











Lập trình robot bao gồm việc quản lý các tương tác phức tạp giữa cảm biến, bộ chấp hành và logic ra quyết định. Khi một robot hoạt động tự động, nó phải xử lý nhiều điều kiện mà không cần can thiệp của con người. Máy trạng thái hữu hạn (FSM) cung cấp một phương pháp có cấu trúc để mô hình hóa hành vi này. Hướng dẫn này tập trung vào các sơ đồ máy trạng thái UML đặc biệt dành cho bối cảnh robot, giúp bạn trực quan hóa logic mà không cần phụ thuộc vào các công cụ phần mềm cụ thể.
🧠 Tại sao nên sử dụng máy trạng thái trong robot?
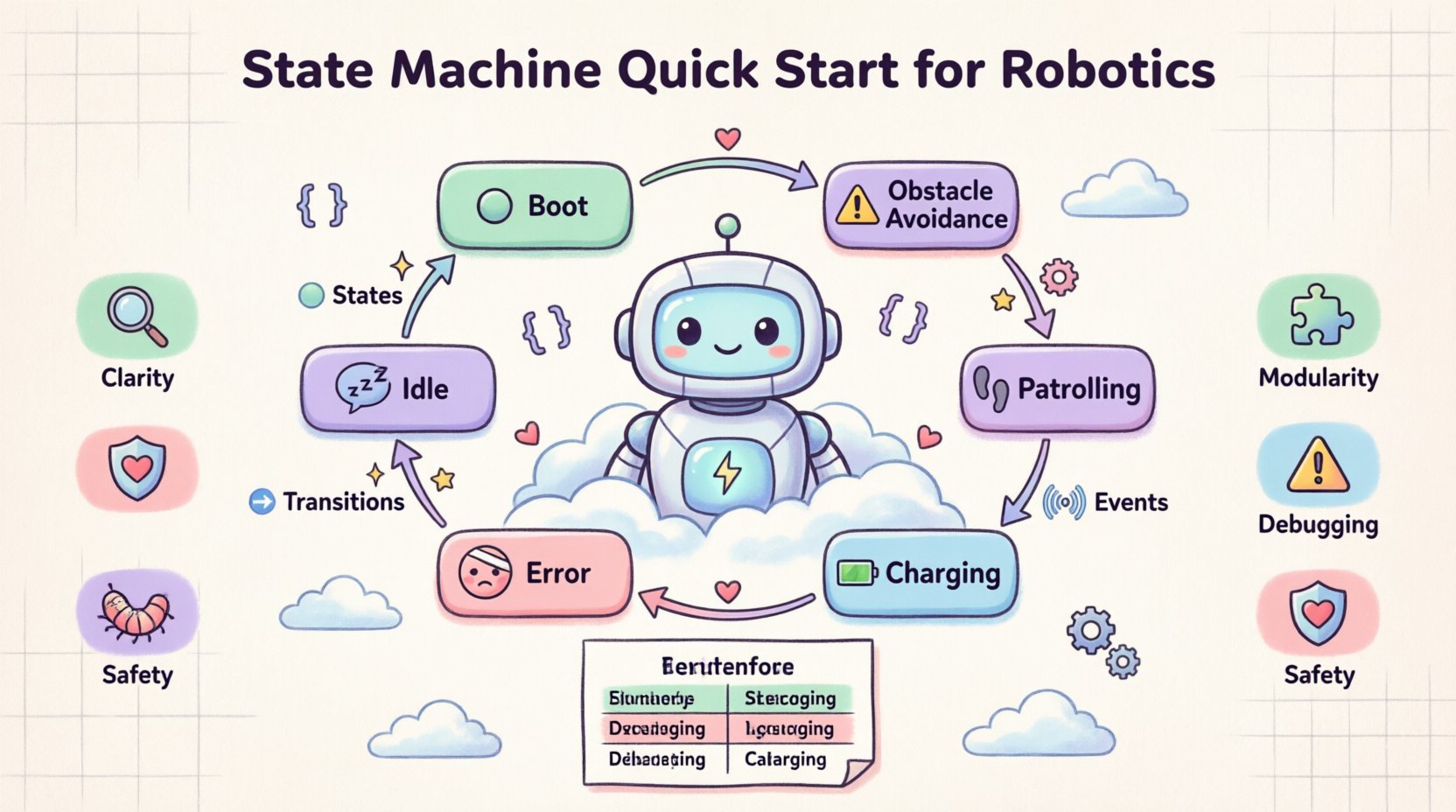
Các hệ thống robot thường hoạt động trong môi trường mà đầu vào thay đổi một cách không lường trước. Một đoạn mã tuyến tính không thể dễ dàng xử lý các tình huống mà robot phải tạm dừng, chờ cảm biến, tiếp tục hoặc dừng lại do lỗi. Máy trạng thái chia nhỏ hành vi thành các trạng thái rời rạctrạng thái. Vào bất kỳ thời điểm nào, robot đang ở một trạng thái cụ thể, và các chuyển tiếp xảy ra khi các sự kiện cụ thểsự kiện xảy ra.
Sử dụng sơ đồ để biểu diễn logic này mang lại nhiều lợi ích:
- Rõ ràng:Các biểu diễn trực quan dễ xem xét hơn so với các dòng mã lệnh.
- Tính module:Các hành vi phức tạp có thể được lồng ghép bên trong các trạng thái cha.
- Gỡ lỗi:Dễ dàng theo dõi luồng điều khiển hơn khi logic được trực quan hóa.
- An toàn:Các trạng thái quan trọng như “Tạm dừng khẩn cấp” được xác định rõ ràng và khó bỏ sót.
📐 Các thành phần chính của sơ đồ máy trạng thái
Để xây dựng một sơ đồ, bạn phải hiểu các khối xây dựng cơ bản. Những thành phần này tạo nên từ vựng cho thiết kế của bạn.
1. Trạng thái (🟦)
Một trạng thái đại diện cho một điều kiện trong đó robot thực hiện một nhiệm vụ cụ thể hoặc chờ một điều kiện. Các trạng thái thường được vẽ dưới dạng hình chữ nhật tròn.
- Trạng thái ban đầu: Điểm bắt đầu, thường là một hình tròn nhỏ được tô đầy.
- Trạng thái kết thúc: Điểm kết thúc, thường là một hình tròn kép.
- Trạng thái đơn giản: Một điều kiện duy nhất (ví dụ nhưĐang chờ, Đang sạc).
- Trạng thái hợp thành: Một trạng thái chứa các trạng thái con (ví dụ như Điều hướng chứa Theo đường và Tránh vật cản).
2. Chuyển tiếp (➡️)
Một chuyển tiếp xác định cách hệ thống di chuyển từ một trạng thái sang trạng thái khác. Nó được biểu diễn bằng một đường thẳng có đầu mũi tên.
- Kích hoạt: Sự kiện gây ra sự di chuyển (ví dụ như Nút được nhấn, Vật cản được phát hiện).
- Điều kiện bảo vệ: Một biểu thức logic phải đúng để chuyển tiếp xảy ra (ví dụ như [Pin > 20%]).
- Hành động: Mã được thực thi trong quá trình chuyển tiếp (ví dụ như Ghi lỗi, Khởi động lại cảm biến).
3. Sự kiện và tín hiệu (📡)
Các sự kiện là những sự kiện xảy ra làm kích hoạt các chuyển tiếp. Trong robot, chúng thường đến từ:
- Đầu vào cảm biến (LiDAR, Camera, Cảm ứng).
- Bộ đếm nội bộ (Thời gian chờ).
- Lệnh bên ngoài (Giao diện người dùng, Điều khiển từ xa).
🛠️ Thiết kế bộ điều khiển robot: Bước từng bước
Hãy cùng đi qua quá trình thiết kế một máy trạng thái cho một robot di động tự động được giao nhiệm vụ tuần tra một kho hàng. Chúng ta sẽ không sử dụng bất kỳ phần mềm vẽ nào; chúng ta sẽ định nghĩa logic một cách khái niệm và sau đó sắp xếp nó.
Bước 1: Xác định điểm vào
Mỗi chương trình đều bắt đầu từ đâu đó. Với một robot, điều này thường làQuy trình khởi động. Trong trạng thái này, hệ thống khởi tạo phần cứng, kiểm tra kết nối và tải các tệp cấu hình.
Bước 2: Xác định các trạng thái hoạt động chính
Sau khi khởi động, các chế độ chính là gì? Hãy xem xét các tình huống sau:
- Đang chờ: Robot đứng yên, đang chờ lệnh.
- Đang tuần tra: Robot đang di chuyển theo một hành trình đã định trước.
- Tránh vật cản: Robot phát hiện vật thể và điều chỉnh đường đi để tránh nó.
- Đang sạc: Robot quay trở lại điểm sạc để sạc lại.
- Lỗi: Phát hiện lỗi hệ thống; robot dừng lại.
Bước 3: Xác định các chuyển tiếp
Kết nối các trạng thái dựa trên luồng logic. Ví dụ:
- Từ trạng thái Đang chờ: Chuyển sang Đang tuần tra khi Lệnh Bắt đầu được nhận.
- Từ trạng thái Đang tuần tra: Chuyển sang Tránh chướng ngại vật khi Cảm biến khoảng cách kích hoạt.
- Từ Tránh chướng ngại vật: Chuyển trở lại Duyệt quét khi Đường đi thông thoáng.
- Từ bất kỳ trạng thái nào: Chuyển đến Sạc pin khi Pin yếu.
- Từ bất kỳ trạng thái nào: Chuyển đến Lỗi khi Lỗi hệ thống.
📊 Bảng chuyển trạng thái
Một bảng có thể bổ sung cho một sơ đồ để xác định logic một cách chính xác. Điều này thường dễ đọc hơn so với một sơ đồ hình ảnh phức tạp đối với các hệ thống đơn giản.
| Trạng thái hiện tại | Sự kiện / Điều kiện | Trạng thái tiếp theo | Hành động |
|---|---|---|---|
| Đang chờ | Lệnh khởi động | Đi tuần | Khởi tạo đường đi, bật động cơ |
| Đi tuần | Phát hiện vật cản | Tránh vật cản | Dừng lại, quét, xoay |
| Tránh vật cản | Đường đi thông suốt | Đi tuần | Tiếp tục đường đi |
| Đi tuần | Pin < 20% | Đang sạc | Dừng lại, xác định điểm sạc, kết nối sạc |
| Đang sạc | Pin > 90% | Đang chờ | Ngắt kết nối, quay về điểm bắt đầu |
| Mọi trạng thái | Dừng khẩn cấp | Lỗi | Ngắt nguồn cho động cơ, ghi sự kiện |
🔄 Xử lý logic phức tạp với các trạng thái phân cấp
Các robot thực tế thường có logic lồng ghép. Một trạng thái duy nhất có thể chứa nhiều trạng thái con. Điều này được gọi làMáy trạng thái phân cấp.
Ví dụ: Trạng thái điều hướng
Trạng tháiĐi tuầncó thể là một trạng thái tổng hợp. Bên trong nó, bạn có thể có:
- Trạng thái con: Tiến về phía trước: Robot di chuyển thẳng.
- Trạng thái con: Rẽ hướng: Robot điều chỉnh hướng di chuyển.
- Trạng thái con: Dừng lại: Robot giảm tốc độ.
Khi robot ở trong Đi tuần tra, về mặt kỹ thuật nó cũng đang ở một trong các trạng thái con này. Điều này cho phép bạn định nghĩa các hành vi chung cho trạng thái cha trong khi vẫn giữ các chi tiết cụ thể ở các trạng thái con.
⚠️ Xử lý lỗi và các trạng thái an toàn
Robotics đòi hỏi quản lý lỗi mạnh mẽ. Bạn luôn nên có một trạng thái riêng biệt cho các sự cố. Điều này đảm bảo hệ thống không bị lặp vô hạn trong tình trạng xấu.
Các yếu tố an toàn quan trọng
- Tách biệt:Trạng thái lỗi nên ngăn việc thực thi các lệnh chuyển động.
- Nhìn thấy được:Trạng thái này nên kích hoạt cảnh báo (đèn LED, âm thanh, nhật ký).
- Khôi phục: Xác định xem hệ thống có thể khôi phục tự động hay cần can thiệp của con người.
- Hạn chế thời gian: Nếu một chuyển tiếp mất quá nhiều thời gian, buộc chuyển sang trạng thái lỗi.
Ví dụ: Hết thời gian chờ động cơ
Nếu robot cố gắng di chuyển nhưng bộ mã hóa không ghi nhận chuyển động trong 5 giây:
- Kích hoạt:Sự kiện hết thời gian chờ.
- Chuyển tiếp: Từ Đi tuần tra đến Lỗi.
- Hành động: Đặt cờ Động cơ bị kẹt.
🧪 Gỡ lỗi và kiểm tra logic trạng thái
Sau khi vẽ sơ đồ xong, bạn làm cách nào để xác minh nó hoạt động? Bạn không cần một IDE cụ thể để kiểm tra logic trên giấy trước tiên.
1. Mô phỏng đi qua từng bước
Lấy bút và theo dõi các đường đi trên sơ đồ của bạn. Giả vờ mình là robot. Hỏi:
- Tôi có thể đạt đến mọi trạng thái không?
- Có trạng thái nào tôi không thể rời khỏi (bế tắc) không?
- Điều gì xảy ra nếu hai sự kiện xảy ra cùng lúc?
2. Phân tích độ bao phủ
Đảm bảo mỗi trạng thái có ít nhất một chuyển tiếp đầu vào và một chuyển tiếp đầu ra (trừ trạng thái bắt đầu và kết thúc). Điều này ngăn robot bị kẹt.
3. Kiểm thử các trường hợp biên
Xem xét các tình huống không nằm trong luồng chính:
- Mất điện trong quá trình chuyển tiếp.
- Tiếng ồn cảm biến (chuyển đổi nhanh chóng của các sự kiện).
- Các sự kiện ưu tiên cao xảy ra đồng thời.
🚀 Các mẫu phổ biến trong robot
Một số mẫu xuất hiện thường xuyên trong máy trạng thái robot. Nhận diện những mẫu này có thể giúp đẩy nhanh quá trình thiết kế của bạn.
Bộ đếm giám sát (Watchdog Timer)
Một bộ đếm chỉ được reset nếu hệ thống đang hoạt động đúng. Nếu bộ đếm hết hạn, nó sẽ buộc chuyển sang trạng thái an toàn (ví dụ nhưKhởi động lại).
Trạng thái dự phòng
Một trạng thái chung được sử dụng khi các điều kiện cụ thể không được đáp ứng. Ví dụ, nếu thuật toán định vị thất bại, robot sẽ chuyển sang trạng tháiĐang tìm kiếm nhàtrạng thái thay vì sập hệ thống.
Trạng thái ưu tiên
Các trạng thái có thể ngắt các trạng thái khác. Trạng tháiDừng khẩn cấp trạng thái là trạng thái ưu tiên tuyệt đối. Nó ghi đè lên Đi tuần, Đang sạc, hoặc Đang chờ ngay lập tức.
🛠️ Các thực hành tốt nhất khi vẽ sơ đồ
Tuân theo các hướng dẫn này để giữ cho sơ đồ của bạn dễ bảo trì và rõ ràng.
1. Giữ các trạng thái ở mức nguyên tử
Tránh làm cho các trạng thái quá phức tạp. Nếu một trạng thái chứa quá nhiều logic, hãy chia nhỏ thành các trạng thái con nhỏ hơn. Một trạng thái nên đại diện cho điều gì mà robot đang làm, chứ không phải cách thức nó thực hiện điều đó chi tiết như thế nào.
2. Sử dụng tên rõ ràng
Tên nên mang tính mô tả. Tránh dùng các tên chung chung như Trạng thái 1. Sử dụng Đang chờ kết nối sạc thay vì Đang chờ.
3. Giới hạn các chuyển tiếp
Quá nhiều đường giao nhau sẽ khiến sơ đồ trở nên khó đọc. Nếu một trạng thái có quá nhiều chuyển tiếp, hãy cân nhắc nhóm chúng lại hoặc sử dụng một trạng thái tổng hợp.
4. Ghi chú điều kiện bảo vệ
Luôn ghi rõ điều kiện chính xác cho một chuyển tiếp. Đừng chỉ viết “Lỗi”; hãy viết “[Cờ Lỗi == Đúng]”.
5. Kiểm soát phiên bản
Dù bạn không sử dụng phần mềm, hãy coi sơ đồ của bạn như mã nguồn. Giữ các phiên bản. Nếu bạn thay đổi logic, hãy ghi lại những gì đã thay đổi và lý do tại sao.
🔄 Đồng thời trong robot
Một số robot thực hiện nhiều nhiệm vụ đồng thời. Trong khi các máy trạng thái cơ bản là tuần tự, các thiết kế nâng cao xử lý tính đồng thời. Điều này có nghĩa là robot có thể ở nhiều trạng thái cùng lúc.
Ví dụ: Giám sát và Di chuyển
Một robot có thể đang Đi tuần tra trong khi đồng thời Giám sát cảm biến. Trong sơ đồ, điều này thường được biểu diễn bằng các vùng song song.
- Vùng 1: Kiểm soát chuyển động (Đi tuần tra, Dừng lại).
- Vùng 2: Giám sát cảm biến (Lắng nghe, Quét).
Những thay đổi ở Vùng 2 không nhất thiết làm dừng Vùng 1. Điều này làm tăng độ phức tạp cho sơ đồ nhưng là cần thiết cho sự tự chủ nâng cao.
🧩 Tích hợp với mã nguồn
Làm thế nào để biến sơ đồ này thành phần mềm hoạt động? Sơ đồ đóng vai trò như tài liệu yêu cầu.
1. Các kiểu liệt kê
Gán mỗi trạng thái vào một kiểu liệt kê trong mã nguồn của bạn. Điều này ngăn ngừa lỗi chính tả trong tên trạng thái.
2. Câu lệnh Switch/Case
Sử dụng biến trạng thái để chuyển đổi giữa các khối logic khác nhau. Điều này phản ánh cấu trúc trực quan của sơ đồ.
3. Hàng đợi sự kiện
Các sự kiện nên được lưu trong hàng đợi. Vòng lặp chính xử lý một sự kiện tại một thời điểm, kích hoạt chuyển tiếp phù hợp dựa trên trạng thái hiện tại.
📈 Mở rộng logic của bạn
Khi dự án robot của bạn phát triển, máy trạng thái sẽ mở rộng theo. Bạn có thể cần phải tái cấu trúc sơ đồ của mình.
- Chia nhỏ thành mô-đun: Trích xuất các hành vi chung vào các máy trạng thái riêng biệt có thể được tái sử dụng trên nhiều robot khác nhau.
- Trừu tượng hóa: Ẩn các chi tiết cấp thấp. Máy trạng thái cấp cao nên xử lý với Di chuyển, không phải là Tốc độ động cơ.
- Vòng kiểm tra: Thường xuyên xem xét sơ đồ cùng đội của bạn để đảm bảo nó phù hợp với triển khai hiện tại.
🔧 Chẩn đoán và khắc phục các vấn đề phổ biến
Ngay cả khi có sơ đồ tốt, các vấn đề triển khai vẫn xảy ra.
Vấn đề: Điều kiện cạnh tranh
Nếu hai sự kiện xảy ra gần như đồng thời, robot có thể phản ứng không lường trước được. Sử dụng hàng đợi sự kiện để đảm bảo thứ tự xử lý nghiêm ngặt.
Vấn đề: Vòng lặp vô hạn
Một máy trạng thái có thể lặp giữa hai trạng thái mà không thực hiện công việc. Đảm bảo các chuyển tiếp có điều kiện bảo vệ sẽ trở thành đúng trong tương lai.
Vấn đề: Không khớp trạng thái
Mã nguồn có thể ở trạng thái khác với những gì sơ đồ gợi ý. Thêm ghi nhật ký tại điểm vào và ra của mỗi trạng thái để xác minh sự đồng bộ.
🎓 Tóm tắt những điểm chính cần ghi nhớ
Thiết kế máy trạng thái cho robot là về sự rõ ràng và kiểm soát. Nó buộc bạn phải suy nghĩ về mọi điều kiện có thể xảy ra trước khi viết mã.
- Bắt đầu bằng định nghĩa rõ ràng về các trạng thái và sự kiện.
- Sử dụng sơ đồ để hình dung luồng trước khi lập trình.
- Xử lý lỗi một cách rõ ràng bằng các trạng thái chuyên dụng.
- Giữ các trạng thái đơn giản và nguyên tử.
- Kiểm tra logic trên giấy trước khi triển khai.
- Sử dụng bảng để bổ sung cho các chuyển tiếp phức tạp.
Bằng cách nắm vững cấu trúc sơ đồ máy trạng thái, bạn xây dựng nền tảng cho các hệ thống robot vững chắc và đáng tin cậy. Cách tiếp cận này giảm thiểu lỗi và làm cho việc bảo trì dễ dàng hơn đáng kể cho các bản cập nhật trong tương lai.
