











ロボティクス向け信頼性の高い制御システムを設計するには正確さが求められます。ファームウェア内の単一の論理エラーが動作停止やハードウェア損傷を引き起こす可能性があります。状態機械は複雑な振る舞いを管理するための構造化されたアプローチを提供します。適切に実装された場合、予測可能性と保守性が向上します。しかし、不適切な設計はデッドロックのようなリスクをもたらします。これらの状態ではシステムが凍結し、さらなる進行が不可能になります。
本ガイドはUML状態機械図のベストプラクティスを検討します。焦点はロボティクスファームウェアの文脈にあります。遷移の構造化、リソースの管理、並行処理の扱いについて検討します。目的は、不要な複雑さを避けつつも堅牢性を確保することです。
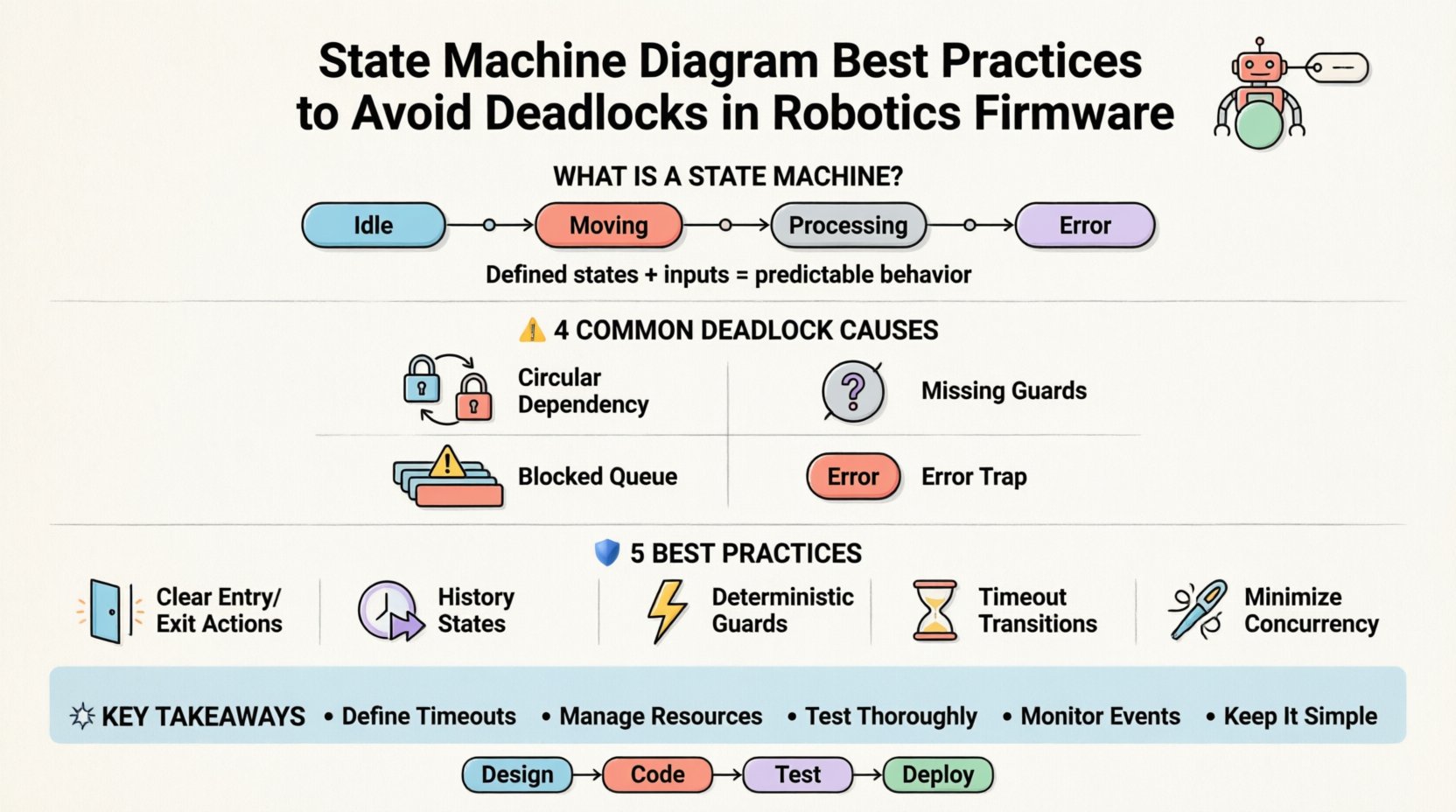
🧠 ロボティクスにおける状態機械の理解
状態機械は計算の数学的モデルです。入力に基づいて定義された状態の間を移動するシステムを記述します。ロボティクスでは、これらの入力はセンサー、ユーザーの命令、または内部タイマーから多くが来ます。状態は「アイドル」、「移動中」、「処理中」、「エラー」などの特定の動作モードを表します。
なぜ状態機械を使うのか?
- 明確さ:視覚的な図は論理フローを明確に示す。
- 包括性:すべてのシナリオが考慮されていることを保証する。
- 保守性:変更は特定の状態や遷移に限定される。
- デバッグ:障害発生時に実行パスを追跡しやすくなる。
しかし、組み込みシステムには制約があります。メモリは限界がある。処理能力も有限である。タイミングは極めて重要です。デッドロックは、2つ以上の状態が互いに無限に待機し合うときに発生します。これは、循環依存関係やリソース競合によってしばしば引き起こされます。
⚠️ ファームウェアにおけるデッドロックの主な原因
修正を適用する前に、根本原因を理解する必要があります。ロボティクスファームウェアにおけるデッドロックは、通常、イベントのキューの扱いやリソースの取得方法に起因します。
1. 循環的リソース依存
状態Aは状態Bが保持するリソースを待機している。状態Bは状態Aが保持するリソースを待機している。どちらも進行できない。これはマルチスレッドまたはマルチプロセスアーキテクチャで典型的な現象である。
2. 遷移ガードの欠如
遷移条件が決して満たされない場合、システムは永遠にその状態に留まる。これはオペレータにとってはデッドロックのように見えるが、技術的には論理的な停止である。
3. ブロッキングイベントキュー
高優先度のイベントが低優先度のイベントの後ろに詰まってしまう。キューが満杯になると、新しいイベントは破棄されたり、スペースを待ってシステムがブロックされる。
4. 不適切なエラー処理
エラーが発生すると、機械は「エラー」状態に遷移する。その状態に明確な終了条件が定義されていない場合、ロボットはすべての入力に応答できなくなる。
🛡️ 図設計のベストプラクティス
図の設計は最初の防御線である。視覚モデルは論理エラーを引き起こさずにコードに変換されなければならない。
1. 明確なエントリおよびエグジットアクションを定義する
すべての状態は、入場時および退場時の明確な振る舞いを持つべきである。これによりリソースの管理が一貫性を持って保証される。
- エントリアクション: 変数の初期化、タイマーの開始、またはセンサーの有効化。
- 終了アクション:アクチュエータの停止、ロックの解放、またはデータの記録。
- 効果:遷移が発生した直後に実行されるアクション。
例:
- 進入時 モーション状態:モータードライバを有効化。
- 退出時 モーション状態:モータードライバを無効化。
2. 複雑なサブマシンには履歴状態を使用する
複雑なロボットにはネストされた動作があります。直交領域により、独立したプロセスを同時に実行できます。履歴状態は、最後にアクティブだったサブ状態を記憶します。
- ディープ履歴:最も深いアクティブな状態に戻ります。
- シャロウ履歴:そのレベルで最も最近に入力された状態に戻ります。
これにより、サブマシンが再入力されるたびにシステムがデフォルト状態にリセットされるのを防ぎ、遅延と潜在的な競合状態を低減します。
3. ガード条件は決定論的でなければならない
ガードは遷移が発生するかどうかを決定します。迅速かつ一貫して評価される必要があります。ガード条件内に複雑な計算を避けること。
- 悪い例:ネストされたループで長いセンサー値のリストをチェックする。
- 良い例:バックグラウンドタスクによって設定されたブールフラグをチェックする。
4. タイムアウト遷移を実装する
どの状態も、イベントを無期限に待ってはならない。タイムアウトにより進行が保証される。
- 状態に最大持続時間を設定する。
- タイムアウト時にエラー状態またはアイドル状態への遷移を定義する。
- これにより、ネットワーク遅延やセンサーの遅延による停止を防ぐ。
5. 同時領域を最小限に抑える
同時領域(直交状態)は強力ですが、リスクも伴います。領域が増えるほど、同期エラーの可能性が高くなります。
- 可能な限り、領域同士を独立させましょう。
- イベントブロードキャストは慎重に使用してください。
- 同時領域間で共有される可変状態を避けてください。
🔄 遷移とイベントの処理
状態間の移動が、ほとんどの論理エラーが発生する場所です。イベント処理の順序は非常に重要です。
イベントの優先順位付け
すべてのイベントが同等ではありません。ハードウェア障害イベントはステータス更新イベントを上書きしなければなりません。図に優先順位レベルを定義してください。
遷移のトリガー
すべての状態が、関連するすべてのイベントに対して明確な応答を持つことを確認してください。イベントが無視された場合、それはノーオペレーションとして扱われます。予期しないイベントが発生した場合、定義されていない動作を引き起こす可能性があります。
自己遷移
自己遷移(同じ状態に留まる)は、リトライやループの処理に役立ちます。ただし、ブレイク条件がない場合、自己遷移内で無限ループを避けてください。
📊 遷移戦略の比較
| 戦略 | 長所 | 短所 | デッドロックのリスク |
|---|---|---|---|
| 即時実行 | 応答時間が早い | 中断しにくい | 低 |
| 遅延実行 | プリエンプションを許可する | 遅延が大きい | 中 |
| イベントキューイング | バースト処理に対応できる | メモリオーバーヘッド | 高い(キューがブロックした場合) |
| 割り込み駆動 | リアルタイム応答性 | 複雑な同期 | 中程度 |
🧩 リソースとロックの管理
ファームウェアはしばしばハードウェア周辺機器とやり取りする。これらのリソースは、破損を防ぐために排他的なアクセスが必要である。
リソース割当
ロックの取得には厳格なルールを適用する。
- すべての状態で、一貫した順序でロックを取得する。
- 使用後、直ちにロックを解放する。
- 他のリソースを待っている間、ロックを保持してはならない。
デッドロック防止マトリクス
マトリクスを使用してリソースの依存関係を追跡する。
- すべての状態をリストアップする。
- すべてのリソースをリストアップする。
- どの状態がどのリソースを保持しているかをマークする。
- 依存関係グラフ内のサイクルを特定する。
サイクルが存在する場合、それを破るために状態遷移を再設計する。
🧪 テストと検証
図の設計は作業の半分に過ぎない。検証により、実装がモデルと一致していることを確認できる。
モデルインザループテスト
ハードウェアに展開する前に、シミュレーション環境で状態機械の論理を実行する。これにより、物理的部品を損傷させるリスクを伴わずにストレステストが可能になる。
ハードウェアインザループテスト
ファームウェアをシミュレートされた物理環境に接続する。タイミング制約とセンサーのフィードバックループを検証する。
ファズテスト
システムにランダムなイベントを注入する。状態機械が予期しない入力を適切に処理するか、クラッシュするかを観察する。
ログ記録とトレース
状態遷移に対して詳細なログ記録を実装する。
- エントリおよびエグジットのタイムスタンプをログに記録する。
- イベントのトリガーと遷移の結果をログに記録する。
- リソースの取得と解放をログに記録する。
このデータは、特定の条件下でのみ発生する間欠的なデッドロックを診断する上で不可欠である。
🔍 特定のデッドロック状況の分析
ロボティクスファームウェアで問題が発生する具体的な例を見てみよう。
シナリオ1:センサー待機
状態: Lidarデータを待機中。
条件: 「DataReceived」が発生した場合のみ遷移する。
問題: センサーがデータを送信しなければ、状態は決して終了しない。ロボットがフリーズする。
解決策: タイムアウト遷移を追加する。「DataReceived」が5秒以内に到着しなければ、「SensorError」状態に遷移する。
シナリオ2:モーターのロック
状態: バッテリー充電中。
条件: 「BatteryFull」が発生した場合、「Idle」に遷移する。
問題: 「BatteryFull」イベントは充電回路によって生成される。メインプロセッサはステータスレジスタをポーリングしない。
解決策: インタラプトハンドラがイベントをステートマシンキューに投稿することを確実にする。ビジーループでのポーリングに頼ってはならない。
シナリオ3:ネストされた呼び出し
状態:ナビゲーション中。
条件: サブ関数「PathPlanning」を呼び出す。
問題: 「PathPlanning」が10秒間ブロックする。この間、ステートマシンは他のイベントを処理できない。
解決策: 長時間実行するタスクをバックグラウンドスレッドに移譲する。メインステートマシンに「PlanningComplete」イベントを投稿する。
🔧 コーディング実装パターン
図はコードに明確にマッピングされなければならない。これを達成するための複数のパターンが存在する。
Switch-Caseパターン
現在のステート変数に基づいてスイッチするメインループを使用する。シンプルだが、ステートが多数になると扱いにくくなる。
- 利点:シンプルなマシンでは読みやすい。
- 欠点:リファクタリングが難しい上、caseラベルにタイプミスが発生しやすい。
ステートオブジェクトパターン
各ステートは共通インターフェースを実装するクラスである。メインループは現在のステートのhandleメソッドを呼び出す。
- 利点:ロジックをカプセル化でき、拡張が容易。
- 欠点:オーバーヘッドが増える、メモリ使用量が増加する。
テーブル駆動アプローチ
遷移をデータテーブルに格納する。エンジンは現在のステートとイベントに基づいて次のステートを検索する。
- 利点:非常に設定可能で、データとロジックを分離できる。
- 欠点:デバッグが難しくなる場合があり、堅牢なエンジンが必要となる。
🛠️ エンベデッド制約への最適化
ロボティクスファームウェアは、限られたRAMとCPUを備えたマイコン上で動作することが多い。
メモリ管理
- 実行時におけるステートオブジェクトの動的割り当てを避ける。
- 起動時にイベントバッファを事前に割り当てる。
- 文字列やログには固定サイズのバッファを使用する。
CPU使用率
- ステート遷移をアトミックに保つ。
- 遷移ハンドラ内での処理時間を最小限に抑える。
- 割り込みはハードウェアイベントのみに使用し、ソフトウェアロジックには使わない。
📈 メンテナンスと進化
ロボットは進化する。要件は変化する。ステートマシンはそれに適応しなければならない。
バージョン管理
ステート図をソースコードと共にバージョン管理に保持する。これにより、モデルと実装が一致していることを保証できる。
ドキュメント
複雑な論理を説明するコメントで図を注釈してください。図だけに頼ってはいけません。
リファクタリング
新しい機能を追加する際は、既存の状態を確認してください。新しいロジックが新たなデッドロック経路を導入しないことを確認してください。
🚀 主な教訓の要約
信頼性の高いロボティクスファームウェアを構築するには、規律ある設計が必要です。状態機械は強力なツールですが、イベントとリソースの管理に細心の注意を要します。
- タイムアウトを定義する: 状態が永遠に待機するようにしてはいけません。
- リソースを管理する: 円環依存を避ける。
- 徹底的にテストする: シミュレーションとファズィングを使用する。
- イベントを監視する: すべての入力が処理されることを確認する。
- シンプルを心がける: 可能な限り複雑さを減らす。
これらの実践を守ることで、開発者は耐障害性があり予測可能なシステムを構築できます。機能性と安全性が最優先です。デッドロックを回避することで、ロボットが中断されることなくミッションを完了できます。
🔮 今後の検討事項
ロボティクスシステムがより自律的になるにつれ、状態機械は上位の意思決定レイヤーと統合する必要が出てきます。機械学習モデルが行動を提案する可能性がありますが、状態機械は守りの役割を維持すべきです。
- AIと状態論理の間のインターフェースが明確に定義されていることを確認する。
- AIレイヤーが故障した場合でも、段階的な劣化を許容する。
- 重要な経路では、確率的な結果よりも決定論的な振る舞いを優先し続ける。
いかなる堅牢なシステムの基盤は、その運用状態を明確に理解することにあります。設計段階に時間を投資してください。適切に構造化された図は現場で大きな利益をもたらします。
📝 実装に関する最終的な注意点
図は契約であることを思い出してください。システムがすべての条件下でどのように振る舞うかを定義しています。それを契約として扱いましょう。同僚とレビューし、仮定を疑い、エッジケースをテストしてください。この注意深い姿勢こそが、機能するプロトタイプと本番用のファームウェアを分けるものです。
デッドロックが発生した際は、ハードウェア障害だと仮定してはいけません。多くの場合、論理的な欠陥が原因です。状態遷移を見直してください。ガードを確認してください。イベントの流れを検証してください。解決策は設計にあります。
これらのベストプラクティスを採用することで、デバッグが容易で、運用が安全で、保守が効率的なシステムが得られます。信頼性への道は、明確な状態と定義された遷移で舗装されています。
