











Проектирование надежных систем управления для робототехники требует точности. Один логический сбой в прошивке может остановить работу или привести к повреждению оборудования. Конечные автоматы обеспечивают структурированный подход к управлению сложным поведением. При правильной реализации они повышают предсказуемость и поддерживаемость. Однако неправильный дизайн вводит риски, такие как взаимоблокировки. Эти состояния останавливают систему, не позволяя ей двигаться дальше.
В этом руководстве рассматриваются лучшие практики диаграмм конечных автоматов UML. Основное внимание уделяется контекстам прошивки робототехники. Мы изучаем, как структурировать переходы, управлять ресурсами и обрабатывать параллелизм. Цель — надежность без избыточной сложности.
🧠 Понимание конечных автоматов в робототехнике
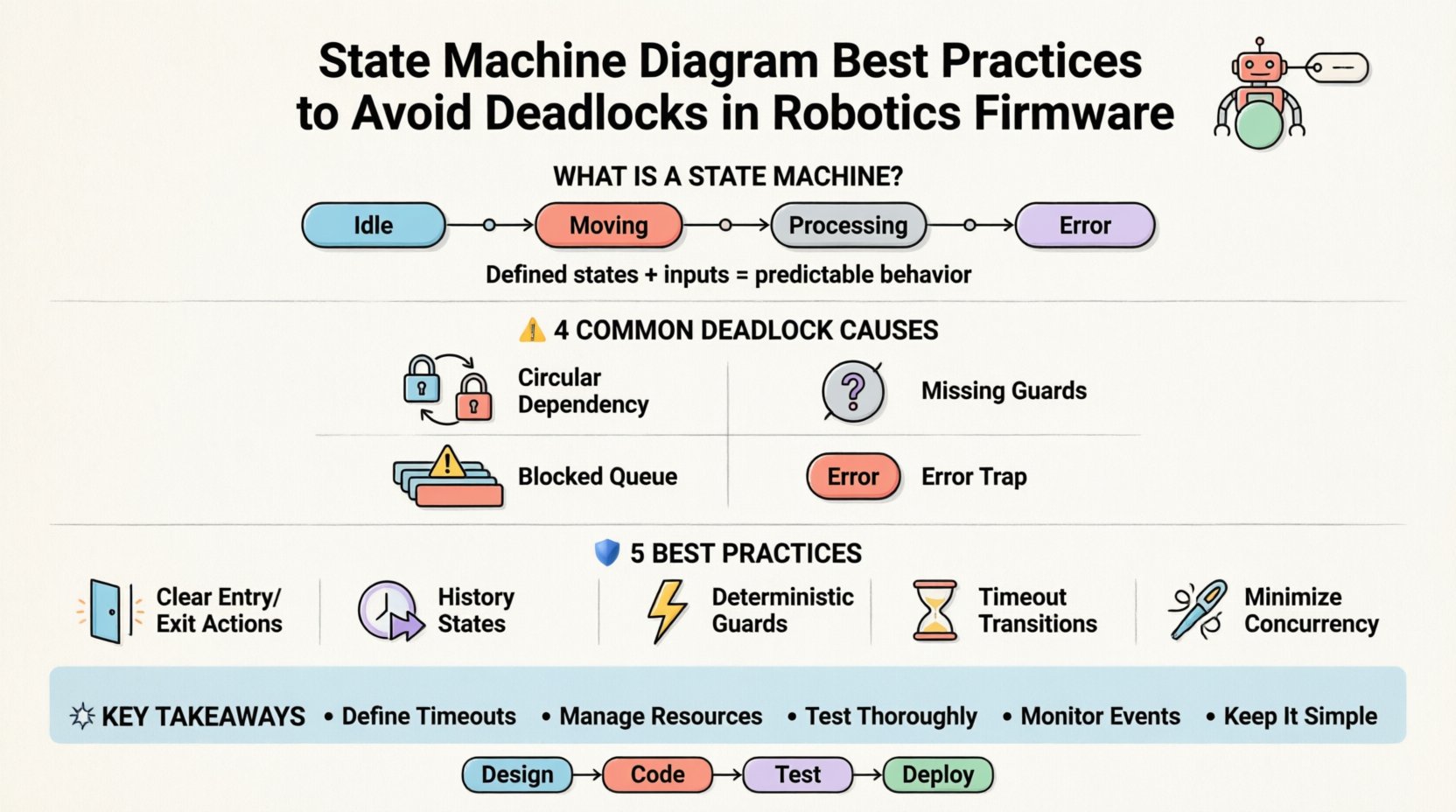
Конечный автомат — это математическая модель вычислений. Он описывает систему, которая переходит между определёнными состояниями в зависимости от входных данных. В робототехнике эти входные данные часто поступают от датчиков, команд пользователя или внутренних таймеров. Состояния представляют конкретные режимы работы, такие как «Пауза», «Движение», «Обработка» или «Ошибка».
Зачем использовать конечные автоматы?
- Чёткость:Визуальные диаграммы чётко отображают логику выполнения.
- Полнота:Обеспечивает учёт всех возможных сценариев.
- Поддерживаемость:Изменения локализованы в конкретных состояниях или переходах.
- Отладка:Проще отслеживать пути выполнения при сбоях.
Однако встраиваемые системы имеют ограничения. Память ограничена. Вычислительная мощность конечна. Время выполнения критично. Взаимоблокировка возникает, когда два или более состояния бесконечно ждут друг друга. Это часто происходит из-за циклических зависимостей или конкуренции за ресурсы.
⚠️ Распространённые причины взаимоблокировок в прошивке
Прежде чем применять исправления, необходимо понять коренные причины. Взаимоблокировки в прошивке робототехники обычно возникают из-за способа очереди событий и приобретения ресурсов.
1. Циклическая зависимость ресурсов
Состояние А ожидает ресурс, удерживаемый состоянием В. Состояние В ожидает ресурс, удерживаемый состоянием А. Ни одно из них не может продолжить работу. Это классическая ситуация в многопоточных или многопроцессных архитектурах.
2. Отсутствующие условия перехода
Если условие перехода никогда не выполняется, система остаётся в состоянии навсегда. Для оператора это выглядит как взаимоблокировка, хотя технически это логическая остановка.
3. Блокирующие очереди событий
События высокого приоритета застревают за событиями низкого приоритета. Если очередь заполнится, новые события будут отброшены или система заблокируется, ожидая освобождения места.
4. Неправильная обработка ошибок
Когда возникает ошибка, машина переходит в состояние «Ошибка». Если в этом состоянии не определено условие выхода, робот перестаёт отвечать на все входные сигналы.
🛡️ Лучшие практики проектирования диаграмм
Проектирование диаграммы — первый уровень защиты. Визуальная модель должна быть переведена в код без введения логических ошибок.
1. Определите чёткие действия при входе и выходе
Каждое состояние должно иметь определённое поведение при входе и выходе. Это обеспечивает последовательное управление ресурсами.
- Действия при входе: Инициализировать переменные, запустить таймеры или включить датчики.
- Действия выхода:Остановить приводы, снять блокировки или записать данные.
- Эффект:Действия, выполняемые немедленно при переходе.
Пример:
- Вход в Движениесостояние: включить драйвер двигателя.
- Выход из Движениесостояние: выключить драйвер двигателя.
2. Используйте состояния истории для сложных подмашин
Сложные роботы имеют вложенные поведения. Ортогональные области позволяют независимым процессам работать одновременно. Состояния истории запоминают последнее активное подсостояние.
- Глубокая история:Возвращается к самому глубокому активному состоянию.
- Поверхностная история:Возвращается к наиболее недавно введённому состоянию на этом уровне.
Это предотвращает сброс системы в состояние по умолчанию каждый раз, когда подмашину снова вводят, снижая задержку и потенциальные гонки состояний.
3. Условия-ограничения должны быть детерминированными
Ограничения определяют, происходит ли переход. Они должны оцениваться быстро и последовательно. Избегайте сложных вычислений внутри условий-ограничений.
- Плохо:Проверка длинного списка значений датчиков с вложенными циклами.
- Хорошо:Проверка булева флага, установленного фоновой задачей.
4. Реализуйте переходы по таймауту
Ни одно состояние не должно бесконечно ждать события. Таймаут гарантирует прогресс.
- Установите максимальную продолжительность состояния.
- Определите переход по таймауту в состояние ошибки или состояния простоя.
- Это предотвращает зависание из-за сетевой задержки или задержки датчиков.
5. Минимизируйте одновременные области
Одновременные области (ортогональные состояния) мощные, но рискованные. Больше областей означает больше потенциальных ошибок синхронизации.
- Держите области независимыми, где это возможно.
- Осторожно используйте широковещательную передачу событий.
- Избегайте общего изменяемого состояния между одновременными областями.
🔄 Обработка переходов и событий
Переходы между состояниями — это то место, где возникает большинство логических ошибок. Порядок обработки событий имеет большое значение.
Приоритизация событий
Не все события равны. Событие сбоя оборудования должно иметь приоритет перед событием обновления статуса. Определите уровни приоритета на диаграмме.
Триггеры переходов
Убедитесь, что каждое состояние имеет определенный ответ на каждое важное событие. Если событие игнорируется, оно считается бездействием. Если событие неожиданно, оно может вызвать неопределённое поведение.
Самопереходы
Использование самоперехода (остановка в том же состоянии) может быть полезным для обработки повторов или циклов. Однако избегайте бесконечных циклов внутри самоперехода без условия выхода.
📊 Сравнение стратегий переходов
| Стратегия | Плюсы | Минусы | Риск взаимоблокировки |
|---|---|---|---|
| Немедленное выполнение | Более быстрое время отклика | Сложнее прервать | Низкий |
| Отложенное выполнение | Позволяет прерывание | Более высокая задержка | Средний |
| Очереди событий | Обрабатывает пиковые нагрузки | Накладные расходы памяти | Высокий (если очередь блокируется) |
| С прерываниями | Реагирование в реальном времени | Сложная синхронизация | Средний |
🧩 Управление ресурсами и блокировками
Прошивка часто взаимодействует с аппаратными периферийными устройствами. Эти ресурсы требуют исключительного доступа, чтобы предотвратить повреждение.
Выделение ресурсов
Применяйте строгие правила при получении блокировок.
- Получайте блокировки в согласованном порядке во всех состояниях.
- Освобождайте блокировки немедленно после использования.
- Никогда не удерживайте блокировку, ожидая другой ресурс.
Матрица предотвращения взаимоблокировки
Используйте матрицу для отслеживания зависимостей ресурсов.
- Перечислите все состояния.
- Перечислите все ресурсы.
- Отметьте, какие состояния удерживают какие ресурсы.
- Определите циклы в графе зависимостей.
Если цикл существует, перепроектируйте поток состояний, чтобы разорвать его.
🧪 Тестирование и валидация
Разработка диаграммы — это только половина работы. Проверка гарантирует, что реализация соответствует модели.
Тестирование с моделью в цикле
Запустите логику конечного автомата в среде моделирования перед развертыванием на аппаратных средствах. Это позволяет проводить нагрузочное тестирование без риска повреждения физических компонентов.
Тестирование с аппаратной частью в цикле
Подключите прошивку к смоделированной физической среде. Проверьте ограничения по времени и циклы обратной связи датчиков.
Фазз-тестирование
Внедряйте случайные события в систему. Наблюдайте, как конечный автомат обрабатывает неожиданные входные данные — корректно ли или происходит сбой.
Ведение журнала и трассировка
Реализуйте детальное ведение журнала переходов состояний.
- Записывайте временные метки входа и выхода.
- Ведите журнал триггеров событий и результатов переходов.
- Ведите журнал получения и освобождения ресурсов.
Эти данные жизненно важны для диагностики случайных взаимоблокировок, которые возникают только при определённых условиях.
🔍 Анализ конкретных сценариев взаимоблокировок
Рассмотрим конкретные примеры, где возникают проблемы в прошивке робототехники.
Сценарий 1: Ожидание данных с датчика
Состояние: Ожидание данных с лидара.
Условие: Переход только при событии «DataReceived».
Проблема: Если датчик не отправляет данные, состояние никогда не завершится. Робот зависнет.
Решение: Добавьте переход по таймауту. Если событие «DataReceived» не поступит в течение 5 секунд, перейдите в состояние «SensorError».
Сценарий 2: Блокировка двигателя
Состояние: Зарядка аккумулятора.
Условие: Переход в состояние «Idle» при достижении BatteryFull.
Проблема: Событие «BatteryFull» генерируется схемой зарядки. Основной процессор никогда не опрашивает регистр состояния.
Решение: Убедитесь, что обработчик прерываний помещает событие в очередь конечного автомата. Не полагайтесь на опрос в цикле с ожиданием.
Сценарий 3: Вложенный вызов
Состояние: Навигация.
Условие: Вызывает вспомогательную функцию «PathPlanning».
Проблема: Функция «PathPlanning» блокирует выполнение на 10 секунд. За это время конечный автомат не может обрабатывать другие события.
Решение: Передайте длительные задачи фоновому потоку. Опубликуйте событие «PlanningComplete» в основной конечной автомат.
🔧 Паттерны реализации кода
Диаграмма должна четко отображаться в коде. Существует несколько паттернов, позволяющих достичь этого.
Паттерн Switch-Case
Используйте основной цикл, переключающийся по текущей переменной состояния. Это просто, но при большом количестве состояний может стать неудобным.
- Плюсы: Легко читать для простых машин.
- Минусы: Сложно рефакторить, подвержен ошибкам в метках case.
Паттерн объекта состояния
Каждое состояние — это класс, реализующий общий интерфейс. Основной цикл вызывает метод handle текущего состояния.
- Плюсы: Инкапсулирует логику, легче расширять.
- Минусы: Более высокая нагрузка, больший расход памяти.
Подход на основе таблицы
Храните переходы в таблице данных. Движок определяет следующее состояние на основе текущего состояния и события.
- Плюсы: Высокая настраиваемость, разделение данных и логики.
- Минусы: Отладка может быть сложнее, требуется надежный движок.
🛠️ Оптимизация для встроенных ограничений
Прошивка робототехники часто работает на микроконтроллерах с ограниченной памятью и процессором.
Управление памятью
- Избегайте динамического выделения памяти для объектов состояния во время выполнения.
- Выделяйте буферы событий заранее при запуске.
- Используйте буферы фиксированного размера для строк и журналов.
Использование процессора
- Держите переходы состояний атомарными.
- Минимизируйте время, проводимое внутри обработчика перехода.
- Используйте прерывания только для аппаратных событий, а не для программной логики.
📈 Обслуживание и эволюция
Роботы эволюционируют. Требования меняются. Конечный автомат должен адаптироваться.
Контроль версий
Храните диаграммы состояний в системе контроля версий вместе с исходным кодом. Это гарантирует, что модель соответствует реализации.
Документация
Прокомментируйте диаграмму, пояснив сложную логику. Не полагайтесь только на диаграмму.
Рефакторинг
При добавлении новых функций проверьте существующие состояния. Убедитесь, что новая логика не вводит новые пути заторов.
🚀 Основные выводы
Создание надежного программного обеспечения для робототехники требует дисциплинированного проектирования. Машины состояний — мощный инструмент, но они требуют тщательного управления событиями и ресурсами.
- Определите тайм-ауты:Никогда не позволяйте состоянию ждать вечно.
- Управляйте ресурсами:Избегайте циклических зависимостей.
- Тщательно протестируйте:Используйте симуляцию и фаззинг.
- Мониторьте события:Убедитесь, что все входные данные обрабатываются.
- Держите всё просто:Снижайте сложность, где это возможно.
Следуя этим практикам, разработчики могут создавать системы, устойчивые к сбоям и предсказуемые. Основное внимание уделяется функциональности и безопасности. Избегание заторов гарантирует, что робот выполнит свою миссию без перерывов.
🔮 Будущие соображения
По мере того как системы робототехники становятся более автономными, машинам состояний потребуется интегрироваться с более высокими уровнями принятия решений. Модели машинного обучения могут предлагать действия, но машина состояний должна оставаться опорой.
- Убедитесь, что интерфейсы между ИИ и логикой состояний чётко определены.
- Предусмотрите плавное снижение производительности при сбое слоя ИИ.
- Продолжайте уделять приоритет детерминированному поведению вместо вероятностных результатов на критических участках.
Основа любой надежной системы — чёткое понимание её рабочих состояний. Вложите время в этап проектирования. Хорошо структурированная диаграмма окупается на практике.
📝 Заключительные замечания по реализации
Помните, что диаграмма — это контракт. Она определяет поведение системы при всех условиях. Относитесь к ней как к таковой. Обсудите её с коллегами. Оспорьте предпосылки. Протестируйте граничные случаи. Такая внимательность отличает рабочие прототипы от готового к эксплуатации программного обеспечения.
Когда возникает затор, не предполагайте, что это аппаратная неисправность. Часто это ошибка логики. Пересмотрите переходы состояний. Проверьте условия. Убедитесь в правильности потока событий. Решение заключается в проектировании.
Применение этих лучших практик приводит к системам, которые проще отлаживать, безопаснее эксплуатировать и эффективнее обслуживать. Путь к надежности лежит через чёткие состояния и определённые переходы.
