











Los sistemas embebidos dependen en gran medida de un comportamiento determinista. Cuando un dispositivo opera, debe responder de forma predecible ante entradas dentro de condiciones específicas. Los diagramas de máquinas de estados, a menudo parte del Lenguaje Unificado de Modelado (UML), sirven como plano de este comportamiento. Sin embargo, es en la traducción de un diagrama a código donde a menudo se ocultan los errores. Los errores lógicos en máquinas de estados finitas (FSM) pueden provocar bloqueos del sistema, reinicios inesperados o riesgos para la seguridad. 🚨
Esta guía proporciona un enfoque estructurado para identificar y resolver errores lógicos dentro de los diseños de máquinas de estados. Al comprender los matices de las transiciones de estado, las condiciones de guarda y las estructuras jerárquicas, los desarrolladores pueden asegurarse de que su software embebido funcione según lo previsto.
🧩 Comprendiendo la complejidad de las FSM
Una máquina de estados define los estados posibles de un sistema y cómo se mueve entre ellos. En contextos embebidos, esto implica a menudo interacciones con hardware, temporizadores e interrupciones externas. A diferencia del código procedural simple, las máquinas de estados mantienen contexto. Si se pierde o corrompe el contexto, la lógica falla.
Escenarios comunes en los que las FSM son críticas incluyen:
- Protocolos de comunicación (por ejemplo, manejo de estados en UART, SPI, I2C)
- Navegación de interfaz de usuario (por ejemplo, pulsaciones de botón, transiciones de pantalla)
- Modos de gestión de energía (por ejemplo, suspensión, activo, espera)
- Secuencias de control de motores (por ejemplo, inicio, ejecución, parada, error)
Al solucionar problemas, es fundamental distinguir entre errores de implementación y defectos de diseño. Un defecto de diseño existe cuando el diagrama en sí mismo no cubre un escenario válido. Un error de implementación ocurre cuando el código no sigue el diagrama.
⚠️ Errores lógicos comunes en máquinas de estados embebidas
Depurar la lógica de estado requiere una atención aguda a los detalles. Algunos patrones de errores se repiten con frecuencia. Reconocer estos patrones acelera el proceso de resolución.
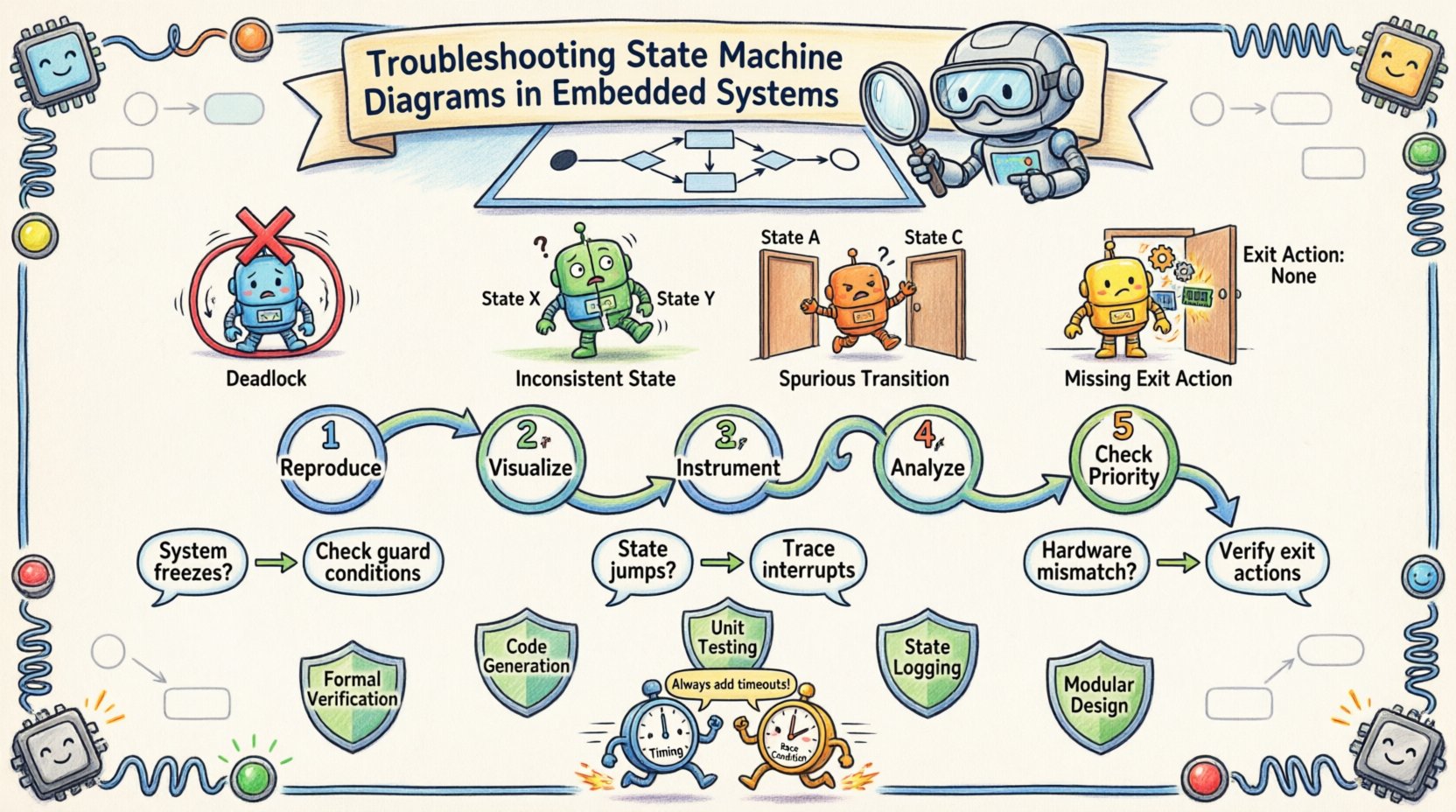
1. El escenario de bloqueo (deadlock)
Un bloqueo (deadlock) ocurre cuando el sistema entra en un estado donde no es posible ninguna transición, aunque el sistema no se encuentra en un estado terminal ni de error. El procesador permanece inactivo, esperando un evento que nunca llegará. Esto suele deberse a:
- Ausencia de transiciones predeterminadas (bucles sobre sí mismas) para eventos no manejados.
- Condiciones de guarda que siempre son falsas.
- Lógica que borra una bandera de evento antes de que la máquina de estados la verifique.
2. Transiciones espurias
Las transiciones espurias ocurren cuando el sistema pasa a un estado que no debería. Esto generalmente se debe a:
- Varios eventos que activan la misma ruta de transición sin una exclusión adecuada.
- Manejo incorrecto de colas de eventos donde un evento antiguo activa un nuevo estado.
- Estados concurrentes que no están correctamente sincronizados.
3. Estados inconsistentes
Esto ocurre cuando las variables internas no coinciden con el estado actual de la máquina. Por ejemplo, un motor podría estar en el estado «En ejecución» en el diagrama, pero el registro de hardware indica «Detenido». Esta desincronización genera confusión para las transiciones posteriores.
4. La acción de salida omitida
En máquinas complejas, salir de un estado a menudo requiere una limpieza. Si la acción de salida se omite en el código pero está presente en el diseño, los recursos (como memoria o bloques) permanecen asignados. Con el tiempo, esto conduce a la agotamiento de recursos.
📊 Tipos de errores frente a síntomas
Consulte la tabla siguiente para relacionar el comportamiento observado con posibles causas raíz.
| Síntoma observado | Causa raíz potencial | Enfoque del diagnóstico |
|---|---|---|
| El sistema se congela con una entrada específica | Muerte cruzada o transición faltante | Verifique la cola de eventos y las condiciones de guarda |
| El estado salta inesperadamente | Transición espuria o condición de carrera | Rastree el tiempo de interrupción y las banderas de evento |
| El hardware no coincide con el estado | Falta la acción de salida o actualización | Verifique los escritos en registros de hardware al salir |
| Fallas intermitentes bajo carga | Problema de temporización o condición de carrera | Analice el uso de la pila y los intervalos del temporizador |
| El sistema arranca en un estado incorrecto | Error de inicialización | Verifique el manejador de reinicio y el estado predeterminado |
🔍 Flujo de diagnóstico paso a paso
Cuando aparecen errores lógicos, un enfoque sistemático evita el desperdicio de tiempo. No adivine; mida.
1. Reproduzca el problema
Asegúrese de que el error sea reproducible. Si el problema es intermitente, intente aislar las condiciones. Documente la secuencia de eventos que llevan al fallo. Una máquina de estados es determinista; si activa la misma secuencia, debería obtener el mismo resultado.
2. Visualice el flujo
Abra el diagrama UML. Tracee el camino visualmente. Resalte el estado inicial y el estado objetivo. Busque brechas en el diagrama. ¿El diagrama considera todas las entradas posibles en cada estado? Si una entrada no está dibujada, el código podría estar ignorándola o manejándola incorrectamente.
3. Instrumente el código
Agregue registro en puntos clave de transición. Esto no requiere herramientas costosas. Instrucciones simples de impresión o conmutación de pines GPIO pueden revelar el estado del sistema en tiempo de ejecución. Registre lo siguiente:
- ID del estado actual
- Evento desencadenante
- Evaluación de la condición de guarda
- Estado objetivo
4. Analice la entrada y salida del estado
Verifique que las acciones de entrada y salida se están activando. A menudo, la transición tiene lugar, pero los efectos secundarios (como poner un pin en alto) no ocurren. Asegúrese de que la lógica de la máquina de estados actualice el hardware inmediatamente al entrar.
5. Verifique la priorización de eventos
Si ocurren múltiples eventos simultáneamente, ¿cuál tiene prioridad? El código debe definir una prioridad clara. Si el código da prioridad al Evento A pero el diseño espera el Evento B, la lógica se desviará.
🧠 Análisis profundo: condiciones de guardia y eventos de activación
Las condiciones de guardia son expresiones booleanas que deben ser verdaderas para que ocurra una transición. Son las puertas lógicas de la máquina de estados. Los errores aquí son sutiles porque la ruta de transición existe, pero la condición la impide.
Errores comunes en las condiciones de guardia
- Alcance de variables: La variable utilizada en la condición de guardia podría no actualizarse cuando se espera. Si una bandera se establece en una interrupción pero se lee en el bucle principal, surgen problemas de sincronización.
- Negación lógica: Un simple error tipográfico, como usar “
!=en lugar de “==, puede invertir todo el flujo lógico. - Efectos secundarios: Las condiciones de guardia generalmente deben ser de solo lectura. Si una condición de guardia modifica una variable global, crea cambios de estado ocultos que son difíciles de rastrear.
Matrices en el manejo de eventos
Los eventos son los desencadenantes. Pueden ser:
- Señales:Entradas asíncronas (por ejemplo, pulsación de botón).
- Temporizadores:Entradas periódicas (por ejemplo, tick del watchdog).
- Errores:Entradas excepcionales (por ejemplo, error de CRC).
Asegúrese de que la fuente del evento se limpie después del procesamiento. Si una bandera de evento permanece activa, la máquina de estados podría procesar el mismo evento dos veces, causando una transición espuria.
🏗️ Gestión de estados jerárquicos e herencia
Los sistemas complejos utilizan estados jerárquicos para reducir el desorden en los diagramas. Un estado padre contiene estados hijos. Las transiciones pueden ocurrir a nivel de padre, afectando a todos los hijos.
Problemas con la jerarquía
Al depurar estados jerárquicos, a menudo surge confusión sobre dónde reside realmente el estado.
- Transiciones implícitas: Pasar de un estado hijo a un estado hermano a menudo requiere salir del estado padre. Asegúrese de que las acciones de salida del padre se ejecuten correctamente.
- Puntos de entrada predeterminados: Cuando se entra en un estado padre, ¿cuál estado hijo está activo? Si no se define el estado hijo predeterminado, el sistema podría quedar en un estado indefinido.
- Transiciones locales frente a transiciones globales: Una transición definida en un estado hijo podría ser desencadenada por un evento manejado por el padre. Comprenda el alcance del evento.
Mejores prácticas para la jerarquía
- Minimice la profundidad de anidamiento. Las jerarquías profundas son difíciles de rastrear.
- Utilice estados predeterminados explícitos para todos los estados compuestos.
- Documente claramente el comportamiento de las acciones de salida del padre.
⏱️ Tiempo y condiciones de carrera
Los sistemas embebidos operan en tiempo real. Las máquinas de estados no son inmunes a los problemas de tiempo. Las condiciones de carrera ocurren cuando el resultado depende del tiempo relativo de los eventos.
Interrupción frente a bucle principal
Con frecuencia, los eventos de estado se generan en una rutina de servicio de interrupción (ISR), pero se procesan en el bucle principal. Si el bucle principal es lento, los eventos pueden acumularse. Si la ISR borra una bandera antes de que el bucle principal la verifique, se pierde datos.
Antirrebote de entradas
Los botones físicos rebotan. Si la máquina de estados interpreta una pulsación única como múltiples pulsaciones, recorrerá incorrectamente el diagrama de estados. Implemente la lógica de antirrebote dentro de la máquina de estados (por ejemplo, un estado de “Espera”) en lugar de depender únicamente del hardware.
Tiempo de espera
Cada estado que espera una entrada externa debe tener un tiempo de espera. Si un evento esperado no llega dentro de una duración especificada, el sistema debe pasar a un estado de error o recuperación. Esto evita el escenario de bloqueo mencionado anteriormente.
🛡️ Estrategias de prevención para un diseño robusto
Corregir errores es reactivo. Diseñar para evitarlos es proactivo. Las siguientes estrategias reducen la probabilidad de errores lógicos en proyectos futuros.
- Verificación formal: Cuando sea posible, utilice métodos formales para verificar la alcanzabilidad de estados. Esto garantiza que cada estado sea alcanzable y que no existan bloqueos.
- Generación de código: Genere código a partir del modelo del diagrama de estados. Esto reduce la brecha entre el diseño y la implementación, minimizando los errores humanos.
- Pruebas unitarias: Trate la máquina de estados como cualquier otro módulo. Escriba pruebas para cada estado y cada transición. Cubra tanto las rutas de éxito como las rutas de error.
- Registro de estados: Incluya un registrador de estados en el firmware. En el campo, estos datos pueden analizarse para reproducir problemas sin acceso físico.
- Diseño modular: Divida las máquinas de estados grandes en submáquinas más pequeñas e interactivas. Esto simplifica el modelo mental e aísla los fallos.
🧰 Herramientas y técnicas de análisis
Aunque las herramientas de software específicas varían, las técnicas de análisis subyacentes permanecen consistentes.
Análisis estático
Ejecuta el análisis estático en el código fuente. Busca:
- Bloques de código inaccesibles.
- Variables no utilizadas en la lógica de estado.
- Sombreado de variables que podrían ocultar valores de estado.
Análisis dinámico
Utiliza un depurador para avanzar paso a paso a través de las transiciones.
- Establece puntos de interrupción en las funciones de entrada y salida de estado.
- Observa de cerca la variable de estado durante la ejecución.
- Monitorea la cola de entrada para asegurarte de que los eventos se consuman en orden.
Pruebas de hardware en el bucle
Prueba la máquina de estados con señales de hardware reales. Las entradas simuladas a menudo omiten características eléctricas como el ruido o la latencia que provocan errores lógicos.
📝 Reflexiones finales sobre el mantenimiento
Mantener una máquina de estados requiere disciplina. A medida que cambian los requisitos, el diagrama debe actualizarse. Si el diagrama no se actualiza junto con el código, la deuda técnica se acumula rápidamente. Una máquina de estados que ya no coincide con su diagrama es una bomba de tiempo.
Las revisiones regulares de la lógica de estado son esenciales. Cuando se agrega una nueva característica, compárala con las transiciones existentes. ¿Conflicta con una ruta existente? ¿Introduce un nuevo bloqueo? Manteniendo la documentación de diseño actualizada y el código alineado, el sistema permanece estable.
Depurar la lógica embebida es un rompecabezas. Requiere paciencia, precisión y una comprensión profunda de la arquitectura del sistema. Siguiendo el enfoque estructurado descrito aquí, los desarrolladores pueden resolver errores lógicos de manera eficiente y construir sistemas embebidos confiables.
