











No domínio de sistemas embarcados e robótica autônoma, gerenciar comportamentos complexos exige mais do que declarações condicionais simples. Um Diagrama de Máquina de Estados bem definido oferece uma abordagem estruturada para modelar o comportamento dinâmico de um sistema. Este guia apresenta um estudo de caso abrangente focado no projeto da lógica de controle de um drone autônomo usando princípios de Máquina de Estados UML. Exploraremos como definir estados, gerenciar transições, lidar com eventos e garantir uma operação robusta sob restrições do mundo real.
Compreendendo Diagramas de Máquina de Estados em UML 📐
Um Diagrama de Máquina de Estados, frequentemente referido como Diagrama de Gráfico de Estados em UML 2.0, representa os estados discretos de um objeto ou sistema e as transições entre esses estados. Diferentemente de um diagrama de classe estático, esse modelo captura o comportamento temporal do sistema. É particularmente útil para sistemas reativos, onde a saída depende do estado atual e dos eventos recebidos.
Os componentes principais incluem:
- Estado: Uma condição ou situação durante a vida de um objeto durante a qual ele satisfaz alguma condição, realiza alguma atividade ou aguarda algum evento.
- Transição: Uma relação entre dois estados que indica que objetos no primeiro estado passarão para o segundo estado quando um evento específico ocorrer e certas condições forem atendidas.
- Evento: Uma ocorrência significativa, como a recepção de um sinal, a passagem de tempo ou uma exceção, que dispara uma transição.
- Condição de Guarda: Uma expressão booleana que deve ser verdadeira para que a transição ocorra.
- Ação: Um cálculo ou atividade realizada ao entrar, sair ou durante uma transição.
Usar essa notação permite que engenheiros visualizem o fluxo de controle sem se perder na sintaxe do código. Serve como um projeto para a implementação, garantindo que todos os comportamentos possíveis do sistema sejam considerados antes de escrever uma única linha de código executável.
O Estudo de Caso: Drone de Entrega Autônomo 🚁
Considere um drone quadracóptero projetado para entrega de pacotes na última milha em um ambiente urbano. Este sistema deve operar de forma autônoma, mas exige supervisão humana para eventos críticos específicos. O drone é equipado com GPS, sistemas de gerenciamento de bateria, sensores de evitação de obstáculos e um módulo de comunicação. A lógica de controle deve lidar com operações normais, navegação e diversos modos de falha.
O desafio de projeto envolve garantir que o drone não tente decolar com bateria baixa, não perca a conexão sem retornar para casa e pouse com segurança em caso de emergência. Um script linear seria difícil de manter e propenso a condições de corrida. Uma Máquina de Estados fornece uma hierarquia clara de operações.
Definindo os Estados Principais ⚙️
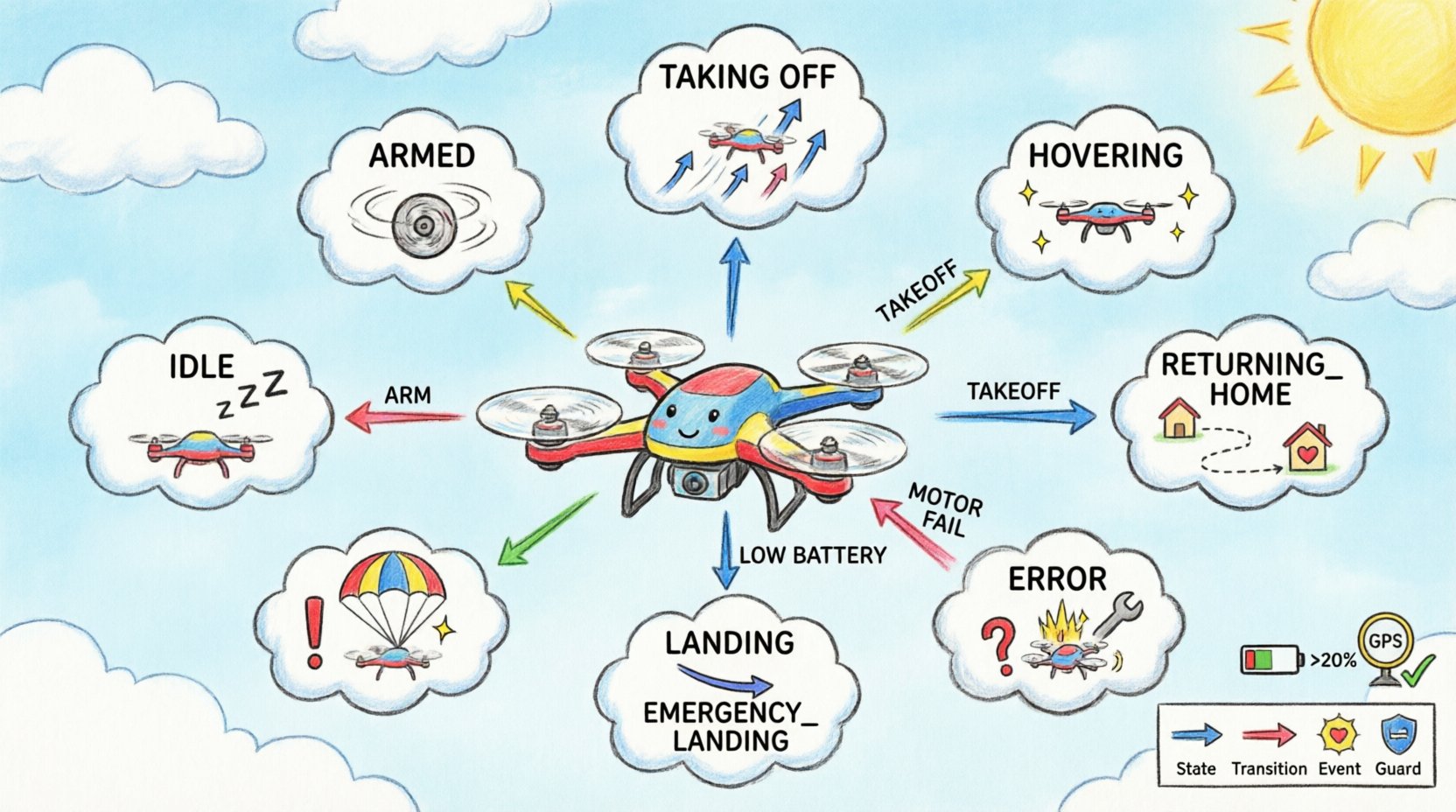
O primeiro passo no processo de design é identificar os modos distintos de operação. Para este drone, definimos os seguintes estados principais. Cada estado representa uma fase específica da missão.
- IDLE: O drone está ligado, mas não armado. Ele aguarda um comando para iniciar a missão.
- ARMADO: Os motores estão girando, e o drone está pronto para decolar. Ele ainda não está no ar.
- DECOLANDO: O drone está subindo do solo até uma altitude estável de suspensão.
- SUSPENSO: O drone está parado no ar, mantendo sua posição.
- NAVEGANDO: O drone está se movendo ativamente entre pontos de navegação para entregar a carga.
- RETORNANDO PARA A BASE: O drone está retornando ao local de lançamento devido à bateria baixa ou perda de sinal.
- POUSO: O drone está descendo do ar até o solo.
- POUSO DE EMERGÊNCIA: Uma descida imediata e forçada devido a falha crítica (por exemplo, falha no motor).
- ERRO: Um estado genérico para falhas não tratadas ou reinícios do sistema.
Observe que estados como PARADO e ERRO são estados terminais ou quase terminais. Assim que o sistema entra em ERRO, não pode prosseguir para NAVEGANDO sem uma reinicialização manual. Isso evita que o drone tente voar enquanto estiver em condição de falha.
Lógica de Transição e Gatilhos de Eventos 📡
As transições definem como o sistema se move entre os estados listados acima. Esses movimentos são acionados por eventos como entrada do usuário, leituras de sensores ou temporizadores internos. A tabela abaixo descreve as transições críticas necessárias para a lógica de controle.
| Evento | Estado de Origem | Estado Alvo | Condição de Guarda |
|---|---|---|---|
| COMANDO_DE_ARMAMENTO | PARADO | ARMADO | Bateria > 20% |
| DECOLAGEM_CONCLUIDA | ARMADO | DECOLANDO | Sensor de Altitude Ativo |
| ATINGINDO O VOO SUSPENSO | DECOLANDO | VOANDO SUSPENSO | Altitude = 1,5m |
| INICIAR MISSÃO | VOANDO SUSPENSO | NAVIGANDO | Bloqueio do GPS = Verdadeiro |
| BATERIA BAIXA | NAVIGANDO | RETORNANDO PARA CASA | Bateria < 30% |
| PERDA DE SINAL | NAVIGANDO | RETORNANDO PARA CASA | Tempo > 5s sem sinal |
| ATINGINDO A CASA | RETORNANDO PARA CASA | POUSO | Distância = 0m |
| TOQUE NO SOLO | POUSO | PARADO | Altitude = 0m |
| FALHA NO MOTOR | Qualquer | POUSO DE EMERGÊNCIA | Corrente < 0A |
Observe que o FALHA_DO_MOTOR evento tem um estado de origem de Qualquer. Isso é conhecido como uma transição ortogonal ou uma interrupção. Independentemente de o drone estar PARADO ou NAVIGANDO, uma falha crítica no motor força uma mudança imediata de estado para POUSO_EM_EMERGÊNCIA. Isso garante que a segurança seja priorizada em relação à continuidade da missão.
Condições de Guarda e Ações 🛑
As transições nem sempre são incondicionais. As condições de guarda atuam como verificações de segurança. Por exemplo, um usuário não pode iniciar uma sequência de decolagem se a bateria estiver criticamente baixa. A condição de guarda Bateria > 20% impede a transição de PARADO para ARMADO.
Além disso, as transições frequentemente acionam ações. Essas ações são executadas quando a transição ocorre ou enquanto se está em um estado específico.
- Ação de Entrada: Código executado imediatamente ao entrar em um estado. Para o estado DECOLANDO estado, uma ação de entrada pode ser definir o empuxo do motor em 60% e inicializar o controlador PID de altitude.
- Ação de Saída: Código executado imediatamente ao sair de um estado. Ao sair do estado SUSPENSO, o sistema pode parar o seguidor de pontos de caminho para evitar comandos conflitantes.
- Atividade de Execução: Código executado continuamente enquanto se está em um estado. No estado NAVEGANDO estado, um FaçaA atividade envolve ler continuamente dados do GPS e ajustar as velocidades dos motores para manter a trajetória de voo.
Considere o RETORNANDO_PARA_DOMICÍLIOestado. Ao entrar, o drone deve calcular o vetor de volta ao ponto de origem. Ao sair, deve limpar o vetor de retorno. Isso garante que, se o drone voltar a NAVEGANDO (talvez porque o usuário recuperou o controle), a lógica de retorno não interfere na lógica da missão.
Design de Estado Hierárquico (Estados Compostos) 🏗️
Máquinas de estado planas podem se tornar difíceis de gerenciar à medida que a complexidade aumenta. Máquinas de estado hierárquicas permitem que estados contenham subestados. Isso é particularmente útil para o NAVEGANDOestado. Navegação não é uma única ação; é uma coleção de comportamentos.
Podemos definir NAVEGANDOcomo um estado composto com os seguintes subestados internos:
- SEGUINDO_PONTOS_DE_PASSAGEM:O modo padrão em que o drone se move entre pontos.
- EVITANDO_COLISÕES:Um estado entrado quando um obstáculo é detectado.
- ESTABILIZAÇÃO:Um estado de baixo nível que gerencia o equilíbrio dos motores durante rajadas de vento.
As transições entre esses subestados ocorrem sem sair do estado pai NAVEGANDOestado. Por exemplo, se um obstáculo for detectado, o sistema transita de SEGUINDO_PONTOS_DE_PASSAGEMpara EVITANDO_COLISÕES. O estado pai permanece ativo, preservando o contexto geral da missão. Assim que o obstáculo for eliminado, o sistema volta a SEGUINDO_PONTOS_DE_PASSAGEM.
Esta estrutura reduz a redundância. Ações comuns para navegação, como atualizar os registros de telemetria, podem ser definidas no nível pai em vez de repeti-las em cada subestado. Isso também melhora a clareza ao agrupar visualmente comportamentos relacionados.
Considerações de Implementação para Sistemas Embarcados 💻
Traduzir um diagrama de máquina de estados em código executável exige atenção às restrições do hardware embarcado. O controlador de voo do drone geralmente opera em um microcontrolador com memória RAM e ciclos de CPU limitados.
- Eficiência de Memória:Evite armazenar todo o histórico de estados. Apenas acompanhe o estado atual. Usar uma enumeração ou inteiro para representar o estado minimiza o uso de memória.
- Responsividade em Tempo Real: As transições devem ocorrer de forma determinística. Se o EMERGENCY_LANDING evento for acionado, o código não deve esperar pela conclusão de uma tarefa de longa duração. Interrupções devem ser tratadas fora do loop principal de estados ou com alta prioridade.
- Consistência de Estado: Certifique-se de que nenhum estado tenha comportamento indefinido. Todo evento possível deve ter uma transição definida. Se ocorrer um evento inesperado, o sistema deve transitar para um estado de ERROR estado em vez de travar ou parar.
- Registro: Implemente um mecanismo de registro de estado. Quando ocorrer uma transição, grave a marca de tempo, o estado de origem, o estado de destino e o evento na memória não volátil. Isso é crucial para a análise pós-voo.
Por exemplo, ao implementar o estado de TAKING_OFF estado, o código não deve bloquear. Deve usar um temporizador não bloqueante para monitorar a altitude. Se a altitude não aumentar dentro de um tempo definido, deve disparar um evento de timeout e transitar para ERROR.
Estratégias de Teste e Verificação 🧪
Antes de implantar o drone, a lógica da máquina de estados deve ser verificada. A simulação é o método mais rentável. Criando um simulador de software que imita as entradas dos sensores, os engenheiros podem testar todos os caminhos possíveis no diagrama de estados sem correr riscos com o hardware.
As principais atividades de teste incluem:
- Teste de Fronteira: Teste transições que dependem de limiares específicos. Por exemplo, verifique que a transição para RETURNING_HOME ocorre exatamente quando a bateria cai abaixo de 30%, e não em 29% ou 31%.
- Cobertura de Caminho: Certifique-se de que cada linha de transição no diagrama seja percorrida pelo menos uma vez durante o teste. Isso confirma que a lógica para cada evento é funcional.
- Teste de Interrupção: Simule eventos que deveriam interromper o estado atual. Verifique se o sistema sai corretamente NAVIGANDO e entra em POUSO_EMERGENCIAL mesmo que um cálculo longo esteja em execução.
- Teste de Reinicialização: Verifique se o sistema pode se recuperar do estado ERRO estado. Ele pode ser reiniciado manualmente para IDLE sem um ciclo físico de energia?
Ferramentas de verificação de modelo também podem ser utilizadas. Essas ferramentas verificam matematicamente se a máquina de estados não contém travamentos (estados onde nenhuma transição é possível) ou estados inacessíveis (estados que não podem ser alcançados a partir do estado inicial).
Armadilhas Comuns para Evitar ⚠️
Mesmo com um diagrama bem projetado, erros de implementação podem ocorrer. Abaixo estão problemas comuns observados em sistemas de controle de drones.
- Transições Ausentes: É fácil esquecer uma transição para um evento específico. Por exemplo, o que acontece se a bateria falhar enquanto está em POUSO_EMERGENCIAL? O drone ainda deve executar uma descida controlada ou lógica de proteção contra queda livre.
- Confusão de Estados: Usar muitos estados semelhantes. Por exemplo, ter tanto SUSPENSO quanto AGUARDANDO pode ser confuso. Combine-os se seus comportamentos forem idênticos.
- Operações Bloqueantes: Não use código bloqueante dentro de uma ação de estado. Se uma ação espera por um sensor, toda a máquina de estados fica congelada. Use callbacks assíncronos ou flags em vez disso.
- Loops Indesejados: Certifique-se de que não existam loops infinitos de estados que consumam ciclos da CPU sem realizar trabalho útil. Por exemplo, um loop entre ERRO e IDLE sem um comando de reinicialização causará um travamento.
Resumo dos Benefícios 🏆
Projetar um sistema de controle de drone usando um Diagrama de Máquina de Estados oferece vantagens significativas em comparação com a programação procedural tradicional. Ele impõe uma separação clara de responsabilidades, tornando o código mais fácil de ler e depurar. Ao definir explicitamente estados e transições, os desenvolvedores garantem que o sistema se comporte de forma previsível em todas as situações.
Esta abordagem facilita a colaboração entre equipes de hardware e software. O diagrama serve como uma linguagem compartilhada. Engenheiros de hardware podem ver exatamente quando os sensores são lidos, e engenheiros de software podem ver quando os atuadores são comandados. Também simplifica a integração de novos membros da equipe, pois a lógica é visualizada em vez de estar escondida em estruturas de código complexas.
Em última análise, o investimento em projetar uma máquina de estados robusta se traduz em confiabilidade. Um drone autônomo é um sistema complexo, e gerenciar seu comportamento exige uma metodologia disciplinada. Ao seguir padrões UML e planejar cuidadosamente transições, guardas e ações, engenheiros podem construir sistemas que são seguros, fáceis de manter e eficientes. Este estudo de caso demonstra que, embora a lógica seja complexa, a estrutura oferece clareza e controle sobre o comportamento autônomo.
