











Robotik-Ingenieure beginnen die Architektur autonomer Systeme oft mit einem Gefühl der Sicherheit. Eine endliche Zustandsmaschine (FSM) oder ein UML-Zustandsmaschinen-Diagramm scheint der perfekte Bauplan für Steuerlogik zu sein. Sie ist sauber, visuell und auf Papier deterministisch. Wenn diese Diagramme jedoch in tatsächlichen Code umgesetzt werden, der auf physischer Hardware läuft, sind die Ergebnisse häufig enttäuschend. Systeme hängen sich auf, unerwartete Übergänge treten auf, und die Fehlersuche wird zur Qual. Der Bruch liegt nicht in der Designphilosophie selbst, sondern in den Annahmen über die Umgebung und die Ausführungsplattform. Dieser Leitfaden untersucht die spezifischen technischen Gründe, warum herkömmliche Zustandsmaschinen-Diagramme in der realen Robotik Schwierigkeiten haben, und wie Sie Ihren Ansatz anpassen können, um eine robuste Bereitstellung zu gewährleisten.
1️⃣ Die Illusion der Determinismus in physischen Systemen
In der theoretischen Informatik arbeitet eine Zustandsmaschine im Vakuum. Übergänge sind sofort erfolgt, und Eingaben sind perfekt synchronisiert. In der Robotik bringt die physische Welt jedoch Verzögerungen, Rauschen und Variationen mit sich. Ein Zustandsmaschinen-Diagramm geht typischerweise davon aus, dass, wenn der Roboter in Zustand A und Ereignis X eintritt, wechselt er in Zustand B. Diese Logik gilt in der Simulation, doch die Hardware bringt Variablen mit sich, die Diagramme selten erfassen.
- Signallaufzeit: Sensoren melden Daten nicht sofort. Ein Entfernungssensor könnte ein Hindernis 20 Millisekunden nach dem Aufprall melden. Die Zustandsmaschine erkennt das Ereignis zu spät, was möglicherweise eine Kollision verursacht, bevor die Übergangslogik ausgeführt wird.
- Ereignisreihenfolge: In einer mehrfädigen Umgebung könnten zwei Ereignisse gleichzeitig ausgelöst werden. Das Zustandsmaschinen-Diagramm zeigt sie normalerweise sequenziell, doch der Prozessor könnte sie in einer anderen Reihenfolge verarbeiten, was zu unerwarteten Zuständen führt.
- Hardware-Verschleiß: Ein Motor könnte mehr Strom ziehen, als erwartet, was einen Energieverwaltungs-Zustand unerwartet auslöst. Das Diagramm geht von normalen Betriebsbedingungen aus.
Um dies zu minimieren, müssen Sie die Zustandsmaschine nicht als absolute Wahrheit betrachten, sondern als eine abstrakte Oberfläche. Die Implementierungsebene muss Pufferung, Entprellung und Zeitüberprüfungen enthalten, die das visuelle Diagramm nicht explizit zeigt.
2️⃣ Konsurrenz und parallele Zustände 🔄
Eine der größten Einschränkungen grundlegender Zustandsmaschinen-Diagramme ist ihre lineare Natur. Robotikanwendungen sind inhärent konsurrent. Ein Roboter muss navigieren, während er gleichzeitig auf Not-Aus-Befehle hört, die Batterieladung überwacht und mit einer Basisstation kommuniziert. Traditionelle sequentielle Zustandsmaschinen zwingen Sie dazu, komplexe verschachtelte Zustände oder eine kombinatorische Explosion von Zuständen zu erstellen, um parallele Verhaltensweisen darzustellen.
Das hierarchische Problem
Wenn Sie versuchen, parallele Aktivitäten mit der Standard-UML-Hierarchie zu modellieren, wird das Diagramm unleserlich. Sie erhalten ein „Spaghetti-Diagramm“, bei dem jede Kombination aus Navigationsstatus und Batterieladung einen eindeutigen Zustand erfordert. Dieser Ansatz ist brüchig. Wenn Sie einen neuen Sensor oder ein neues Sicherheitsprotokoll hinzufügen, müssen Sie Dutzende von Zuständen neu schreiben.
Die Lösung: Orthogonale Bereiche
Fortgeschrittene Zustandsmaschinen-Implementierungen unterstützen orthogonale Bereiche. Dadurch kann das System mehrere unabhängige Zustandsmaschinen parallel ausführen. Zum Beispiel:
- Bereich 1:Navigation (Bewegung, Stopp, Hindernisvermeidung)
- Bereich 2:Energiemanagement (Laden, Niedrige Batterie, Normal)
- Bereich 3:Kommunikation (Verbunden, Getrennt, Synchronisieren)
Ohne diese Fähigkeit scheitert Ihr Diagramm, weil es die wahre Architektur des Systems nicht darstellen kann. Das visuelle Modell muss mit dem logischen Ausführungsmodell übereinstimmen. Wenn die Implementierung eine einzige Kontrollstrecke verwendet, ist das Diagramm eine Lüge.
3️⃣ Zeitplanung und Echtzeit-Beschränkungen ⏱️
UML-Zustandsmaschinen codieren Zeitbeschränkungen nicht natively. Sie beschreiben was passiert, nicht wannes passiert. In der Robotik ist die Zeitplanung oft wichtiger als die Logik. Eine Navigation-Zustandsmaschine könnte in den Zustand „Not-Aus“ wechseln, wenn ein Hindernis erkannt wird. Wenn die Erkennungslogik 100 Millisekunden dauert, hat sich das Roboters bereits erheblich bewegt.
Berücksichtigen Sie die folgenden Szenarien, bei denen die Zeitplanung die Diagrammstruktur beeinträchtigt:
- Zeitüberschreitungen: Eine Zustandsmaschine könnte unbegrenzt auf ein Signal warten. In der realen Welt ist das unendliche Warten ein Systemfehler. Timer müssen explizit sein.
- Abtastraten: Sensoren scannen in festen Intervallen. Ein Zustandswechsel könnte zwischen zwei Abtastzyklen ausgelöst werden, wodurch die Logik den Ereignis vollständig verpasst.
- Jitter: Die Betriebssystemplanung kann Verzögerungen verursachen. Eine Zustandsmaschine, die für eine Präzision von 1ms ausgelegt ist, wird versagen, wenn das zugrundeliegende Betriebssystem einen Jitter von 50ms einführt.
Effektive Diagramme für die Robotik müssen Zustände mit Zeitbedingungen versehen. Wenn ein Zustand ein Antwortfenster von 50ms erfordert, sollte das Diagramm diese Beschränkung widerspiegeln, auch wenn die Softwareimplementierung sie separat behandelt.
4️⃣ Fehlerbehandlung und Fehlertoleranz 🛑
Die meisten Zustandsmaschinen-Diagramme konzentrieren sich auf den glücklichen Pfad. Sie zeigen, wie das Roboters von Start zum Ziel gelangt. Selten wird gezeigt, was passiert, wenn der Arm-Motor ausfällt, die Wi-Fi-Verbindung abreißt oder die Batteriespannung unter sichere Werte fällt. In der Software sind Fehler Ausnahmen. In der Robotik sind Fehler der Standardzustand des Universums.
Fehlende Fehlerzustände
Wenn Ihr Diagramm die Ausfallzustände nicht explizit modelliert, ist Ihr System anfällig. Sie benötigen Zustände für:
- Sensorausfall: Was passiert, wenn der Lidar keine Daten mehr zurückgibt?
- Aktuatorblockierung: Was passiert, wenn ein Rad physisch blockiert ist?
- Logik-Zeitüberschreitung: Was passiert, wenn das Roboters in einer Schleife stecken bleibt?
Die Sicherheitsnetz
Robuste Systeme implementieren einen globalen Fehlerzustand, der von jedem Zustand aus erreicht werden kann. Dies wird oft als „Watchdog“ oder „Sicherheitsmodus“ bezeichnet. Wenn irgendein Logikzweig hängen bleibt oder ungültige Daten produziert, muss das System einen Übergang in diesen sicheren Zustand erzwingen. Ein Standarddiagramm versteckt dies oft hinter Implementierungsdetails, wodurch es für Stakeholder und zukünftige Wartende unsichtbar wird.
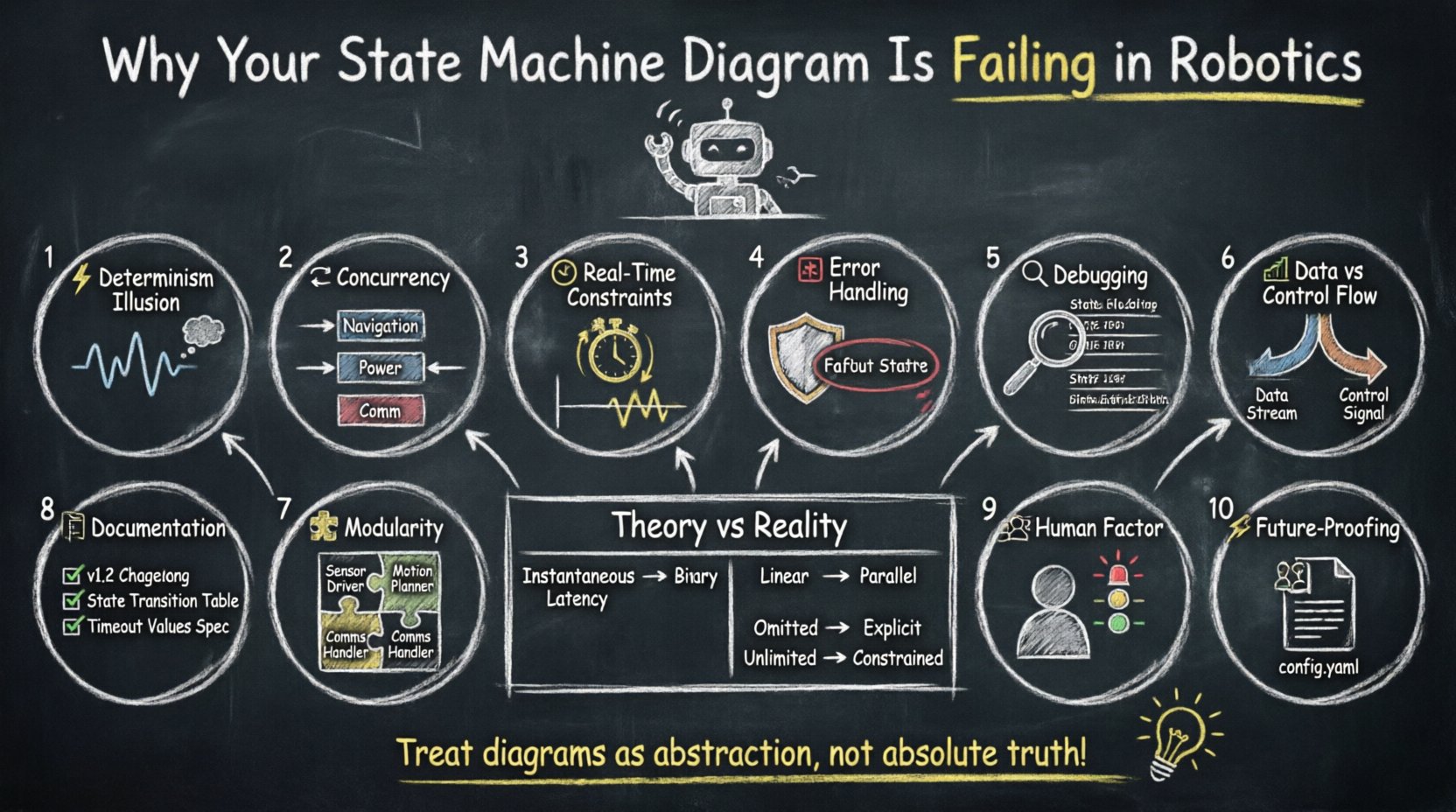
| Funktion | Theoretisches Diagramm | Realitätsnahe Implementierung |
|---|---|---|
| Übergänge | Sofortig | Abhängig von Latenz und Jitter |
| Eingaben | Binär (Wahr/Falsch) | Störende, analoge oder fehlende Daten |
| Konkurrenz | Linear oder geschachtelt | Parallele Threads und Prozesse |
| Fehler | Häufig weggelassen | Müssen explizit und priorisiert sein |
| Speicher | Unbegrenzt | Eingeschränkt durch eingebettete Hardware |
5️⃣ Herausforderungen bei Debugging und Visualisierung 🔍
Wenn eine Zustandsmaschine in der Produktion ausfällt, ist das Debugging schwierig. Standarddiagramme sind statische Dokumente. Sie zeigen nicht die Historie der Zustände. Sie zeigen nicht die Zeitpunkte von Ereignissen. Sie zeigen nicht die Datenwerte, die eine Übergangsbedingung ausgelöst haben.
Um Zustandsmaschinen im Robotikbereich debuggbar zu machen, benötigen Sie:
- Zustandsprotokollierung: Jeder Übergang sollte mit einem Zeitstempel und den Werten relevanter Variablen protokolliert werden.
- Geschichtszustände: Das Diagramm sollte „Geschichts“-Übergänge unterstützen. Wenn der Roboter im Zustand A war, zu Zustand B wechselte und dann Zustand B abgestürzt ist, sollte er wissen, zurück zu Zustand A zu gehen, nicht zu einem Standardzustand.
- Nachvollziehbarkeit: Der Code muss rückverfolgbar zum Diagramm sein. Wenn eine Übergangslogik komplex ist, sollte das Diagramm die Bedingung erklären, nicht nur den Pfeil.
Ohne diese Werkzeuge ist das Diagramm lediglich ein Bild. Es ist keine Spezifikation. Ingenieure werden wieder auf die direkte Code-Schreibung zurückgreifen, ohne auf das visuelle Modell Bezug zu nehmen, wodurch das Diagramm obsolet wird.
6️⃣ Datenfluss vs. Steuerfluss 📊
Ein häufiger Fehler ist die Verwechslung von Steuerfluss und Datenfluss. Zustandsmaschinen steuern den Modus des Roboters, aber sie verwalten nicht den Daten. Das Wahrnehmungssystem, der Planungsalgorithmus und das Aktuierungssystem des Roboters erzeugen alle Datenströme. Die Zustandsmaschine muss diese Ströme koordinieren, ohne selbst eine Engstelle zu werden.
Wenn Ihre Zustandsmaschine versucht, Sensordaten direkt zu verarbeiten, wird sie scheitern. Sie sollte Ereignisse auslösen, die andere Prozesse dazu veranlassen, die Daten zu verarbeiten. Zum Beispiel:
- Zustandsmaschine: Übergänge von „Bewegung“ zu „Scannen“.
- Wahrnehmungs-Thread: Empfängt das „Scannen“-Ereignis und erhöht die Kamerabildfrequenz.
- Planungs-Thread: Empfängt das „Scannen“-Ereignis und pausiert die Aktualisierung der Trajektorie.
Die Entkopplung der Steuerlogik von der Datenverarbeitungslogik ist entscheidend. Das Zustandsmaschinen-Diagramm sollte diese Übergaben eindeutig als Ereignisse, nicht als Schritte der Datenverarbeitung, darstellen.
7️⃣ Komplexität durch Modularität verwalten 🧩
Je leistungsfähiger der Roboter wird, desto größer wird die Zustandsmaschine. Ein einfacher Pick-and-Place-Roboter könnte fünf Zustände haben. Ein mobiler Manipulator könnte fünfzig haben. Eine Zustandsmaschine mit fünfzig Zuständen ist unmöglich zu pflegen, wenn jeder Zustand mit jedem anderen Zustand interagiert.
Übernehmen Sie einen modularen Ansatz. Teilen Sie das System in Teilsysteme auf:
- Bewegungs-Zustandsmaschine: Verwaltet Räder, Beine oder Ketten.
- Manipulations-Zustandsmaschine: Verwaltet Arme, Greifer oder Werkzeuge.
- Kommunikations-Zustandsmaschine: Verwaltet Netzwerk-Handshakes und Datenverbindungen.
Diese Teilsysteme kommunizieren über Ereignisse. Dadurch verringert sich die kognitive Belastung für den Ingenieur. Sie können die Bewegungs-Zustandsmaschine unabhängig von der Manipulations-Zustandsmaschine überprüfen. Diese Modularität ist die einzige Möglichkeit, Zustandsmaschinen-Architekturen für komplexe Robotik zu skalieren.
8️⃣ Dokumentation und Wartung 📝
Ein Zustandsmaschinen-Diagramm ist ein lebendiges Dokument. Der Code ändert sich, die Anforderungen ändern sich und die Hardware ändert sich. Wenn das Diagramm nicht gemeinsam mit dem Code aktualisiert wird, wird es zu einer falschen Information. Dies führt zum „Spaghetti-Diagramm“-Problem, bei dem das visuelle Modell keinerlei Ähnlichkeit mit der ausführbaren Logik aufweist.
Best Practices für die Wartung umfassen:
- Versionskontrolle:Behandeln Sie die Diagramm-Datei wie Code. Führen Sie Änderungen mit derselben Sorgfalt durch.
- Code-Generierung: Wo immer möglich, generieren Sie Code aus dem Diagramm oder verwenden Sie ein Framework, das sie synchron hält.
- Änderungsprotokolle: Wenn ein Übergang hinzugefügt oder entfernt wird, dokumentieren Sie den Grund. War es ein Sicherheits-Update? Eine Leistungsverbesserung?
Die Dokumentation sollte nicht nur die Zustände beschreiben. Sie sollte beschreiben, warumwarum. Warum ist dieser Übergang geschützt? Warum hat dieser Zustand Vorrang vor jenem? Diese Entscheidungen sind entscheidend für zukünftige Ingenieure, die den ursprünglichen Code nicht geschrieben haben.
9️⃣ Der menschliche Faktor im Design 👥
Berücksichtigen Sie abschließend den menschlichen Bediener. Der Zustandsautomat bestimmt, wie sich der Roboter verhält, was wiederum bestimmt, wie Menschen mit ihm interagieren. Wenn der Roboter zehn Minuten lang in den Zustand „Beschäftigt“ wechselt, könnte der Bediener denken, dass er defekt ist, und versuchen, einzugreifen. Wenn der Roboter in den Zustand „Pause“ wechselt, ohne eine klare Statusanzeige, könnte der Bediener annehmen, dass er stecken geblieben ist.
Der Zustandsautomat muss den Erwartungen des Menschen entsprechen. Übergänge sollten sichtbar, hörbar oder auf eine Weise signalisiert werden, die dem menschlichen Bediener verständlich ist. Dies wird oft in technischen Diagrammen übersehen, die sich ausschließlich auf logische Korrektheit konzentrieren und nicht auf die Benutzererfahrung. Ein Roboter, der logisch korrekt ist, aber schwer zu bedienen ist, ist ein gescheiterter Produkt.
🔟 Zukunftssicherung Ihrer Architektur 🚀
Die Robotiktechnologie entwickelt sich schnell. Neue Sensoren, neue Aktuatoren und neue KI-Modelle werden ständig eingeführt. Ihre Architektur des Zustandsautomaten muss flexibel genug sein, um diese Änderungen ohne eine vollständige Neuschreibung zu integrieren.
Vermeiden Sie das Festcodieren von Zustandsnamen. Verwenden Sie Aufzählungen oder Konstanten. Vermeiden Sie das Festcodieren von Übergangsbedingungen. Verwenden Sie bei Möglichkeit Konfigurationsdateien oder Parameter. Dadurch können Sie das Verhalten anpassen, ohne die gesamte Logikbasis neu zu kompilieren. Es ermöglicht auch, verschiedene Zustandskonfigurationen in der Simulation zu testen, bevor sie auf die Hardware deployt werden.
Indem Sie sich auf diese architektonischen Prinzipien konzentrieren, gehen Sie über die Grenzen des Standard-UML-Diagramms hinaus. Sie schaffen ein System, das widerstandsfähig, wartbar und robust genug für die physische Welt ist.
