











设计可靠的机器人控制系统需要精确性。固件中的一个逻辑错误就可能导致操作停止或造成硬件损坏。状态机为管理复杂行为提供了一种结构化的方法。正确实施时,它们能提高系统的可预测性和可维护性。然而,设计不当会引入死锁等风险。这些情况会使系统冻结,阻止进一步的进展。
本指南探讨了UML状态机图的最佳实践。重点在于机器人固件的应用场景。我们研究如何设计转换、管理资源以及处理并发问题。目标是在不增加不必要的复杂性的情况下实现系统的鲁棒性。
🧠 理解机器人中的状态机
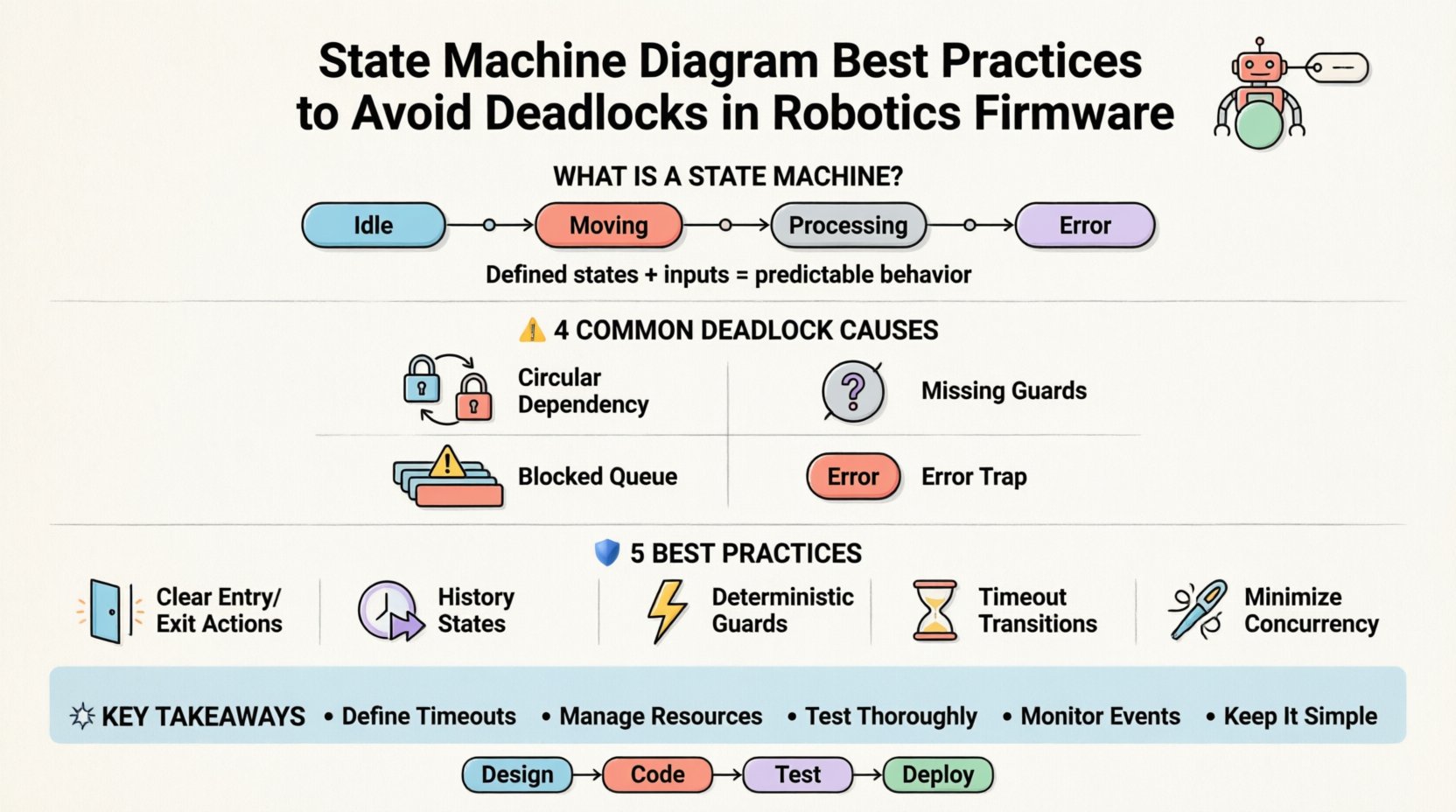
状态机是一种计算的数学模型。它描述了一个根据输入在定义状态之间切换的系统。在机器人领域,这些输入通常来自传感器、用户命令或内部定时器。状态代表特定的操作模式,例如“空闲”、“移动中”、“处理中”或“错误”。
为什么使用状态机?
- 清晰性:视觉图示能清晰地展现逻辑流程。
- 完整性:确保涵盖所有可能的情况。
- 可维护性:更改仅限于特定状态或转换,便于维护。
- 调试:在故障发生时,更容易追踪执行路径。
然而,嵌入式系统存在限制。内存有限,处理能力有限,时间至关重要。当两个或多个状态无限期地相互等待时,就会发生死锁。这通常是由循环依赖或资源竞争引起的。
⚠️ 固件中死锁的常见原因
在应用修复措施之前,必须先理解根本原因。机器人固件中的死锁通常源于事件的排队方式以及资源的获取方式。
1. 循环资源依赖
状态A等待状态B持有的资源,而状态B又等待状态A持有的资源。两者都无法继续执行。这在多线程或多进程架构中很常见。
2. 缺少转换守卫
如果转换条件从未满足,系统将永远停留在某个状态。对操作员而言,这看起来像死锁,但实际上是一种逻辑停滞。
3. 阻塞事件队列
高优先级事件被低优先级事件阻塞。如果队列已满,新事件将被丢弃,或系统会阻塞等待空间。
4. 错误处理不当
当发生错误时,机器会进入“错误”状态。如果该状态没有定义退出条件,机器人将停止响应所有输入。
🛡️ 图形设计的最佳实践
设计图表是第一道防线。视觉模型必须被准确转换为代码,而不会引入逻辑错误。
1. 明确定义进入和退出动作
每个状态都应在进入和退出时具有明确的行为。这能确保资源得到一致管理。
- 进入动作: 初始化变量,启动计时器,或启用传感器。
- 退出动作: 停止执行器,释放锁,或记录数据。
- 效果: 在状态转换发生时立即执行的动作。
示例:
- 进入 运动 状态:启用电机驱动器。
- 退出 运动 状态:禁用电机驱动器。
2. 为复杂子机使用历史状态
复杂的机器人具有嵌套行为。正交区域允许独立的进程同时运行。历史状态会记住最后激活的子状态。
- 深层历史: 返回到最深层的活动状态。
- 浅层历史: 返回到该层级上最近进入的状态。
这可以防止系统在每次重新进入子机时都重置为默认状态,从而降低延迟和潜在的竞争条件。
3. 保护条件必须是确定性的
保护条件决定转换是否发生。它们必须快速且一致地评估。避免在保护条件中进行复杂的计算。
- 不良: 使用嵌套循环检查一个很长的传感器值列表。
- 良好: 检查由后台任务设置的布尔标志。
4. 实现超时转换
任何状态都不应无限期等待事件。超时可确保进度。
- 为状态设置最大持续时间。
- 定义在超时后转换到错误状态或空闲状态。
- 这可以防止因网络延迟或传感器延迟而卡住。
5. 最小化并发区域
并发区域(正交状态)功能强大但存在风险。区域越多,发生同步错误的可能性就越大。
- 尽可能保持区域之间的独立性。
- 谨慎使用事件广播。
- 避免在并发区域之间共享可变状态。
🔄 处理转换和事件
状态之间的转换是大多数逻辑错误发生的地方。事件处理顺序至关重要。
事件优先级
并非所有事件都同等重要。硬件故障事件必须覆盖状态更新事件。在图中定义优先级级别。
转换触发器
确保每个状态对每个相关事件都有明确的响应。如果忽略某个事件,它将被视为无操作。如果事件出乎意料,可能会引发未定义行为。
自转换
使用自转换(停留在同一状态)有助于处理重试或循环。然而,避免在没有中断条件的情况下在自转换中形成无限循环。
📊 转换策略对比
| 策略 | 优点 | 缺点 | 死锁风险 |
|---|---|---|---|
| 立即执行 | 响应时间更快 | 更难中断 | 低 |
| 延迟执行 | 允许抢占 | 更高的延迟 | 中等 |
| 事件排队 | 可处理突发情况 | 内存开销 | 高(如果队列阻塞) |
| 中断驱动 | 实时响应性 | 复杂的同步 | 中等 |
🧩 资源与锁的管理
固件通常与硬件外设交互。这些资源需要独占访问以防止损坏。
资源分配
对获取锁应用严格的规则。
- 在所有状态中以一致的顺序获取锁。
- 使用后立即释放锁。
- 在等待其他资源时永远不要持有锁。
死锁预防矩阵
使用矩阵来跟踪资源依赖关系。
- 列出所有状态。
- 列出所有资源。
- 标记哪些状态持有哪些资源。
- 识别依赖图中的循环。
如果存在循环,则重新设计状态流程以打破它。
🧪 测试与验证
设计图表只是工作的一半。验证确保实现与模型一致。
模型在环测试
在部署到硬件之前,先在仿真环境中运行状态机逻辑。这可以在不危及物理组件的情况下进行压力测试。
硬件在环测试
将固件连接到模拟的物理环境。验证时序约束和传感器反馈回路。
模糊测试
向系统注入随机事件。观察状态机是否能优雅地处理意外输入,或是否崩溃。
日志记录与追踪
为状态转换实现详细的日志记录。
- 记录进入和退出的时间戳。
- 记录事件触发和转换结果。
- 记录资源的获取和释放。
这些数据对于诊断仅在特定条件下发生的间歇性死锁至关重要。
🔍 分析特定的死锁场景
让我们看看机器人固件中出现问题的具体例子。
场景1:传感器等待
状态: 等待激光雷达数据。
条件: 仅在“DataReceived”时转换。
问题: 如果传感器未能发送数据,该状态将永远不会退出。机器人将冻结。
解决方案: 添加超时转换。如果“DataReceived”在5秒内未到达,则转换到“SensorError”状态。
场景2:电机锁定
状态: 充电电池。
条件: 当电池充满时转换到“空闲”状态。
问题: “BatteryFull”事件由充电电路生成。主处理器从未轮询状态寄存器。
解决方案: 确保中断处理程序将事件发布到状态机队列中。不要依赖忙循环中的轮询。
场景3:嵌套调用
状态: 导航。
条件: 调用子函数“PathPlanning”。
问题: “PathPlanning”会阻塞10秒。在此期间,状态机无法处理其他事件。
解决方案: 将长时间任务移至后台线程。向主状态机发布一个“规划完成”事件。
🔧 编码实现模式
该图必须能清晰地映射到代码。存在多种模式可实现这一点。
Switch-Case 模式
使用一个主循环,根据当前状态变量进行切换。这种方法简单,但状态较多时会变得难以维护。
- 优点:对于简单机器,易于阅读。
- 缺点:难以重构,case 标签容易出现拼写错误。
状态对象模式
每个状态都是实现公共接口的类。主循环调用当前状态的处理方法。
- 优点:封装逻辑,更易于扩展。
- 缺点:开销更大,内存使用更多。
表驱动方法
将转换存储在数据表中。引擎根据当前状态和事件查找下一个状态。
- 优点:高度可配置,数据与逻辑分离。
- 缺点:调试可能更困难,需要一个健壮的引擎。
🛠️ 针对嵌入式约束的优化
机器人固件通常运行在 RAM 和 CPU 资源有限的微控制器上。
内存管理
- 避免在运行时对状态对象进行动态分配。
- 在启动时预先分配事件缓冲区。
- 为字符串和日志使用固定大小的缓冲区。
CPU 利用率
- 保持状态转换的原子性。
- 尽量减少在转换处理程序中花费的时间。
- 仅将中断用于硬件事件,而非软件逻辑。
📈 维护与演进
机器人会不断演进,需求也会变化。状态机必须能够适应。
版本控制
将状态图与源代码一起纳入版本控制。这能确保模型与实现一致。
文档
用注释标注图表,解释复杂的逻辑。不要仅依赖图表。
重构
添加新功能时,检查现有状态。确保新逻辑不会引入新的死锁路径。
🚀 关键要点总结
构建可靠的机器人固件需要有纪律的设计。状态机是一种强大的工具,但需要对事件和资源进行仔细管理。
- 定义超时: 永远不要让某个状态无限等待。
- 管理资源: 避免循环依赖。
- 彻底测试: 使用仿真和模糊测试。
- 监控事件: 确保所有输入都被处理。
- 保持简单: 在可能的情况下减少复杂性。
遵循这些实践,开发者可以创建出具有韧性且可预测的系统。重点始终放在功能性和安全性上。避免死锁可确保机器人在不中断的情况下完成任务。
🔮 未来考量
随着机器人系统变得更加自主,状态机需要与更高级别的决策层集成。机器学习模型可能提出行动建议,但状态机应始终作为安全护栏。
- 确保人工智能与状态逻辑之间的接口定义清晰。
- 如果人工智能层出现故障,应允许系统平稳降级。
- 在关键路径上,继续优先考虑确定性行为而非概率性结果。
任何稳健系统的基础是对其运行状态的清晰理解。应在设计阶段投入时间。一个结构良好的图表在实际应用中会带来回报。
📝 实现的最终建议
请记住,图表是一种契约。它定义了系统在所有条件下的行为方式。应如此对待它。与同事一起审查它。挑战假设。测试边界情况。这种严谨性正是功能原型与可投入生产的固件之间的区别。
当发生死锁时,不要假设是硬件故障。这通常是逻辑缺陷。重新审视状态转换。检查守卫条件。验证事件流程。解决方案在于设计本身。
采用这些最佳实践将带来更易于调试、更安全且更高效维护的系统。通往可靠性的道路由清晰的状态和明确的转换铺就。
