











Pemrograman robotik melibatkan pengelolaan interaksi kompleks antara sensor, aktuator, dan logika pengambilan keputusan. Ketika robot beroperasi secara otonom, ia harus menangani berbagai kondisi tanpa campur tangan manusia. Mesin status hingga (FSM) menyediakan metode terstruktur untuk memodelkan perilaku ini. Panduan ini membahas diagram mesin status UML secara khusus untuk konteks robotik, membantu Anda memvisualisasikan logika tanpa bergantung pada alat perangkat lunak tertentu.
🧠 Mengapa Menggunakan Mesin Status dalam Robotik?
Sistem robot sering beroperasi dalam lingkungan di mana input berubah secara tak terduga. Skrip linier tidak dapat dengan mudah menangani skenario di mana robot harus berhenti sejenak, menunggu sensor, melanjutkan, atau berhenti karena kesalahan. Mesin status memecah perilaku menjadi diskret keadaan. Pada setiap saat tertentu, robot berada dalam satu keadaan tertentu, dan transisi terjadi ketika terjadi peristiwa terjadi.
Menggunakan diagram untuk memetakan logika ini menawarkan beberapa manfaat:
- Kejelasan:Representasi visual lebih mudah ditinjau daripada baris-baris kode.
- Modularitas:Perilaku kompleks dapat dijadikan bagian dalam keadaan induk.
- Pembuatan debug:Lebih mudah melacak alur kontrol ketika logika divisualisasikan.
- Keamanan:Keadaan kritis seperti ‘Hentikan Darurat’ didefinisikan dengan jelas dan sulit dilewatkan.
📐 Komponen Utama Diagram Mesin Status
Untuk membuat diagram, Anda harus memahami blok bangunan dasar. Elemen-elemen ini membentuk kosakata desain Anda.
1. Keadaan (🟦)
Sebuah keadaan mewakili kondisi di mana robot melakukan tugas tertentu atau menunggu kondisi tertentu. Keadaan biasanya digambarkan sebagai persegi panjang melengkung.
- Keadaan Awal: Titik awal, sering berupa lingkaran kecil yang terisi.
- Keadaan Akhir:Titik akhir, biasanya berupa lingkaran ganda.
- Keadaan Sederhana:Kondisi tunggal (misalnya, Diam, Sedang Diisi).
- Status Komposit: Suatu status yang berisi sub-status (misalnya, Navigasi yang berisi IkutiGaris dan HindariRintangan).
2. Transisi (➡️)
Sebuah transisi mendefinisikan bagaimana sistem berpindah dari satu status ke status lainnya. Ini diwakili oleh garis dengan ujung panah.
- Pemicu: Kejadian yang menyebabkan perpindahan (misalnya, Tombol Ditekan, Rintangan Terdeteksi).
- Kondisi Penjaga: Ekspresi boolean yang harus benar agar transisi terjadi (misalnya, [Baterai > 20%]).
- Aksi: Kode yang dieksekusi selama transisi (misalnya, Catat Kesalahan, Reset Sensor).
3. Kejadian dan Sinyal (📡)
Kejadian adalah peristiwa yang memicu transisi. Dalam robotika, ini sering berasal dari:
- Masukan sensor (LiDAR, Kamera, Sentuhan).
- Timer internal (Waktu habis).
- Perintah eksternal (Antarmuka pengguna, Kendali jarak jauh).
🛠️ Merancang Pengendali Robot: Langkah demi Langkah
Mari kita bahas langkah-langkah merancang mesin keadaan untuk robot bergerak otonom yang bertugas melakukan patroli di gudang. Kita tidak akan menggunakan perangkat lunak gambar; kita akan mendefinisikan logika secara konseptual, lalu mengstrukturisasikannya.
Langkah 1: Tentukan Titik Masuk
Setiap program dimulai dari suatu tempat. Bagi robot, ini sering kali adalahUrutan Boot. Selama keadaan ini, sistem menginisialisasi perangkat keras, memeriksa koneksi, dan memuat file konfigurasi.
Langkah 2: Identifikasi Keadaan Operasional Utama
Setelah dihidupkan, apa saja mode utamanya? Pertimbangkan hal berikut:
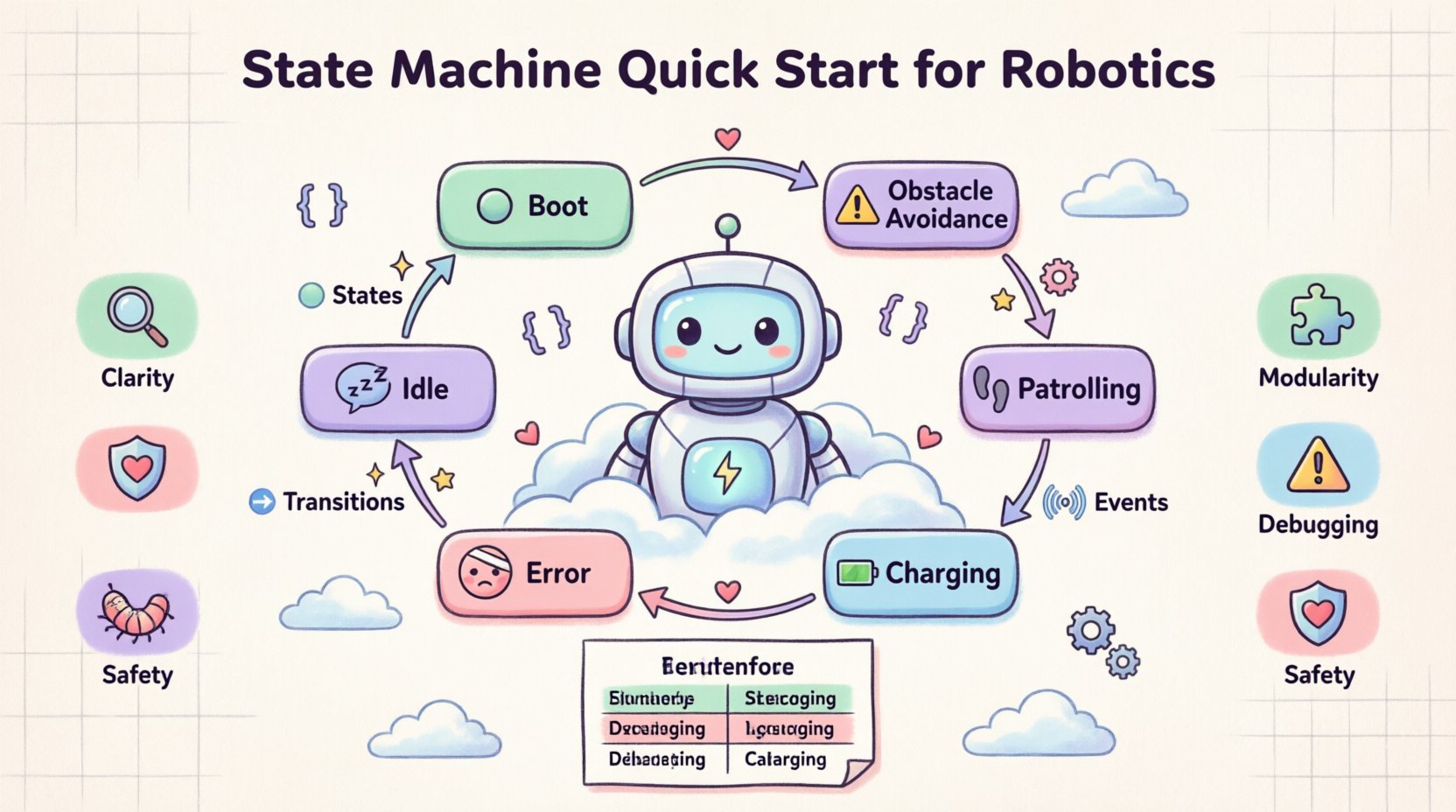
- Menganggur:Robot berada dalam posisi diam, menunggu perintah.
- Patroli:Robot bergerak mengikuti jalur yang telah ditentukan sebelumnya.
- Menghindari Hambatan:Robot mendeteksi suatu objek dan bergerak menghindarinya.
- Pengisian daya:Robot kembali ke dermaga untuk mengisi daya.
- Kesalahan:Kesalahan sistem terdeteksi; robot berhenti.
Langkah 3: Peta Transisi
Hubungkan keadaan berdasarkan alur logis. Sebagai contoh:
- Dari Menganggur:Berpindah kePatroli ketikaPerintah Mulai diterima.
- Dari Patroli:Berpindah keHindari Hambatan ketika Sensor Jarak memicu.
- Dari Hindari Hambatan: Transisi kembali ke Patroli ketika Jalur Bebas.
- Dari Setiap Status: Transisi ke Sedang Mengisi Daya ketika Baterai Rendah.
- Dari Setiap Status: Transisi ke Kesalahan ketika Kerusakan Sistem.
📊 Tabel Transisi Status
Sebuah tabel dapat melengkapi diagram untuk mendefinisikan logika secara tepat. Ini sering lebih mudah dibaca daripada diagram visual yang rumit untuk sistem yang sederhana.
| Status Saat Ini | Kejadian / Kondisi | Status Berikutnya | Tindakan |
|---|---|---|---|
| Diam | Perintah Mulai | Patroli | Inisialisasi Jalur, Aktifkan Motor |
| Patroli | Rintangan Terdeteksi | Hindari Rintangan | Berhenti, Pindai, Putar |
| Hindari Rintangan | Jalur Bebas | Patroli | Lanjutkan Jalur |
| Patroli | Baterai < 20% | Sedang Diisi Daya | Berhenti, Temukan Dering, Dock |
| Sedang Diisi Daya | Baterai > 90% | Idle | Putuskan Koneksi, Kembali ke Awal |
| Semua Status | Hentikan Darurat | Kesalahan | Putuskan Daya ke Motor, Catat Kejadian |
🔄 Menangani Logika Kompleks dengan Status Hierarkis
Robot dunia nyata sering memiliki logika bersarang. Sebuah status tunggal bisa berisi beberapa sub-status. Ini dikenal sebagai Mesin Status Hierarkis.
Contoh: Status Navigasi
The Patrolistatus bisa menjadi status komposit. Di dalamnya, Anda mungkin memiliki:
- Sub-State: Bergerak Maju: Robot bergerak lurus.
- Sub-State: Berbelok: Robot menyesuaikan arah.
- Sub-State: Berhenti: Robot melambat.
Ketika robot berada di Patroli, secara teknis juga berada di salah satu sub-state ini. Ini memungkinkan Anda menentukan perilaku umum untuk state induk sambil tetap menyimpan detail spesifik di anak-anaknya.
⚠️ Penanganan Kesalahan dan State Keamanan
Robotika membutuhkan manajemen kesalahan yang kuat. Anda sebaiknya selalu memiliki state khusus untuk kegagalan. Ini memastikan sistem tidak berputar terus-menerus dalam kondisi buruk.
Pertimbangan Keamanan Utama
- Isolasi: State kesalahan harus mencegah eksekusi perintah gerakan.
- Visibilitas: State harus memicu peringatan (LED, Suara, Log).
- Pemulihan: Tentukan apakah sistem dapat pulih secara otomatis atau memerlukan intervensi manusia.
- Waktu habis: Jika transisi memakan waktu terlalu lama, paksa transisi ke state kesalahan.
Contoh: Waktu habis Motor
Jika robot berusaha bergerak tetapi encoder tidak mencatat gerakan selama 5 detik:
- Pemicu:Peristiwa Waktu Habis.
- Transisi: Dari Patroli ke Kesalahan.
- Aksi:Atur benderaKegagalan Motor.
🧪 Pemecahan Masalah dan Pengujian Logika Status
Setelah diagram digambar, bagaimana Anda memverifikasi apakah itu berfungsi? Anda tidak perlu IDE khusus untuk menguji logika di kertas terlebih dahulu.
1. Simulasi Pemantauan Langkah demi Langkah
Ambil pena dan lacak jalur pada diagram Anda. Berpura-puralah menjadi robot. Tanyakan:
- Bisakah saya mencapai setiap status?
- Apakah ada status yang tidak bisa saya tinggalkan (kemacetan)?
- Apa yang terjadi jika dua peristiwa terjadi pada waktu yang sama?
2. Analisis Cakupan
Pastikan setiap status memiliki setidaknya satu transisi masuk dan satu transisi keluar (kecuali awal dan akhir). Ini mencegah robot terjebak.
3. Pengujian Kasus Ekstrem
Pertimbangkan skenario yang tidak berada dalam alur utama:
- Kehilangan daya selama transisi.
- Kebisingan sensor (perubahan cepat peristiwa).
- Peristiwa berprioritas tinggi yang terjadi bersamaan.
🚀 Pola Umum dalam Robotika
Beberapa pola sering muncul dalam mesin status robotik. Mengenali pola-pola ini dapat mempercepat proses desain Anda.
Timer Pengawas
Sebuah timer yang hanya diatur ulang jika sistem berfungsi dengan benar. Jika timer habis waktu, maka memaksa transisi ke status aman (seperti Mulai Ulang).
Status Cadangan
Status umum yang digunakan ketika kondisi tertentu tidak terpenuhi. Misalnya, jika algoritma navigasi gagal, robot memasuki status Mencari Rumahstatus daripada mengalami kegagalan.
Status yang Dapat Menghentikan
Status yang mengganggu status lain. Status yangHentikan Darurat keadaan adalah keadaan pencegahan utama. Ini mengesampingkan Patroli, Sedang Mengisi Daya, atau Menganggur segera.
🛠️ Praktik Terbaik untuk Diagram
Ikuti panduan ini agar diagram Anda tetap dapat dipelihara dan jelas.
1. Pertahankan Keadaan sebagai Atom
Hindari membuat keadaan terlalu kompleks. Jika suatu keadaan mengandung terlalu banyak logika, pecah menjadi sub-keadaan yang lebih kecil. Suatu keadaan harus mewakili apa yang sedang dilakukan robot, bukan bagaimana cara melakukannya secara rinci.
2. Gunakan Penamaan yang Jelas
Nama harus deskriptif. Hindari nama umum seperti Keadaan 1. Gunakan Menunggu Dukungan alih-alih Menunggu.
3. Batasi Transisi
Terlalu banyak garis yang saling bersilangan membuat diagram tidak dapat dibaca. Jika suatu keadaan memiliki terlalu banyak transisi, pertimbangkan untuk mengelompokkannya atau menggunakan keadaan komposit.
4. Dokumentasikan Kondisi Penjaga
Selalu tuliskan kondisi tepat untuk suatu transisi. Jangan hanya menulis “Kesalahan”; tulis “[Bendera Kesalahan == Benar]”.
5. Kontrol Versi
Meskipun Anda tidak menggunakan perangkat lunak, perlakukan diagram Anda seperti kode. Simpan versi. Jika Anda mengubah logika, catat apa yang berubah dan mengapa.
🔄 Kecocokan dalam Robotika
Beberapa robot melakukan beberapa tugas secara bersamaan. Meskipun mesin status dasar bersifat urutan, desain canggih menangani konkurensi. Ini berarti robot dapat berada dalam beberapa status sekaligus.
Contoh: Pemantauan dan Pergerakan
Sebuah robot mungkin sedang Patroli sementara secara bersamaan Memantau Sensor. Dalam diagram, ini sering diwakili oleh wilayah paralel.
- Wilayah 1: Kontrol Gerak (Patroli, Berhenti).
- Wilayah 2: Pemantauan Sensor (Mendengarkan, Memindai).
Perubahan di Wilayah 2 tidak selalu menghentikan Wilayah 1. Ini menambah kompleksitas pada diagram tetapi diperlukan untuk otonomi tingkat lanjut.
🧩 Integrasi dengan Kode
Bagaimana Anda mengubah diagram ini menjadi perangkat lunak yang berfungsi? Diagram ini berfungsi sebagai spesifikasi.
1. Enumerasi
Peta setiap status ke dalam enumerasi di kode Anda. Ini mencegah kesalahan ketik pada nama status.
2. Pernyataan Switch/Kasus
Gunakan variabel status untuk beralih antara blok logika yang berbeda. Ini mencerminkan struktur visual dari diagram.
3. Antrian Peristiwa
Peristiwa harus disimpan dalam antrian. Loop utama memproses satu peristiwa pada satu waktu, memicu transisi yang sesuai berdasarkan status saat ini.
📈 Mengembangkan Logika Anda
Saat proyek robot Anda berkembang, mesin status akan berkembang pula. Anda mungkin perlu merefaktor diagram Anda.
- Modularisasi: Ekstrak perilaku umum ke dalam mesin status terpisah yang dapat digunakan kembali di berbagai robot.
- Abstraksi: Sembunyikan detail tingkat rendah. Mesin status tingkat tinggi harus menangani Bergerak, bukan Kecepatan Motor.
- Siklus Tinjauan: Tinjau diagram secara rutin bersama tim Anda untuk memastikan sesuai dengan implementasi saat ini.
🔧 Mendiagnosis Masalah Umum
Bahkan dengan diagram yang baik, masalah implementasi tetap muncul.
Masalah: Kondisi Persaingan
Jika dua peristiwa terjadi hampir bersamaan, robot mungkin bereaksi secara tidak terduga. Gunakan antrian peristiwa untuk memastikan urutan pemrosesan yang ketat.
Masalah: Lingkaran Tak Hingga
Mesin status mungkin berulang antara dua status tanpa melakukan pekerjaan. Pastikan transisi memiliki kondisi penjaga yang akhirnya menjadi benar.
Masalah: Ketidaksesuaian Status
Kode mungkin berada dalam status yang berbeda dari yang disarankan diagram. Tambahkan pencatatan di titik masuk dan keluar setiap status untuk memverifikasi sinkronisasi.
🎓 Ringkasan Poin Penting
Mendesain mesin status untuk robotika adalah tentang kejelasan dan kendali. Ini mendorong Anda untuk memikirkan setiap kondisi yang mungkin sebelum menulis kode.
- Mulailah dengan definisi yang jelas mengenai status dan peristiwa.
- Gunakan diagram untuk memvisualisasikan alur sebelum pemrograman.
- Kelola kesalahan secara eksplisit dengan status khusus.
- Jaga status tetap sederhana dan atomik.
- Uji logika di kertas sebelum penyebaran.
- Gunakan tabel untuk melengkapi transisi yang kompleks.
Dengan menguasai struktur diagram mesin status, Anda membangun fondasi untuk sistem robotika yang kuat dan andal. Pendekatan ini mengurangi bug dan membuat pemeliharaan jauh lebih mudah untuk pembaruan di masa depan.
