqueio.
🚀 Resumo dos Principais Aprendizados
Construir firmware confiável para robótica exige um design disciplinado. Máquinas de estado são uma ferramenta poderosa, mas exigem uma gestão cuidadosa de eventos e recursos.
- Defina timeouts: Nunca deixe um estado esperar para sempre.
- Gerencie Recursos: Evite dependências circulares.
- Teste Cuidadosamente: Use simulação e fuzzing.
- Monitore Eventos: Certifique-se de que todas as entradas sejam processadas.
- Mantenha Simples: Reduza a complexidade sempre que possível.
Ao seguir estas práticas, os desenvolvedores podem criar sistemas resilientes e previsíveis. O foco permanece na funcionalidade e na segurança. Evitar bloqueios garante que o robô complete sua missão sem interrupções.
🔮 Considerações Futuras
À medida que os sistemas robóticos se tornam mais autônomos, as máquinas de estado precisarão se integrar a camadas superiores de tomada de decisões. Modelos de aprendizado de máquina podem sugerir ações, mas a máquina de estado deve permanecer como o limite de segurança.
- Garanta que as interfaces entre a IA e a lógica de estado sejam bem definidas.
- Permita uma degradação suave caso a camada de IA falhe.
- Continue priorizando o comportamento determinístico sobre resultados probabilísticos em caminhos críticos.
A base de qualquer sistema robusto é uma compreensão clara de seus estados operacionais. Invista tempo na fase de design. Um diagrama bem estruturado traz benefícios no campo.
📝 Observações Finais sobre a Implementação
Lembre-se de que o diagrama é um contrato. Ele define como o sistema se comporta em todas as condições. Trate-o como tal. Revise com colegas. Desafie as suposições. Teste os casos extremos. Essa diligência é o que separa protótipos funcionais de firmware pronto para produção.
Quando ocorre um bloqueio, não assuma que é uma falha de hardware. Muitas vezes é uma falha de lógica. Revise as transições de estado. Verifique os guardas. Confirme o fluxo de eventos. A solução está no design.
Adotar estas práticas recomendadas leva a sistemas mais fáceis de depurar, mais seguros de operar e mais eficientes de manter. O caminho para a confiabilidade é pavimentado com estados claros e transições definidas.
