











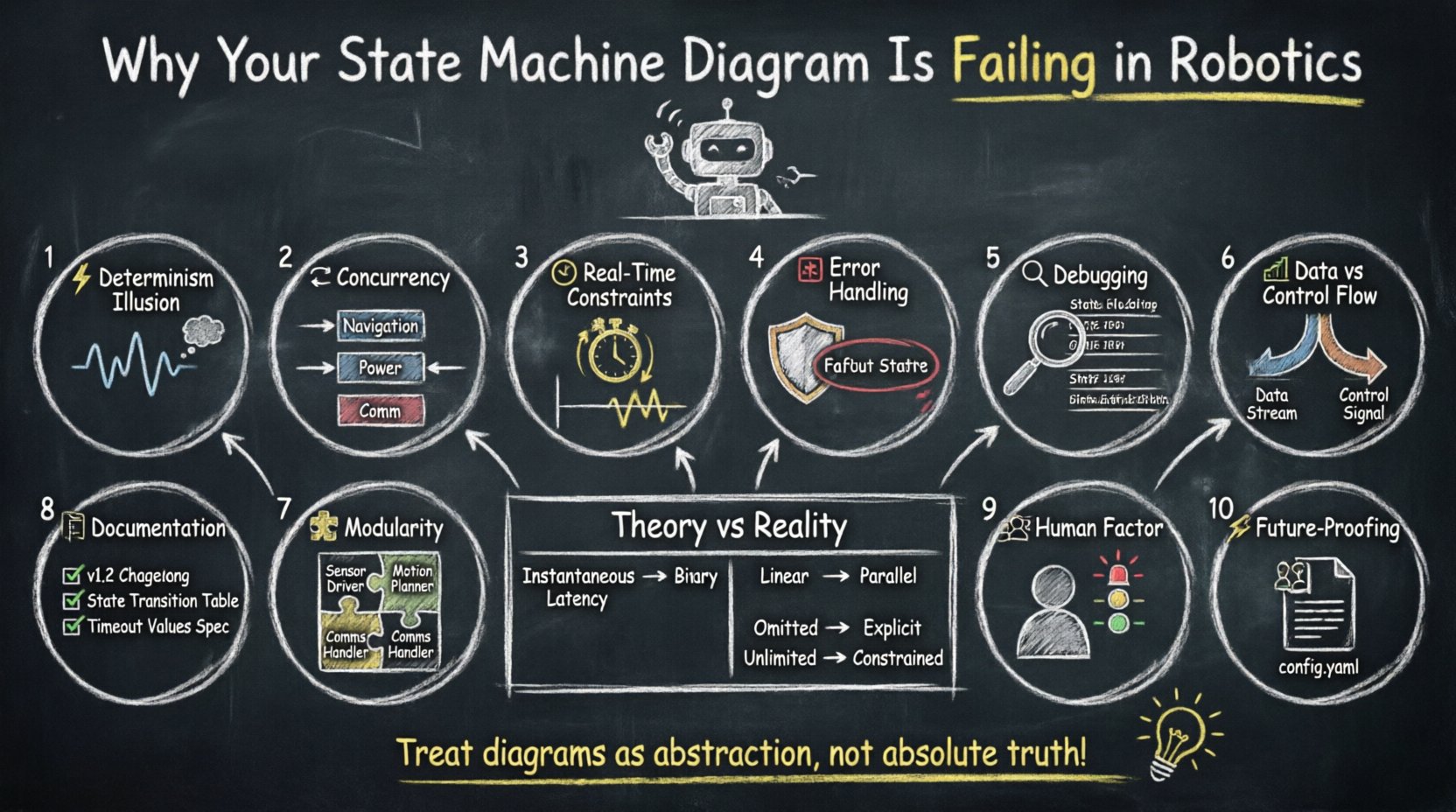
Inżynierowie robotyki często zaczynają architekturę systemów autonomicznych z poczuciem pewności. Maszyna stanów skończonych (FSM) lub diagram maszyny stanów UML wydają się idealnym projektem dla logiki sterowania. Jest on czysty, wizualny i deterministyczny na papierze. Jednak gdy te diagramy są przekładane na rzeczywisty kod działający na sprzęcie fizycznym, wyniki są często rozczarowujące. Systemy zawieszają się, pojawiają się nieoczekiwane przejścia i debugowanie staje się koszmarem. Rozłączenie nie wynika z samej filozofii projektowania, ale z założeń dotyczących środowiska i platformy wykonawczej. Ten przewodnik bada konkretne powody techniczne, dlaczego standardowe diagramy maszyn stanów mają trudności w rzeczywistych zastosowaniach robotyki i jak dostosować podejście do zapewnienia niezawodnego wdrożenia.
1️⃣ Iluzja determinizmu w systemach fizycznych
W teorii informatyki maszyna stanów działa w próżni. Przejścia są natychmiastowe, a wejścia są idealnie zsynchronizowane. W robotyce jednak świat fizyczny wprowadza opóźnienia, szumy i zmienność. Diagram maszyny stanów zwykle zakłada, że jeśli robot jest w stanieStan A i Zdarzenie X występuje, przechodzi do Stanu B. Ta logika jest prawdziwa w symulacji, ale sprzęt wprowadza zmienne, które diagramy rzadko odzwierciedlają.
- Opóźnienie sygnału: Czujniki nie zgłaszają danych natychmiast. Czujnik odległości może zgłosić przeszkodę 20 milisekund po tym, jak robot do niej uderzy. Maszyna stanów widzi zdarzenie późno, co może spowodować kolizję przed wykonaniem logiki przejścia.
- Kolejność zdarzeń: W środowisku wielowątkowym dwa zdarzenia mogą zostać wyzwolone jednocześnie. Diagram maszyny stanów zwykle pokazuje je sekwencyjnie, ale procesor może je obsłużyć w innej kolejności, co prowadzi do niepożądanych stanów.
- Zuywanie sprzętu: Silnik może pobierać więcej prądu niż przewidziano, co nieoczekiwanie wyzwala stan zarządzania energią. Diagram zakłada standardowe warunki pracy.
Aby temu zaradzić, należy traktować maszynę stanów nie jako absolutną prawdę, lecz jako abstrakcję najwyższego poziomu. Warstwa implementacji musi zawierać buforowanie, tłumienie drgań i sprawdzanie czasu, które wizualny diagram nie pokazuje wyraźnie.
2️⃣ Współbieżność i stany równoległe 🔄
Jednym z najistotniejszych ograniczeń podstawowych diagramów maszyn stanów jest ich liniowa natura. Aplikacje robotyki są z natury współbieżne. Robot musi poruszać się, jednocześnie słuchając poleceń awaryjnego zatrzymania, monitorując poziom baterii i komunikując się z stacją bazową. Tradycyjne sekwencyjne maszyny stanów zmuszają do tworzenia skomplikowanych zagnieżdżonych stanów lub eksplozji kombinatorycznej stanów, aby przedstawić zachowania równoległe.
Problem hierarchiczny
Gdy próbujesz modelować aktywności równoległe za pomocą standardowej hierarchii UML, diagram staje się nieczytelny. Otrzymujesz „chartę spaghetti”, w której każda kombinacja stanu nawigacji i poziomu baterii wymaga unikalnego stanu. To podejście jest kruche. Jeśli dodasz nowy czujnik lub nowy protokół bezpieczeństwa, musisz przepisać dziesiątki stanów.
Rozwiązanie: Obszary ortogonalne
Zaawansowane implementacje maszyn stanów wspierają obszary ortogonalne. Pozwala to systemowi uruchamiać wiele niezależnych maszyn stanów równolegle. Na przykład:
- Obszar 1:Nawigacja (Poruszanie się, Zatrzymanie, Unikanie przeszkód)
- Obszar 2:Zarządzanie energią (Ładowanie, Niski poziom baterii, Normalny)
- Obszar 3:Komunikacja (Połączony, Rozłączony, Synchronizacja)
Bez tej możliwości Twój diagram zawodzi, ponieważ nie może odzwierciedlać prawdziwej architektury systemu. Model wizualny musi odpowiadać modelowi logicznemu wykonania. Jeśli implementacja używa pojedynczego wątku sterowania, diagram jest kłamstwem.
3️⃣ Czasowanie i ograniczenia czasowe ⏱️
Maszyny stanów UML nie kodują domyślnie ograniczeń czasowych. Opisującozachodzi, a niekiedyzachodzi. W robotyce czasowanie jest często ważniejsze niż logika. Maszyna stanów nawigacji może przejść do stanu „Awaryjna zatrzymanie”, jeśli wykryto przeszkodę. Jeśli logika wykrywania zajmuje 100 milisekund, robot już znacznie się przesunął.
Zastanów się nad poniższymi scenariuszami, w których czasowanie narusza diagram:
- Przekroczenia czasu oczekiwania: Maszyna stanów może nieograniczenie czekać na sygnał. W świecie rzeczywistym nieograniczone czekanie to błąd systemu. Zegary muszą być jasno określone.
- Częstotliwość skanowania: Czujniki skanują w określonych odstępach czasu. Przejście stanu może zostać wyzwolone pomiędzy cyklami skanowania, co prowadzi do całkowitego przegapienia zdarzenia.
- Zakłócenia: Planowanie systemu operacyjnego może powodować opóźnienia. Maszyna stanów zaprojektowana na precyzję 1 ms zawiedzie, jeśli system operacyjny wprowadzi zakłócenia o wartości 50 ms.
Skuteczne diagramy dla robotyki muszą oznaczać stany wymaganiami czasowymi. Jeśli stan wymaga okna odpowiedzi 50 ms, diagram powinien odzwierciedlać to ograniczenie, nawet jeśli implementacja oprogramowania zajmuje się tym osobno.
4️⃣ Obsługa błędów i odporność na awarie 🛑
Większość diagramów maszyn stanów skupia się na drodze bez przeszkód. Pokazują, jak robot przechodzi od Start do Celu. Zazwyczaj nie pokazują, co się dzieje, gdy silnik ramienia się przepali, Wi-Fi się wyłączy lub napięcie baterii spadnie poniżej bezpiecznego poziomu. W oprogramowaniu błędy to wyjątki. W robotyce błędy to domyślny stan wszechświata.
Brakujące stany błędów
Jeśli Twój diagram nie modeluje jawnie trybów awarii, Twój system jest niestabilny. Potrzebujesz stanów dla:
- Awaria czujnika: Co jeśli lidar przestanie zwracać dane?
- Zablokowanie aktuatora: Co jeśli koło jest fizycznie zablokowane?
- Przekroczenie czasu logicznego: Co jeśli robot zostanie w pętli?
Sieć bezpieczeństwa
Systemy odpornościowe implementują globalny stan błędu, do którego można przejść z dowolnego stanu. Nazywa się go często „zegarem nadzorującym” lub „trybem bezpiecznym”. Jeśli którykolwiek fragment logiki zawiesi się lub wygeneruje nieprawidłowe dane, system musi wymusić przejście do tego stanu bezpieczeństwa. Standardowy diagram często ukrywa to za szczegółami implementacji, co czyni je niewidocznymi dla stakeholderów i przyszłych utrzymujących.
| Funkcja | Diagram teoretyczny | Implementacja w świecie rzeczywistym |
|---|---|---|
| Przejścia | Natychmiastowy | Podlega opóźnieniom i niestabilnościom |
| Wejścia | Binarny (Prawda/Fałsz) | Zaszumione, analogowe lub brakujące dane |
| Zrównoleglenie | Liniowy lub zagnieżdżony | Równoległe wątki i procesy |
| Błędy | Często pomijane | Muszą być jasne i priorytetowe |
| Pamięć | Nieograniczona | Ograniczona przez sprzęt wbudowany |
5️⃣ Wyzwania związane z debugowaniem i wizualizacją 🔍
Gdy maszyna stanów zawodzi w środowisku produkcyjnym, debugowanie jest trudne. Standardowe schematy to dokumenty statyczne. Nie pokazują historii stanów. Nie pokazują czasu wystąpienia zdarzeń. Nie pokazują wartości danych, które wywołały przejście.
Aby maszyny stanów były debugowalne w robotyce, potrzebujesz:
- Rejestrowanie stanów: Każde przejście powinno być rejestrowane z znacznikiem czasu i wartościami odpowiednich zmiennych.
- Stany historii: Schemat powinien wspierać przejścia „Historii”. Jeśli robot był w stanie A, przeszedł do stanu B, a następnie stan B zawiodł, powinien wiedzieć, by wrócić do stanu A, a nie do stanu domyślnego.
- Śledzenie: Kod musi być śledzony z powrotem do schematu. Jeśli logika przejścia jest skomplikowana, schemat powinien wyjaśnić warunek, a nie tylko strzałkę.
Bez tych narzędzi schemat jest tylko obrazkiem. Nie jest specyfikacją. Inżynierowie wrócą do pisania logiki bezpośrednio w kodzie, nie odwołując się do modelu wizualnego, co sprawia, że schemat staje się przestarzały.
6️⃣ Przepływ danych vs. Przepływ sterowania 📊
Powszechnym błędem jest mylenie przepływu sterowania z przepływem danych. Maszyny stanów kontrolują tryb robota, ale nie zarządzają danymi. System percepcji robota, algorytm planowania i system napędowy generują strumienie danych. Maszyna stanów musi koordynować te strumienie, nie stając się węzłem kluczowym.
Jeśli masz stanowy mechanizm próbujący przetwarzać dane czujników bezpośrednio, to się nie powiedzie. Powinien wywoływać zdarzenia, które powodują, że inne procesy zajmują się przetwarzaniem danych. Na przykład:
- Maszyna stanów: Przejścia z „Poruszania się” do „Skanowania”.
- Wątek percepcji: Otrzymuje zdarzenie „Skanowanie” i zwiększa częstotliwość klatek kamery.
- Wątek planowania: Otrzymuje zdarzenie „Skanowanie” i wstrzymuje aktualizacje trajektorii.
Odseparowanie logiki sterowania od logiki przetwarzania danych jest kluczowe. Diagram maszyny stanów powinien jasno pokazywać te przekazywania jako zdarzenia, a nie jako kroki przetwarzania danych.
7️⃣ Zarządzanie złożonością za pomocą modułowości 🧩
W miarę jak robot staje się bardziej zdolny, maszyna stanów rośnie. Prosty robot do podnoszenia i umieszczania może mieć pięć stanów. Mobilny manipulator może mieć pięćdziesiąt. Maszyna pięćdziesięciostanowa jest niemożliwa do utrzymania, jeśli każdy stan współdziała z każdym innym.
Przyjmij podejście modułowe. Podziel system na podsystemy:
- Maszyna stanów lokomocji: Obsługuje koła, nogi lub ślimaki.
- Maszyna stanów manipulacji: Obsługuje ramiona, chwytaki lub narzędzia.
- Maszyna stanów komunikacji: Obsługuje ujęcia sieciowe i połączenia danych.
Te podsystemy komunikują się za pomocą zdarzeń. Zmniejsza to obciążenie poznawcze inżyniera. Możesz niezależnie zweryfikować maszynę stanów lokomocji od maszyny stanów manipulacji. Ta modułowość to jedyny sposób na skalowanie architektur maszyn stanów w złożonej robotyce.
8️⃣ Dokumentacja i utrzymanie 📝
Diagram maszyny stanów to dokument żywy. Kod się zmienia, wymagania się zmieniają, a także sprzęt. Jeśli diagram nie jest aktualizowany równolegle z kodem, staje się nieprawdziwym źródłem informacji. To prowadzi do problemu „diagramu makaronowego”, gdzie model wizualny nie ma nic wspólnego z wykonywalną logiką.
Najlepsze praktyki utrzymania obejmują:
- Kontrola wersji: Traktuj plik diagramu jak kod. Wprowadzaj zmiany z taką samą starannością.
- Generowanie kodu: Tam, gdzie to możliwe, generuj kod z diagramu lub używaj frameworku, który utrzymuje je zsynchronizowane.
- Dzienniki zmian: Gdy dodawane lub usuwane jest przejście, zapisz powód. Czy to naprawa bezpieczeństwa? Optymalizacja wydajności?
Dokumentacja nie powinna tylko opisywać stanów. Powinna opisywać dlaczego. Dlaczego to przejście jest chronione? Dlaczego ten stan ma priorytet przed tym? Te decyzje są kluczowe dla przyszłych inżynierów, którzy nie pisali oryginalnego kodu.
9️⃣ Czynnik ludzki w projektowaniu 👥
Na końcu rozważ operatora człowieka. Maszyna stanów określa, jak zachowuje się robot, co z kolei określa sposób interakcji ludzi z nim. Jeśli robot wejdzie w stan „Zajęty” przez 10 minut, operator może uznać, że jest uszkodzony i spróbuje się wtrącić. Jeśli robot wejdzie w stan „Wstrzymany” bez jasnego światła statusu, operator może uznać, że się zablokował.
Maszyna stanów musi odpowiadać oczekiwaniom ludzi. Przejścia powinny być widoczne, słyszalne lub sygnalizowane w sposób zrozumiały dla operatora. Często to pomijane w diagramach technicznych, które skupiają się wyłącznie na poprawności logicznej, a nie doświadczeniu użytkownika. Robot, który jest logicznie poprawny, ale trudny w obsłudze, to nieudany produkt.
🔟 Przyszłościowe zabezpieczenie architektury 🚀
Technologia robotyki szybko się rozwija. Nowe czujniki, nowe aktuatory i nowe modele AI są wprowadzane ciągle. Architektura maszyny stanów musi być wystarczająco elastyczna, aby dopasować się do tych zmian bez konieczności całkowitej przepisania.
Unikaj tworzenia stałych nazw stanów. Używaj wyliczeń lub stałych. Unikaj tworzenia stałych warunków przejść. Gdy to możliwe, używaj plików konfiguracyjnych lub parametrów. Pozwala to dostosować zachowanie bez ponownego kompilowania całego rdzenia logiki. Pozwala również przetestować różne konfiguracje stanów w symulacji przed wdrożeniem na sprzęcie.
Skupiając się na tych zasadach architektonicznych, przechodzisz poza ograniczenia standardowego diagramu UML. Tworzysz system odporny, łatwy w utrzymaniu i wystarczająco wytrzymały na rzeczywisty świat fizyczny.
