











Thiết kế các hệ thống điều khiển đáng tin cậy cho robot đòi hỏi sự chính xác. Một lỗi logic duy nhất trong phần mềm có thể làm dừng hoạt động hoặc gây hư hại thiết bị. Máy trạng thái cung cấp một cách tiếp cận có cấu trúc để quản lý các hành vi phức tạp. Khi được triển khai đúng cách, chúng tăng cường tính dự đoán và khả năng bảo trì. Tuy nhiên, thiết kế không đúng có thể dẫn đến các rủi ro như kẹt hệ thống. Những tình trạng này làm đông cứng hệ thống, ngăn cản tiến trình tiếp theo.
Hướng dẫn này khám phá các thực hành tốt nhất về sơ đồ máy trạng thái UML. Trọng tâm là các bối cảnh phần mềm điều khiển robot. Chúng ta sẽ xem xét cách cấu trúc các chuyển tiếp, quản lý tài nguyên và xử lý tính đồng thời. Mục tiêu là đảm bảo độ bền mà không cần thiết phải phức tạp hóa.
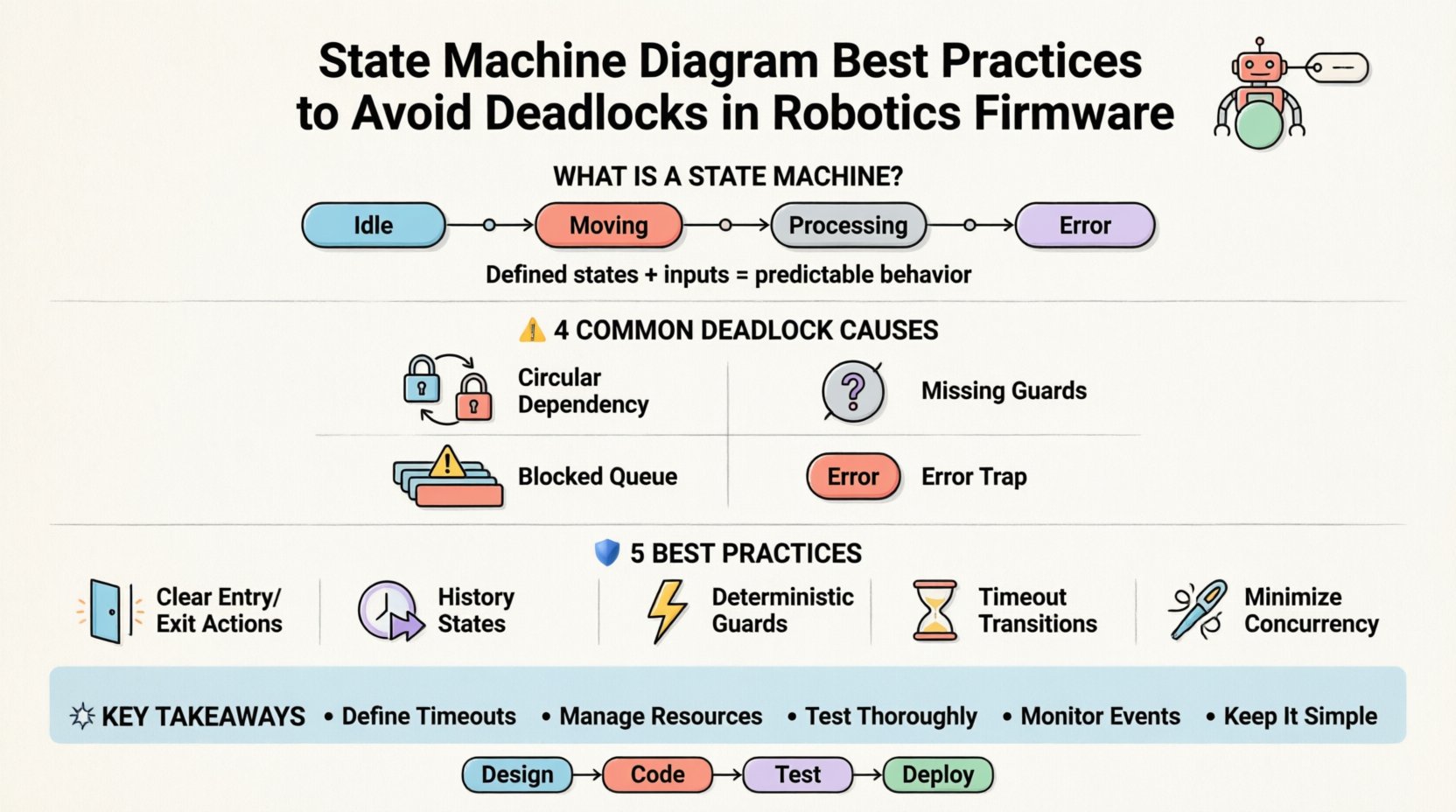
🧠 Hiểu về máy trạng thái trong robot
Một máy trạng thái là một mô hình toán học về tính toán. Nó mô tả một hệ thống di chuyển giữa các trạng thái được xác định dựa trên đầu vào. Trong robot, các đầu vào này thường đến từ cảm biến, lệnh người dùng hoặc bộ đếm thời gian nội bộ. Các trạng thái đại diện cho các chế độ hoạt động cụ thể, chẳng hạn như “Đang chờ”, “Đang di chuyển”, “Đang xử lý” hoặc “Lỗi”.
Tại sao lại sử dụng máy trạng thái?
- Rõ ràng:Các sơ đồ trực quan minh họa dòng logic một cách rõ ràng.
- Đầy đủ:Đảm bảo tất cả các tình huống đều được tính đến.
- Dễ bảo trì:Các thay đổi được giới hạn ở các trạng thái hoặc chuyển tiếp cụ thể.
- Gỡ lỗi:Dễ dàng theo dõi các đường dẫn thực thi trong trường hợp lỗi.
Tuy nhiên, các hệ thống nhúng có những giới hạn. Bộ nhớ bị giới hạn. Công suất xử lý là hữu hạn. Thời gian là yếu tố then chốt. Một tình trạng kẹt xảy ra khi hai hay nhiều trạng thái chờ đợi nhau vô thời hạn. Điều này thường xảy ra do các phụ thuộc vòng hoặc xung đột tài nguyên.
⚠️ Nguyên nhân phổ biến gây kẹt trong phần mềm
Trước khi áp dụng các biện pháp khắc phục, cần hiểu rõ nguyên nhân gốc rễ. Các tình trạng kẹt trong phần mềm robot thường xuất phát từ cách các sự kiện được xếp hàng và cách tài nguyên được cấp phát.
1. Phụ thuộc tài nguyên vòng lặp
Trạng thái A chờ tài nguyên đang được giữ bởi Trạng thái B. Trạng thái B chờ tài nguyên đang được giữ bởi Trạng thái A. Cả hai đều không thể tiến hành. Đây là tình huống kinh điển trong các kiến trúc đa luồng hoặc đa tiến trình.
2. Thiếu điều kiện bảo vệ chuyển tiếp
Nếu điều kiện chuyển tiếp không bao giờ được thỏa mãn, hệ thống sẽ mãi ở trong trạng thái đó. Điều này trông giống như một tình trạng kẹt đối với người vận hành, mặc dù về mặt kỹ thuật là một tình trạng treo logic.
3. Hàng đợi sự kiện bị chặn
Các sự kiện ưu tiên cao bị kẹt phía sau các sự kiện ưu tiên thấp. Nếu hàng đợi đầy, các sự kiện mới sẽ bị bỏ qua hoặc hệ thống bị chặn chờ không gian trống.
4. Xử lý lỗi không đúng cách
Khi xảy ra lỗi, máy sẽ chuyển sang trạng thái “Lỗi”. Nếu trạng thái này không có điều kiện thoát được xác định, robot sẽ ngừng phản hồi với mọi đầu vào.
🛡️ Các thực hành tốt nhất cho thiết kế sơ đồ
Thiết kế sơ đồ là tuyến phòng thủ đầu tiên. Mô hình trực quan phải được chuyển đổi thành mã nguồn mà không gây ra lỗi logic.
1. Xác định rõ các hành động vào và ra
Mỗi trạng thái nên có các hành vi được xác định khi vào và khi rời khỏi. Điều này đảm bảo tài nguyên được quản lý một cách nhất quán.
- Hành động vào: Khởi tạo biến, bắt đầu bộ đếm thời gian, hoặc kích hoạt cảm biến.
- Hành động thoát:Tắt bộ chấp hành, mở khóa, hoặc ghi lại dữ liệu.
- Tác động:Các hành động được thực hiện ngay lập tức khi chuyển trạng thái.
Ví dụ:
- Khi vào Chuyển độngtrạng thái: Kích hoạt bộ điều khiển động cơ.
- Khi thoát khỏi Chuyển độngtrạng thái: Tắt bộ điều khiển động cơ.
2. Sử dụng trạng thái lịch sử cho các tiểu máy phức tạp
Các robot phức tạp có các hành vi lồng ghép. Các vùng song song cho phép các quá trình độc lập chạy đồng thời. Các trạng thái lịch sử ghi nhớ trạng thái con hoạt động cuối cùng.
- Lịch sử sâu:Trở về trạng thái hoạt động sâu nhất.
- Lịch sử nông:Trở về trạng thái được nhập gần nhất ở cấp độ đó.
Điều này ngăn hệ thống trở về trạng thái mặc định mỗi khi tiểu máy được nhập lại, giảm độ trễ và các điều kiện cạnh tranh tiềm ẩn.
3. Điều kiện bảo vệ phải xác định rõ
Các điều kiện bảo vệ quyết định xem có chuyển trạng thái hay không. Chúng phải được đánh giá nhanh chóng và nhất quán. Tránh các phép tính phức tạp bên trong điều kiện bảo vệ.
- Xấu:Kiểm tra danh sách dài các giá trị cảm biến với các vòng lặp lồng nhau.
- Tốt:Kiểm tra một cờ logic được thiết lập bởi một tác vụ nền.
4. Thực hiện chuyển trạng thái thời gian chờ
Không có trạng thái nào nên chờ đợi vô hạn cho một sự kiện. Thời gian chờ đảm bảo tiến độ.
- Đặt thời gian tối đa cho một trạng thái.
- Xác định một chuyển trạng thái khi hết thời gian đến trạng thái lỗi hoặc trạng thái chờ.
- Điều này ngăn chặn việc treo do độ trễ mạng hoặc độ trễ cảm biến.
5. Tối thiểu hóa các vùng đồng thời
Các vùng đồng thời (trạng thái trực giao) rất mạnh mẽ nhưng cũng tiềm ẩn rủi ro. Nhiều vùng hơn có nghĩa là nhiều khả năng xảy ra lỗi đồng bộ hơn.
- Giữ các vùng độc lập với nhau mỗi khi có thể.
- Sử dụng phát sóng sự kiện một cách cẩn trọng.
- Tránh trạng thái thay đổi được chia sẻ giữa các vùng đồng thời.
🔄 Xử lý chuyển tiếp và sự kiện
Sự di chuyển giữa các trạng thái là nơi xảy ra hầu hết các lỗi logic. Thứ tự xử lý sự kiện có ý nghĩa quan trọng.
Ưu tiên sự kiện
Không phải mọi sự kiện nào cũng như nhau. Sự kiện lỗi phần cứng phải ưu tiên hơn sự kiện cập nhật trạng thái. Xác định các mức độ ưu tiên trong sơ đồ.
Kích hoạt chuyển tiếp
Đảm bảo mọi trạng thái đều có phản ứng được xác định đối với mọi sự kiện liên quan. Nếu một sự kiện bị bỏ qua, nó sẽ được xử lý như không thay đổi gì. Nếu một sự kiện không mong đợi, nó có thể dẫn đến hành vi không xác định.
Chuyển tiếp tự thân
Sử dụng chuyển tiếp tự thân (vẫn ở cùng một trạng thái) có thể hữu ích để xử lý thử lại hoặc vòng lặp. Tuy nhiên, tránh vòng lặp vô hạn trong một chuyển tiếp tự thân mà không có điều kiện thoát.
📊 So sánh các chiến lược chuyển tiếp
| Chiến lược | Ưu điểm | Nhược điểm | Rủi ro kẹt nghẽn |
|---|---|---|---|
| Thực thi ngay lập tức | Thời gian phản hồi nhanh hơn | Khó bị ngắt quãng hơn | Thấp |
| Thực thi hoãn | Cho phép ngắt quãng | Độ trễ cao hơn | Trung bình |
| Đợi xử lý sự kiện | Xử lý được các đợt sự kiện đột xuất | Tốn bộ nhớ | Cao (nếu hàng đợi bị chặn) |
| Dẫn động bởi ngắt | Phản hồi thời gian thực | Đồng bộ hóa phức tạp | Trung bình |
🧩 Quản lý tài nguyên và khóa
Firmware thường tương tác với các thiết bị ngoại vi phần cứng. Những tài nguyên này cần truy cập độc quyền để ngăn ngừa lỗi dữ liệu.
Phân bổ tài nguyên
Áp dụng các quy tắc nghiêm ngặt khi lấy khóa.
- Lấy khóa theo thứ tự nhất quán trong tất cả các trạng thái.
- Giải phóng khóa ngay lập tức sau khi sử dụng.
- Không bao giờ giữ khóa khi đang chờ tài nguyên khác.
Ma trận phòng ngừa kẹt vòng
Sử dụng ma trận để theo dõi các phụ thuộc tài nguyên.
- Liệt kê tất cả các trạng thái.
- Liệt kê tất cả các tài nguyên.
- Ghi chú trạng thái nào đang giữ tài nguyên nào.
- Xác định các chu trình trong đồ thị phụ thuộc.
Nếu tồn tại chu trình, thiết kế lại luồng trạng thái để phá vỡ nó.
🧪 Kiểm thử và xác thực
Thiết kế sơ đồ chỉ là một nửa công việc. Xác minh đảm bảo phần triển khai phù hợp với mô hình.
Kiểm thử mô hình trong vòng lặp
Chạy logic máy trạng thái trong môi trường mô phỏng trước khi triển khai lên phần cứng. Điều này cho phép kiểm thử tải mà không làm hỏng các thành phần vật lý.
Kiểm thử phần cứng trong vòng lặp
Kết nối firmware với môi trường vật lý được mô phỏng. Xác minh các giới hạn về thời gian và vòng phản hồi cảm biến.
Kiểm thử hỗn loạn
Tiêm các sự kiện ngẫu nhiên vào hệ thống. Quan sát xem máy trạng thái có xử lý các đầu vào bất ngờ một cách trơn tru hay bị sập hay không.
Ghi nhật ký và theo dõi
Thực hiện ghi nhật ký chi tiết cho các chuyển đổi trạng thái.
- Ghi thời điểm vào và ra.
- Ghi các sự kiện kích hoạt và kết quả chuyển đổi.
- Ghi lại việc cấp phát và giải phóng tài nguyên.
Dữ liệu này rất quan trọng để chẩn đoán các tình trạng kẹt ngắt quãng xảy ra chỉ trong những điều kiện cụ thể.
🔍 Phân tích các tình huống kẹt cụ thể
Hãy cùng xem các ví dụ cụ thể về những nơi mà mọi thứ có thể sai trong phần mềm điều khiển robot.
Tình huống 1: Chờ cảm biến
Trạng thái: Đang chờ dữ liệu Lidar.
Điều kiện:Chuyển trạng thái chỉ khi có “DataReceived”.
Vấn đề: Nếu cảm biến không gửi được dữ liệu, trạng thái sẽ không bao giờ thoát ra. Robot sẽ bị đóng băng.
Giải pháp: Thêm chuyển trạng thái thời gian chờ. Nếu “DataReceived” không đến trong vòng 5 giây, chuyển sang trạng thái “SensorError”.
Tình huống 2: Khóa động cơ
Trạng thái: Đang sạc pin.
Điều kiện: Chuyển sang “Idle” khi pin đầy.
Vấn đề: Sự kiện “BatteryFull” được tạo ra bởi mạch sạc. Bộ xử lý chính chưa bao giờ kiểm tra trạng thái thanh ghi.
Giải pháp: Đảm bảo trình xử lý ngắt gửi sự kiện vào hàng đợi máy trạng thái. Không nên phụ thuộc vào việc kiểm tra liên tục trong vòng lặp bận rộn.
Tình huống 3: Gọi lồng ghép
Trạng thái: Điều hướng.
Điều kiện: Gọi hàm con “PathPlanning”.
Vấn đề: “PathPlanning” bị chặn trong 10 giây. Máy trạng thái không thể xử lý các sự kiện khác trong khoảng thời gian này.
Giải pháp: Chuyển các tác vụ dài sang luồng nền. Gửi một sự kiện “PlanningComplete” đến máy trạng thái chính.
🔧 Mẫu triển khai mã hóa
Sơ đồ phải được ánh xạ rõ ràng sang mã nguồn. Một số mẫu tồn tại để đạt được điều này.
Mẫu Switch-Case
Sử dụng một vòng lặp chính chuyển đổi dựa trên biến trạng thái hiện tại. Điều này đơn giản nhưng có thể trở nên khó quản lý khi có nhiều trạng thái.
- Ưu điểm: Dễ đọc cho các máy đơn giản.
- Nhược điểm: Khó tái cấu trúc, dễ sai chính tả ở nhãn case.
Mẫu Đối tượng Trạng thái
Mỗi trạng thái là một lớp triển khai một giao diện chung. Vòng lặp chính gọi phương thức handle của trạng thái hiện tại.
- Ưu điểm: Gói gọn logic, dễ mở rộng.
- Nhược điểm: Tốn nhiều tài nguyên hơn, sử dụng nhiều bộ nhớ hơn.
Phương pháp điều khiển bằng bảng
Lưu các chuyển tiếp trong một bảng dữ liệu. Bộ xử lý tra cứu trạng thái tiếp theo dựa trên trạng thái hiện tại và sự kiện.
- Ưu điểm: Cấu hình cao, tách biệt dữ liệu khỏi logic.
- Nhược điểm: Gỡ lỗi có thể khó hơn, đòi hỏi bộ xử lý mạnh mẽ.
🛠️ Tối ưu hóa cho giới hạn nhúng
Phần mềm nhúng robot thường chạy trên vi điều khiển với RAM và CPU hạn chế.
Quản lý bộ nhớ
- Tránh phân bổ động cho các đối tượng trạng thái trong thời gian chạy.
- Phân bổ trước bộ đệm sự kiện khi khởi động.
- Sử dụng bộ đệm kích thước cố định cho chuỗi và nhật ký.
Sử dụng CPU
- Giữ các chuyển tiếp trạng thái nguyên tử.
- Tối thiểu hóa thời gian dành cho bộ xử lý chuyển tiếp.
- Chỉ sử dụng ngắt cho các sự kiện phần cứng, không dùng cho logic phần mềm.
📈 Bảo trì và phát triển
Robot phát triển. Yêu cầu thay đổi. Máy trạng thái phải thích nghi.
Kiểm soát phiên bản
Giữ sơ đồ trạng thái trong kiểm soát phiên bản cùng với mã nguồn. Điều này đảm bảo mô hình khớp với triển khai.
Tài liệu
Ghi chú vào sơ đồ bằng các nhận xét giải thích logic phức tạp. Không nên chỉ dựa vào sơ đồ mà thôi.
Tái cấu trúc
Khi thêm tính năng mới, hãy xem xét lại các trạng thái hiện có. Đảm bảo logic mới không tạo ra các đường dẫn chết mới.
🚀 Tóm tắt những điểm chính cần lưu ý
Xây dựng phần mềm điều khiển robot đáng tin cậy đòi hỏi thiết kế có kỷ luật. Máy trạng thái là một công cụ mạnh mẽ, nhưng lại đòi hỏi quản lý cẩn thận các sự kiện và tài nguyên.
- Xác định thời gian chờ:Không bao giờ để một trạng thái chờ mãi mãi.
- Quản lý tài nguyên:Tránh các phụ thuộc vòng tròn.
- Kiểm thử kỹ lưỡng:Sử dụng mô phỏng và kiểm thử ngẫu nhiên.
- Theo dõi các sự kiện:Đảm bảo tất cả đầu vào đều được xử lý.
- Giữ đơn giản:Giảm độ phức tạp ở mức có thể.
Bằng cách tuân theo các thực hành này, các nhà phát triển có thể tạo ra các hệ thống bền bỉ và có thể dự đoán được. Trọng tâm vẫn là chức năng và an toàn. Tránh các tình trạng chết máy đảm bảo robot hoàn thành nhiệm vụ mà không bị gián đoạn.
🔮 Những cân nhắc trong tương lai
Khi các hệ thống robot trở nên tự động hóa hơn, các máy trạng thái sẽ cần tích hợp với các lớp ra quyết định cấp cao hơn. Các mô hình học máy có thể đề xuất hành động, nhưng máy trạng thái vẫn phải là rào chắn an toàn.
- Đảm bảo các giao diện giữa trí tuệ nhân tạo và logic trạng thái được xác định rõ ràng.
- Cho phép hệ thống suy giảm một cách trơn tru nếu lớp trí tuệ nhân tạo thất bại.
- Vẫn tiếp tục ưu tiên hành vi xác định rõ ràng hơn là kết quả xác suất trong các đường đi then chốt.
Nền tảng của bất kỳ hệ thống mạnh mẽ nào là sự hiểu rõ rõ ràng về các trạng thái hoạt động của nó. Đầu tư thời gian vào giai đoạn thiết kế. Một sơ đồ được cấu trúc tốt sẽ mang lại lợi ích lớn trong thực tế.
📝 Ghi chú cuối cùng về triển khai
Hãy nhớ rằng sơ đồ là một hợp đồng. Nó định nghĩa cách hệ thống hoạt động trong mọi điều kiện. Hãy coi nó như vậy. Xem xét lại cùng đồng nghiệp. Đặt câu hỏi về các giả định. Kiểm thử các trường hợp biên. Sự cẩn trọng này chính là yếu tố phân biệt giữa các bản mô phỏng chức năng và phần mềm sẵn sàng sản xuất.
Khi xảy ra tình trạng chết máy, đừng vội cho rằng đó là lỗi phần cứng. Thường thì đó là lỗi logic. Xem lại các chuyển tiếp trạng thái. Kiểm tra các điều kiện bảo vệ. Xác minh luồng sự kiện. Giải pháp nằm ở thiết kế.
Việc áp dụng các thực hành tốt này dẫn đến các hệ thống dễ gỡ lỗi hơn, an toàn hơn khi vận hành và hiệu quả hơn khi bảo trì. Con đường dẫn đến độ tin cậy được lát bằng các trạng thái rõ ràng và các chuyển tiếp được xác định rõ ràng.
