











A programação de robôs envolve gerenciar interações complexas entre sensores, atuadores e lógica de tomada de decisões. Quando um robô opera de forma autônoma, ele deve lidar com várias condições sem intervenção humana. Uma máquina de estados finita (FSM) fornece um método estruturado para modelar esse comportamento. Este guia aborda diagramas de máquinas de estados UML especificamente para contextos de robótica, ajudando você a visualizar a lógica sem depender de ferramentas de software específicas.
🧠 Por que usar máquinas de estados na robótica?
Sistemas robóticos frequentemente operam em ambientes onde as entradas mudam de forma imprevisível. Um script linear não consegue lidar facilmente com cenários em que o robô precisa pausar, esperar por um sensor, retomar ou parar devido a um erro. As máquinas de estados dividem o comportamento em discretos estados. Em qualquer momento dado, o robô está em um estado específico, e as transições ocorrem quando ocorrem eventos específicos eventos acontecem.
Usar diagramas para mapear essa lógica oferece vários benefícios:
- Clareza:Representações visuais são mais fáceis de revisar do que linhas de código.
- Modularidade:Comportamentos complexos podem ser aninhados dentro de estados pais.
- Depuração:É mais fácil rastrear o fluxo de controle quando a lógica é visualizada.
- Segurança:Estados críticos como “Parada de Emergência” são claramente definidos e difíceis de ignorar.
📐 Componentes Principais de um Diagrama de Máquina de Estados
Para construir um diagrama, você precisa entender os blocos fundamentais. Esses elementos formam o vocabulário do seu projeto.
1. Estados (🟦)
Um estado representa uma condição durante a qual o robô realiza uma tarefa específica ou espera por uma condição. Os estados geralmente são desenhados como retângulos arredondados.
- Estado Inicial: O ponto de partida, geralmente um pequeno círculo preenchido.
- Estado Final: O ponto final, geralmente um círculo duplo.
- Estado Simples: Uma única condição (por exemplo, Inativo, Carregando).
- Estado Composto: Um estado que contém subestados (por exemplo, Navegação contendo SeguirLinha e EvitarObstáculo).
2. Transições (➡️)
Uma transição define como o sistema passa de um estado para outro. Ela é representada por uma linha com uma seta na ponta.
- Disparador: O evento que causa a mudança (por exemplo, Botão Pressionado, Obstáculo Detectado).
- Condição de Guarda: Uma expressão booleana que deve ser verdadeira para que a transição ocorra (por exemplo, [Bateria > 20%]).
- Ação: Código executado durante a transição (por exemplo, Registrar Erro, Reiniciar Sensor).
3. Eventos e Sinais (📡)
Eventos são ocorrências que acionam transições. Em robótica, esses eventos geralmente vêm de:
- Entradas de sensores (LiDAR, Câmeras, Toque).
- Temporizadores internos (temporizações).
- Comandos externos (interface do usuário, controle remoto).
🛠️ Projetando um Controlador de Robô: Passo a Passo
Vamos percorrer o processo de projetar uma máquina de estados para um robô móvel autônomo encarregado de patrulhar um armazém. Não usaremos nenhum software de desenho; definiremos a lógica conceitualmente e depois estruturaremos.
Passo 1: Defina o Ponto de Entrada
Todo programa começa em algum lugar. Para um robô, isso geralmente é oSequência de Inicialização. Durante este estado, o sistema inicializa o hardware, verifica as conexões e carrega arquivos de configuração.
Passo 2: Identifique os Estados Operacionais Principais
Após inicializado, quais são os principais modos? Considere o seguinte:
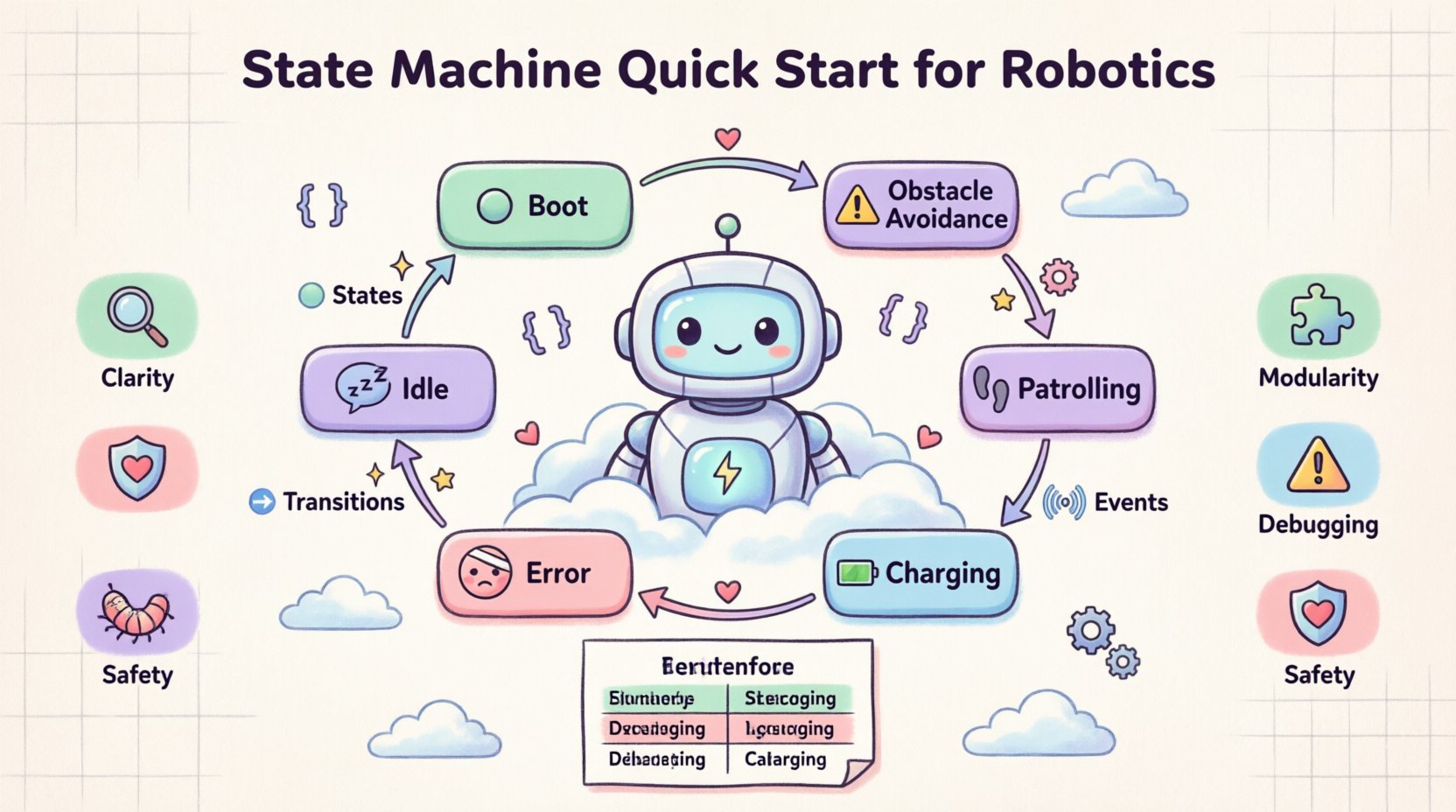
- Inativo: O robô está parado, aguardando um comando.
- Patrulhando: O robô está se movendo ao longo de um caminho pré-definido.
- Evitação de Obstáculos: O robô detecta um objeto e se desvia dele.
- Carregando: O robô retorna a um ponto de carga para recarregar.
- Erro: Falha no sistema detectada; o robô para.
Passo 3: Mapeie as Transições
Conecte os estados com base no fluxo lógico. Por exemplo:
- Do estado Inativo: Transição para Patrulhando quando Comando de Início for recebido.
- Do estado Patrulhando: Transição para Evitação de Obstáculos quando Sensor de Proximidade dispara.
- De Evitação de Obstáculos: Transição de volta para Patrulhamento quando Caminho Livre.
- De Qualquer Estado: Transição para Carregamento quando Bateria Baixa.
- De Qualquer Estado: Transição para Erro quando Falha no Sistema.
📊 Tabela de Transição de Estados
Uma tabela pode complementar um diagrama para definir logicamente com precisão. Isso geralmente é mais fácil de ler do que um diagrama visual complexo para sistemas simples.
| Estado Atual | Evento / Condição | Próximo Estado | Ações |
|---|---|---|---|
| Inativo | Comando de Início | Patrulhamento | Iniciar Caminho, Habilitar Motores |
| Patrulhamento | Obstáculo Detectado | Evitar Obstáculo | Parar, Escanear, Rotacionar |
| Evitar Obstáculo | Caminho Livre | Patrulhamento | Retomar Caminho |
| Patrulhamento | Bateria < 20% | Carregando | Parar, Localizar Doca, Acoplar |
| Carregando | Bateria > 90% | Inativo | Desconectar, Retornar ao Início |
| Qualquer Estado | Parada de Emergência | Erro | Cortar Alimentação dos Motores, Registrar Evento |
🔄 Manipulando Lógica Complexa com Estados Hierárquicos
Robôs do mundo real frequentemente têm lógica aninhada. Um único estado pode conter múltiplos subestados. Isso é conhecido como Máquinas de Estados Hierárquicos.
Exemplo: Estado de Navegação
O Patrulhamentoestado pode ser um estado composto. Dentro dele, você pode ter:
- Sub-Estado: Avançando: O robô avança em linha reta.
- Sub-Estado: Virando: O robô ajusta a direção.
- Sub-Estado: Parando: O robô desacelera.
Quando o robô está em Patrulhando, tecnicamente, também está em um desses sub-estados. Isso permite definir comportamentos comuns para o estado pai, mantendo detalhes específicos nos estados filhos.
⚠️ Tratamento de Erros e Estados de Segurança
A robótica exige um gerenciamento robusto de erros. Você sempre deve ter um estado dedicado para falhas. Isso garante que o sistema não fique em um estado ruim indefinidamente.
Principais Considerações de Segurança
- Isolamento: Um estado de erro deve impedir a execução de comandos de movimento.
- Visibilidade: O estado deve acionar um alerta (LED, Som, Registro).
- Recuperação: Defina se o sistema pode se recuperar automaticamente ou requer intervenção humana.
- Tempo limite: Se uma transição levar muito tempo, force uma transição para um estado de erro.
Exemplo: Tempo limite do motor
Se o robô tentar se mover, mas o encoder não registrar movimento por 5 segundos:
- Disparador: Evento de tempo limite.
- Transição: De Patrulhando para Erro.
- Ação: Definir sinalizador Travamento do Motor.
🧪 Depuração e Teste da Lógica de Estados
Depois que o diagrama for desenhado, como você verifica se ele funciona? Você não precisa de um IDE específico para testar a lógica no papel primeiro.
1. Simulação de Percurso
Pegue uma caneta e trace caminhos no seu diagrama. Pense que é o robô. Pergunte:
- Consigo alcançar todos os estados?
- Existem estados de onde não consigo sair (impasses)?
- O que acontece se duas eventos acontecerem ao mesmo tempo?
2. Análise de Cobertura
Garanta que cada estado tenha pelo menos uma transição de entrada e uma transição de saída (exceto o início e o fim). Isso evita que o robô fique preso.
3. Teste de Casos de Borda
Considere cenários que não estão no fluxo principal:
- Perda de energia durante uma transição.
- Ruído do sensor (alternação rápida de eventos).
- Eventos de alta prioridade simultâneos.
🚀 Padrões Comuns em Robótica
Vários padrões aparecem com frequência nas máquinas de estado robóticas. Reconhecê-los pode acelerar seu processo de design.
O Timer de Vigilância
Um temporizador que é reiniciado apenas se o sistema estiver funcionando corretamente. Se o temporizador expirar, força uma transição para um estado seguro (como Reinicialização).
O Estado de Falha
Um estado genérico usado quando condições específicas não são atendidas. Por exemplo, se um algoritmo de navegação falhar, o robô entra em um Buscando por Casa estado em vez de travar.
Estados Preemptivos
Estados que interrompem outros. O Parada de Emergência o estado é o estado preemptivo definitivo. Ele substitui Patrulhando, Carregando, ou Inativo imediatamente.
🛠️ Melhores Práticas para Diagramação
Siga estas diretrizes para manter seus diagramas mantidos e claros.
1. Mantenha os Estados Atômicos
Evite tornar os estados muito complexos. Se um estado contém muita lógica, divida-o em subestados menores. Um estado deve representar o que o que o robô está fazendo, e sim como ele faz isso em detalhes.
2. Use Nomes Claros
Os nomes devem ser descritivos. Evite nomes genéricos como Estado 1. Use Aguardando Acoplamento em vez de Aguardando.
3. Limite as Transições
Muitas linhas se cruzando tornam um diagrama ilegível. Se um estado tiver muitas transições, considere agrupá-las ou usar um estado composto.
4. Documente as Condições de Guarda
Sempre escreva a condição exata para uma transição. Não escreva apenas “Erro”; escreva “[Sinalização de Erro == Verdadeiro]”.
5. Controle de Versão
Mesmo que você não esteja usando software, trate seus diagramas como código. Mantenha versões. Se você mudar a lógica, anote o que mudou e por quê.
🔄 Concorrência em Robótica
Alguns robôs realizam múltiplas tarefas simultaneamente. Enquanto máquinas de estado básicas são sequenciais, os projetos avançados lidam com concorrência. Isso significa que o robô pode estar em múltiplos estados ao mesmo tempo.
Exemplo: Monitoramento e Movimentação
Um robô pode estar Patrulhando enquanto simultaneamente Monitorando Sensores. Em um diagrama, isso é frequentemente representado por regiões paralelas.
- Região 1: Controle de Movimento (Patrulhando, Parando).
- Região 2: Monitoramento de Sensores (Escutando, Varrendo).
Mudanças na Região 2 não necessariamente interrompem a Região 1. Isso adiciona complexidade ao diagrama, mas é necessário para a autonomia avançada.
🧩 Integração com Código
Como você transforma este diagrama em software funcional? O diagrama serve como a especificação.
1. Enumerações
Mapeie cada estado para uma enumeração no seu código. Isso evita erros de digitação nos nomes dos estados.
2. Estruturas Switch/Case
Use a variável de estado para alternar entre diferentes blocos de lógica. Isso reflete a estrutura visual do diagrama.
3. Filas de Eventos
Eventos devem ser armazenados em uma fila. O loop principal processa um evento de cada vez, acionando a transição apropriada com base no estado atual.
📈 Escalando Sua Lógica
À medida que seu projeto de robô cresce, a máquina de estado também crescerá. Você pode precisar refatorar seu diagrama.
- Modularização: Extraia comportamentos comuns em máquinas de estado separadas que podem ser reutilizadas em diferentes robôs.
- Abstração: Oculte detalhes de baixo nível. A máquina de estados de alto nível deve lidar com Mover, e não Velocidade do Motor.
- Ciclos de Revisão: Revise regularmente o diagrama com sua equipe para garantir que ele corresponda à implementação atual.
🔧 Solução de Problemas Comuns
Mesmo com um bom diagrama, surgem problemas de implementação.
Problema: Condições de Corrida
Se dois eventos ocorrerem quase simultaneamente, o robô pode reagir de forma imprevisível. Use fila de eventos para garantir uma ordem estrita de processamento.
Problema: Laços Infinitos
Uma máquina de estados pode ficar em loop entre dois estados sem fazer trabalho. Certifique-se de que as transições tenham condições de guarda que eventualmente se tornem verdadeiras.
Problema: Desalinhamento de Estados
O código pode estar em um estado diferente do que o diagrama sugere. Adicione registro nos pontos de entrada e saída de cada estado para verificar a sincronização.
🎓 Resumo dos Principais Pontos
Projetar uma máquina de estados para robótica trata-se de clareza e controle. Isso obriga você a pensar em todas as condições possíveis antes de escrever código.
- Comece com uma definição clara de estados e eventos.
- Use diagramas para visualizar o fluxo antes de codificar.
- Trate erros explicitamente com estados dedicados.
- Mantenha os estados simples e atômicos.
- Teste a lógica no papel antes da implantação.
- Use tabelas para complementar transições complexas.
Ao dominar a estrutura dos diagramas de máquinas de estados, você constrói uma base para sistemas robóticos robustos e confiáveis. Essa abordagem reduz erros e torna a manutenção significativamente mais fácil para atualizações futuras.
