











Программирование робототехники включает в себя управление сложными взаимодействиями между датчиками, приводами и логикой принятия решений. Когда робот работает автономно, он должен управлять различными условиями без участия человека. Конечный автомат (КАв) предоставляет структурированный способ моделирования такого поведения. Это руководство охватывает диаграммы конечных автоматов UML, специально для контекстов робототехники, помогая вам визуализировать логику без привязки к конкретным программным инструментам.
🧠 Зачем использовать конечные автоматы в робототехнике?
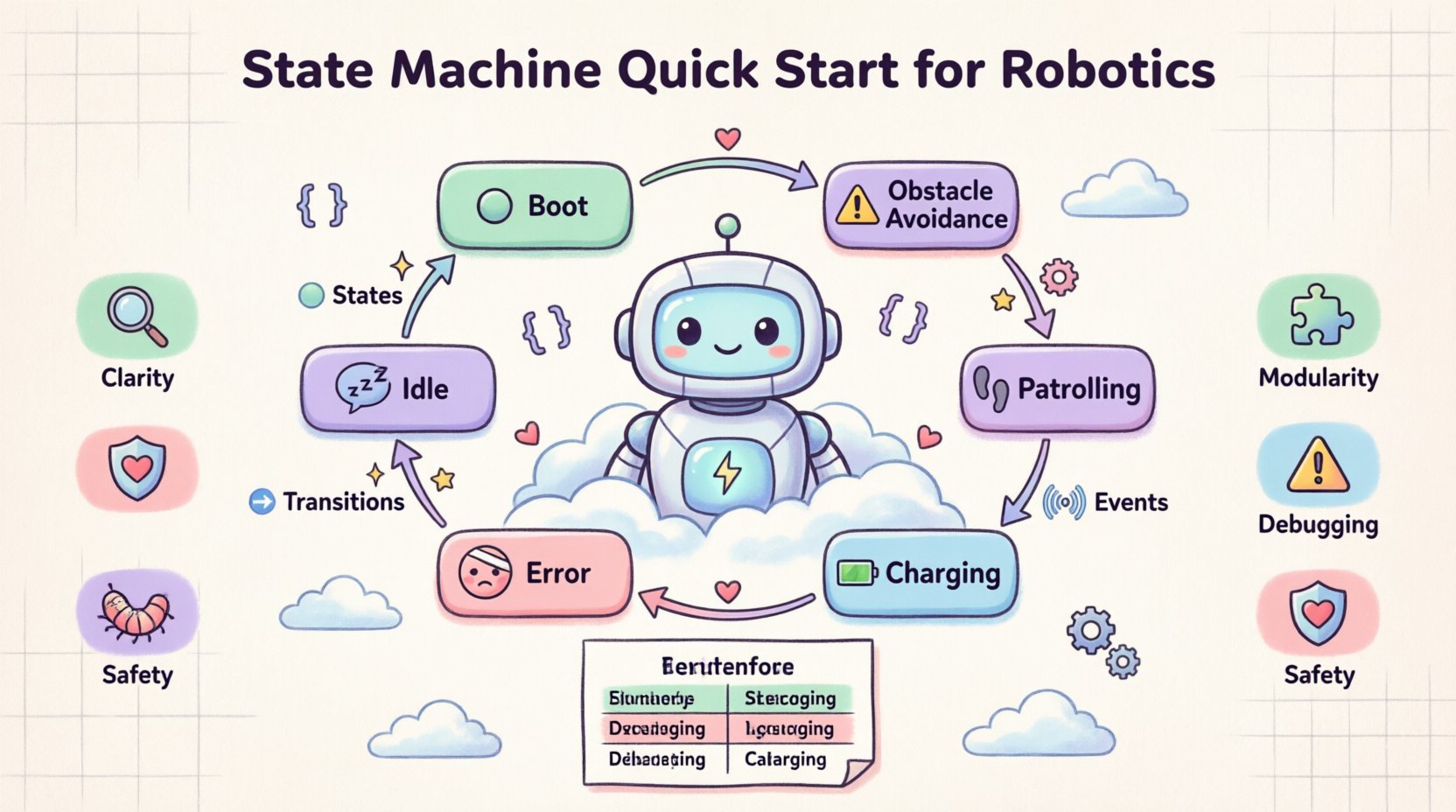
Системы роботов часто работают в средах, где входные данные изменяются непредсказуемо. Линейный скрипт не может легко справиться со случаями, когда робот должен приостановиться, ждать срабатывания датчика, возобновить работу или остановиться из-за ошибки. Конечные автоматы разбивают поведение на дискретныесостояния. В любой момент времени робот находится в одном конкретном состоянии, и переходы происходят, когда происходят определённыесобытия происходят.
Использование диаграмм для визуализации этой логики даёт несколько преимуществ:
- Чёткость:Визуальные представления проще проверять, чем строки кода.
- Модульность:Сложные поведения могут быть вложены в родительские состояния.
- Отладка:Легче отслеживать поток управления, когда логика визуализирована.
- Безопасность:Критические состояния, такие как «Аварийная остановка», чётко определены и легко заметны.
📐 Основные компоненты диаграммы конечного автомата
Чтобы построить диаграмму, необходимо понимать основные элементы. Эти компоненты формируют словарь вашего дизайна.
1. Состояния (🟦)
Состояние представляет собой условие, в течение которого робот выполняет определённую задачу или ожидает выполнения условия. Состояния обычно изображаются в виде закруглённых прямоугольников.
- Начальное состояние: Начальная точка, обычно небольшой закрашенный круг.
- Конечное состояние: Конечная точка, обычно двойной круг.
- Простое состояние: Одно условие (например, Простой режим, Зарядка).
- Составное состояние: Состояние, содержащее подсостояния (например, Навигация содержащее Следование линии и Обход препятствий).
2. Переходы (➡️)
Переход определяет, как система переходит из одного состояния в другое. Он обозначается линией с стрелкой на конце.
- Событие-триггер: Событие, вызывающее переход (например, Нажатие кнопки, Обнаружено препятствие).
- Условие-ограничение: Логическое выражение, которое должно быть истинным для выполнения перехода (например, [Аккумулятор > 20%]).
- Действие: Код, выполняемый во время перехода (например, Запись ошибки, Сброс сенсора).
3. События и сигналы (📡)
События — это происшествия, запускающие переходы. В робототехнике они часто поступают от:
- Входные данные с датчиков (LiDAR, камеры, касание).
- Внутренние таймеры (таймауты).
- Внешние команды (интерфейс пользователя, пульт дистанционного управления).
🛠️ Проектирование контроллера робота: пошагово
Рассмотрим проектирование машины состояний для автономного мобильного робота, которому поручено патрулирование склада. Мы не будем использовать какое-либо программное обеспечение для рисования; мы определим логику концептуально, а затем структурируем её.
Шаг 1: Определите точку входа
Каждая программа начинается где-то. Для робота это частоПоследовательность загрузки. В этом состоянии система инициализирует аппаратное обеспечение, проверяет соединения и загружает файлы конфигурации.
Шаг 2: Определите основные рабочие состояния
После загрузки, какие основные режимы работы? Рассмотрим следующие:
- Простой: Робот неподвижен, ожидает команды.
- Патрулирование: Робот движется по заранее определённому маршруту.
- Обход препятствий: Робот обнаруживает объект и маневрирует вокруг него.
- Зарядка: Робот возвращается к стоянке для зарядки.
- Ошибка: Обнаружена неисправность системы; робот останавливается.
Шаг 3: Определите переходы
Соедините состояния на основе логического потока. Например:
- Из состояния «Простой»: Переход вПатрулирование когдаКоманда запуска получена.
- Из состояния «Патрулирование»: Переход вОбход препятствий когда Датчик приближения срабатывает.
- Из состояния обхода препятствий: Перейти обратно в Обход когда Путь свободен.
- Из любого состояния: Перейти в Зарядка когда Низкий уровень заряда батареи.
- Из любого состояния: Перейти в Ошибка когда Неисправность системы.
📊 Таблица переходов состояний
Таблица может дополнить диаграмму для точного определения логики. Это часто проще для чтения, чем сложная визуальная диаграмма для простых систем.
| Текущее состояние | Событие / Условие | Следующее состояние | Действия |
|---|---|---|---|
| Покой | Команда запуска | Патрулирование | Инициализировать путь, включить двигатели |
| Патрулирование | Обнаружен препятствие | Обойти препятствие | Остановка, сканирование, поворот |
| Обойти препятствие | Путь свободен | Патрулирование | Возобновить путь |
| Патрулирование | Аккумулятор < 20% | Зарядка | Остановка, поиск док-станции, докирование |
| Зарядка | Аккумулятор > 90% | Простой | Отключение, возврат в начальную точку |
| Любое состояние | Аварийная остановка | Ошибка | Отключить питание двигателей, записать событие |
🔄 Обработка сложной логики с использованием иерархических состояний
Реальные роботы часто имеют вложенные логические структуры. Одно состояние может содержать несколько подсостояний. Это называетсяИерархические машины состояний.
Пример: состояние навигации
СостояниеПатрулированиеможет быть составным состоянием. Внутри него могут быть:
- Подсостояние: Движение вперед: Робот движется прямо.
- Подсостояние: Поворот: Робот корректирует направление.
- Подсостояние: Остановка: Робот замедляется.
Когда робот находится в патрулирования, технически он также находится в одном из этих подсостояний. Это позволяет вам определить общие поведения для родительского состояния, сохраняя при этом конкретные детали в дочерних состояниях.
⚠️ Обработка ошибок и состояния безопасности
Робототехника требует надежного управления ошибками. Вы всегда должны иметь выделенное состояние для сбоев. Это гарантирует, что система не будет бесконечно циклически находиться в плохом состоянии.
Ключевые аспекты безопасности
- Изоляция: Состояние ошибки должно запрещать выполнение команд движения.
- Видимость: Состояние должно запускать оповещение (светодиод, звук, журнал).
- Восстановление: Определите, может ли система восстановиться автоматически или требуется вмешательство человека.
- Тайм-ауты: Если переход занимает слишком много времени, принудительно перейдите в состояние ошибки.
Пример: Тайм-аут двигателя
Если робот пытается двигаться, но энкодер не фиксирует движение в течение 5 секунд:
- Событие: Событие тайм-аута.
- Переход: Из патрулирования в ошибки.
- Действие: Установить флаг Стall двигателя.
🧪 Отладка и тестирование логики состояний
Как только диаграмма нарисована, как вы проверите, что она работает? Вам не нужно специфическое IDE, чтобы сначала протестировать логику на бумаге.
1. Симуляция пошагового прохождения
Возьмите ручку и проследите пути на своей диаграмме. Представьте, что вы робот. Задайте себе:
- Могу ли я достичь каждого состояния?
- Есть ли состояния, из которых я не могу выйти (зависания)?
- Что произойдет, если два события произойдут одновременно?
2. Анализ покрытия
Убедитесь, что каждое состояние имеет хотя бы один входящий переход и один исходящий переход (кроме начального и конечного). Это предотвращает застревание робота.
3. Тестирование граничных случаев
Рассмотрите сценарии, не входящие в основной поток:
- Потеря питания во время перехода.
- Шум датчика (быстрое переключение событий).
- Одновременные события высокого приоритета.
🚀 Распространённые паттерны в робототехнике
Несколько паттернов часто появляются в конечных автоматах роботов. Признавая их, вы можете ускорить процесс проектирования.
Таймер-наблюдатель
Таймер, который сбрасывается только в том случае, если система работает правильно. Если таймер истекает, он вынуждает перейти в безопасное состояние (например, Перезагрузка).
Состояние резервного варианта
Общее состояние, используемое, когда не выполняются конкретные условия. Например, если алгоритм навигации не работает, робот переходит в состояние Поиск домасостояние, а не аварийно завершается.
Прерывающие состояния
Состояния, которые прерывают другие. Состояние Аварийная остановка состояние является окончательным предварительным состоянием. Оно переопределяет Обход, Зарядка, или Простой немедленно.
🛠️ Лучшие практики для диаграммирования
Следуйте этим рекомендациям, чтобы ваши диаграммы оставались поддерживаемыми и понятными.
1. Держите состояния атомарными
Избегайте чрезмерной сложности состояний. Если состояние содержит слишком много логики, разбейте его на более мелкие подсостояния. Состояние должно представлять что что делает робот, а не как как он это делает подробно.
2. Используйте понятные имена
Имена должны быть описательными. Избегайте общих названий, таких как Состояние 1. Используйте Ожидание док-станции вместо Ожидание.
3. Ограничьте переходы
Слишком много пересекающихся линий делает диаграмму непонятной. Если состояние имеет слишком много переходов, рассмотрите возможность их группировки или использования составного состояния.
4. Документируйте условия-ограничения
Всегда записывайте точное условие для перехода. Не пишите просто «Ошибка»; напишите “[Флаг ошибки == Истина]”.
5. Контроль версий
Даже если вы не используете программное обеспечение, относитесь к своим диаграммам как к коду. Храните версии. Если вы меняете логику, укажите, что изменилось и почему.
🔄 Параллелизм в робототехнике
Некоторые роботы выполняют несколько задач одновременно. Хотя базовые конечные автоматы последовательны, продвинутые конструкции обрабатывают параллелизм. Это означает, что робот может находиться в нескольких состояниях одновременно.
Пример: мониторинг и движение
Робот может находиться в состоянии патрулирования одновременно с этим мониторинга датчиков. В диаграмме это часто представляется параллельными областями.
- Область 1: Управление движением (патрулирование, остановка).
- Область 2: Мониторинг датчиков (прослушивание, сканирование).
Изменения в области 2 не обязательно останавливают область 1. Это добавляет сложность диаграмме, но необходимо для продвинутой автономии.
🧩 Интеграция с кодом
Как вы превращаете эту диаграмму в рабочее программное обеспечение? Диаграмма служит спецификацией.
1. Перечисления
Сопоставьте каждое состояние с перечислением в вашем коде. Это предотвращает опечатки в именах состояний.
2. Операторы switch/case
Используйте переменную состояния для переключения между различными блоками логики. Это отражает визуальную структуру диаграммы.
3. Очереди событий
События должны храниться в очереди. Основной цикл обрабатывает одно событие за раз, запуская соответствующий переход на основе текущего состояния.
📈 Масштабирование вашей логики
По мере роста вашего проекта робота конечный автомат также будет расти. Вам может понадобиться рефакторинг диаграммы.
- Модульность: Выделите общие поведения в отдельные конечные автоматы, которые можно будет использовать на разных роботах.
- Абстракция: Скройте низкоуровневые детали. Высокоуровневая конечная автомат должна заниматься Перемещение, а не Скорость двигателя.
- Циклы обзора: Регулярно обсуждайте диаграмму с вашей командой, чтобы убедиться, что она соответствует текущей реализации.
🔧 Устранение распространённых проблем
Даже при наличии хорошей диаграммы могут возникать проблемы с реализацией.
Проблема: гонки условий
Если два события происходят почти одновременно, робот может непредсказуемо реагировать. Используйте очередь событий, чтобы обеспечить строгий порядок обработки.
Проблема: бесконечные циклы
Конечный автомат может бесконечно циклически переключаться между двумя состояниями, не выполняя работы. Убедитесь, что переходы имеют условия-ограничения, которые в конечном итоге станут истинными.
Проблема: несоответствие состояний
Код может находиться в другом состоянии, чем предполагает диаграмма. Добавьте логирование в точки входа и выхода каждого состояния, чтобы проверить синхронизацию.
🎓 Основные выводы
Проектирование конечного автомата для робототехники — это вопрос ясности и контроля. Это заставляет вас думать обо всех возможных условиях до написания кода.
- Начните с чёткого определения состояний и событий.
- Используйте диаграммы для визуализации потока до написания кода.
- Явно обрабатывайте ошибки с помощью выделенных состояний.
- Держите состояния простыми и атомарными.
- Тестируйте логику на бумаге перед развертыванием.
- Используйте таблицы для дополнения сложных переходов.
Овладев структурой диаграмм конечных автоматов, вы создадите основу для надежных и стабильных робототехнических систем. Такой подход снижает количество ошибок и значительно упрощает сопровождение при будущих обновлениях.
