











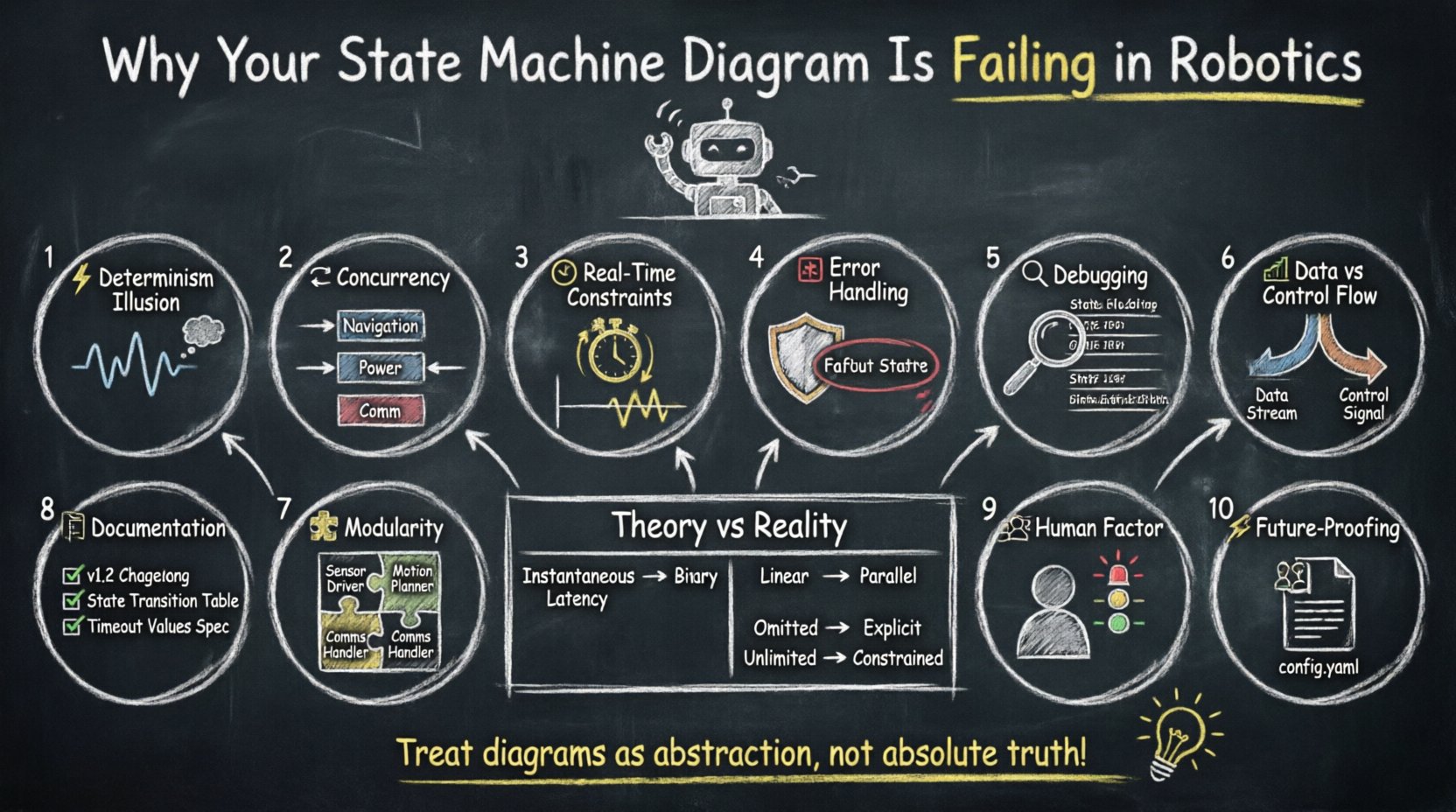
Los ingenieros de robótica a menudo comienzan la arquitectura de sistemas autónomos con una sensación de confianza. Una Máquina de Estados Finitos (FSM) o un diagrama de máquina de estados UML parece ser el plano perfecto para la lógica de control. Es limpio, visual y determinista en papel. Sin embargo, cuando estos diagramas se traducen en código real que se ejecuta en hardware físico, los resultados a menudo son decepcionantes. Los sistemas se bloquean, ocurren transiciones inesperadas y depurar se convierte en una pesadilla. La desconexión no reside en la filosofía de diseño en sí, sino en las suposiciones realizadas sobre el entorno y la plataforma de ejecución. Esta guía explora las razones técnicas específicas por las cuales los diagramas estándar de máquinas de estados tienen dificultades en robótica del mundo real y cómo ajustar tu enfoque para una implementación robusta.
1️⃣ La ilusión de determinismo en sistemas físicos
En la ciencia de la computación teórica, una máquina de estados opera en el vacío. Las transiciones son instantáneas y las entradas están perfectamente sincronizadas. Sin embargo, en robótica, el mundo físico introduce latencia, ruido y variabilidad. Un diagrama de máquina de estados asume típicamente que si el robot está en Estado A y Evento X ocurre, pasa al Estado B. Esta lógica es válida en simulación, pero el hardware introduce variables que los diagramas rara vez capturan.
- Latencia de señal:Los sensores no reportan datos instantáneamente. Un sensor de distancia podría reportar un obstáculo 20 milisegundos después de que el robot lo golpee. La máquina de estados percibe el evento tarde, lo que podría provocar una colisión antes de que se ejecute la lógica de transición.
- Orden de eventos:En un entorno multi-hilo, dos eventos podrían activarse simultáneamente. El diagrama de máquina de estados generalmente los muestra de forma secuencial, pero el procesador podría manejarlos en un orden diferente, lo que lleva a estados no deseados.
- Degradación del hardware:Un motor podría consumir más corriente de la esperada, desencadenando inesperadamente un estado de gestión de energía. El diagrama asume condiciones de operación nominales.
Para mitigar esto, debes tratar la máquina de estados no como la verdad absoluta, sino como una abstracción de alto nivel. La capa de implementación debe incluir almacenamiento en búfer, amortiguación y comprobaciones de tiempo que el diagrama visual no muestra explícitamente.
2️⃣ Concurrencia y estados paralelos 🔄
Una de las limitaciones más significativas de los diagramas básicos de máquinas de estados es su naturaleza lineal. Las aplicaciones de robótica son inherentemente concurrentes. Un robot debe navegar mientras escucha comandos de parada de emergencia, monitorea el nivel de batería y se comunique con una estación base al mismo tiempo. Las máquinas de estados secuenciales tradicionales te obligan a crear estados anidados complejos o una explosión combinatoria de estados para representar comportamientos paralelos.
El problema jerárquico
Cuando intentas modelar actividades paralelas usando la jerarquía estándar de UML, el diagrama se vuelve ilegible. Terminas con un ‘diagrama de espagueti’ donde cada combinación de estado de navegación y nivel de batería requiere un estado único. Este enfoque es frágil. Si añades un nuevo sensor o un nuevo protocolo de seguridad, debes reescribir decenas de estados.
La solución: regiones ortogonales
Las implementaciones avanzadas de máquinas de estados admiten regiones ortogonales. Esto permite que el sistema ejecute múltiples máquinas de estados independientes en paralelo. Por ejemplo:
- Región 1:Navegación (Moviendo, Detenido, Evitación de obstáculos)
- Región 2:Gestión de energía (Cargando, Batería baja, Normal)
- Región 3:Comunicación (Conectado, Desconectado, Sincronizando)
Sin esta capacidad, tu diagrama está fallando porque no puede representar la arquitectura real del sistema. El modelo visual debe coincidir con el modelo de ejecución lógica. Si la implementación utiliza un único hilo de control, el diagrama es una mentira.
3️⃣ Temporización y restricciones en tiempo real ⏱️
Las máquinas de estados UML no codifican de forma nativa restricciones de temporización. Describenquéocurre, nocuándoocurre. En robótica, la temporización suele ser más crítica que la lógica. Una máquina de estados de navegación podría pasar al estado «Parada de emergencia» si se detecta un obstáculo. Si la lógica de detección tarda 100 milisegundos, el robot ya se ha movido significativamente.
Considere los siguientes escenarios en los que la temporización rompe el diagrama:
- Tiempo de espera (timeout): Una máquina de estados podría esperar indefinidamente una señal. En el mundo real, esperar indefinidamente es un fallo del sistema. Los temporizadores deben ser explícitos.
- Tasas de escaneo: Los sensores escanean a intervalos específicos. Una transición de estado podría activarse entre ciclos de escaneo, haciendo que la lógica pierda el evento por completo.
- Jitter: La programación del sistema operativo puede causar retrasos. Una máquina de estados diseñada para una precisión de 1 ms fallará si el sistema operativo subyacente introduce un jitter de 50 ms.
Los diagramas eficaces para robótica deben anotar los estados con requisitos de temporización. Si un estado requiere una ventana de respuesta de 50 ms, el diagrama debe reflejar esa restricción, incluso si la implementación de software la maneja por separado.
4️⃣ Manejo de errores y tolerancia a fallos 🛑
La mayoría de los diagramas de máquinas de estados se centran en el camino óptimo. Muestran cómo el robot pasa de Inicio a Meta. Rara vez muestran qué ocurre cuando el motor del brazo se quema, se pierde la conexión Wi-Fi o el voltaje de la batería baja por debajo de los niveles seguros. En software, los errores son excepciones. En robótica, los errores son el estado por defecto del universo.
Estados de error omitidos
Si su diagrama no modela explícitamente los modos de fallo, su sistema es frágil. Necesita estados para:
- Fallo del sensor: ¿Qué pasaría si el lidar deja de devolver datos?
- Bloqueo del actuador: ¿Qué pasaría si una rueda está físicamente atascada?
- Tiempo de espera de la lógica: ¿Qué pasaría si el robot se queda atrapado en un bucle?
La red de seguridad
Los sistemas robustos implementan un estado global de error que puede activarse desde cualquier estado. A menudo se denomina estado de «vigilancia» (Watchdog) o «modo seguro». Si alguna rama de lógica se queda colgada o produce datos inválidos, el sistema debe forzar una transición a este estado seguro. Un diagrama estándar suele ocultar esto detrás de detalles de implementación, haciéndolo invisible para los interesados y los futuros mantenedores.
| Característica | Diagrama teórico | Implementación en el mundo real |
|---|---|---|
| Transiciones | Instantáneo | Sujeto a latencia y jitter |
| Entradas | Binario (Verdadero/Falso) | Datos ruidosos, analógicos o faltantes |
| Concurrencia | Lineal o anidado | Hilos y procesos paralelos |
| Errores | A menudo omitido | Debe ser explícito y priorizado |
| Memoria | Ilimitado | Limitado por el hardware embebido |
5️⃣ Desafíos de depuración y visualización 🔍
Cuando una máquina de estados falla en producción, la depuración es difícil. Los diagramas estándar son documentos estáticos. No muestran el historial de estados. No muestran el momento de los eventos. No muestran los valores de datos que desencadenaron una transición.
Para hacer que las máquinas de estados sean depurables en robótica, necesitas:
- Registro de estados:Cada transición debe registrarse con una marca de tiempo y los valores de las variables relevantes.
- Estados de historial:El diagrama debe admitir transiciones de “historial”. Si el robot estaba en el Estado A, pasó al Estado B y luego el Estado B falló, debe saber volver al Estado A, no a un estado predeterminado.
- Rastreabilidad:El código debe poder rastrearse de vuelta al diagrama. Si la lógica de una transición es compleja, el diagrama debe explicar la condición, no solo la flecha.
Sin estas herramientas, el diagrama es meramente una imagen. No es una especificación. Los ingenieros volverán a escribir la lógica directamente en el código sin referirse al modelo visual, haciendo que el diagrama quede obsoleto.
6️⃣ Flujo de datos frente a flujo de control 📊
Un error común es confundir el flujo de control con el flujo de datos. Las máquinas de estados controlan el modo del robot, pero no gestionan el datos. El sistema de percepción del robot, el algoritmo de planificación y el sistema de actuación generan todos flujos de datos. La máquina de estados debe coordinar estos flujos sin convertirse en un cuello de botella.
Si su máquina de estados intenta procesar datos de sensores directamente, fallará. Debería desencadenar eventos que causen que otros procesos manejen los datos. Por ejemplo:
- Máquina de estados: Transiciones de «Moviéndose» a «Escaneando».
- Hilo de percepción: Recibe el evento «Escaneando» y aumenta la tasa de fotogramas de la cámara.
- Hilo de planificación: Recibe el evento «Escaneando» y pausa las actualizaciones de trayectoria.
Desacoplar la lógica de control de la lógica de procesamiento de datos es esencial. El diagrama de la máquina de estados debe mostrar claramente estas transferencias como eventos, no como pasos de procesamiento de datos.
7️⃣ Gestión de la complejidad con modularidad 🧩
A medida que el robot se vuelve más capaz, la máquina de estados crece. Un robot de recogida y colocación simple podría tener cinco estados. Un manipulador móvil podría tener cincuenta. Una máquina de cincuenta estados es imposible de mantener si cada estado interactúa con todos los demás estados.
Adopte un enfoque modular. Divida el sistema en subsistemas:
- Máquina de estados de locomoción: Maneja ruedas, patas o orugas.
- Máquina de estados de manipulación: Maneja brazos, pinzas o herramientas.
- Máquina de estados de comunicación: Maneja los intercambios de red y los enlaces de datos.
Estos subsistemas se comunican mediante eventos. Esto reduce la carga cognitiva sobre el ingeniero. Puede verificar la máquina de estados de locomoción de forma independiente de la máquina de estados de manipulación. Esta modularidad es la única forma de escalar las arquitecturas de máquinas de estados para robótica compleja.
8️⃣ Documentación y mantenimiento 📝
Un diagrama de máquina de estados es un documento vivo. Cambian el código, los requisitos y el hardware. Si el diagrama no se actualiza junto con el código, se convierte en información errónea. Esto conduce al problema del «diagrama espagueti», donde el modelo visual no guarda ninguna similitud con la lógica ejecutable.
Las mejores prácticas para el mantenimiento incluyen:
- Control de versiones: Trate el archivo del diagrama como código. Realice confirmaciones de cambios con la misma rigurosidad.
- Generación de código: Donde sea posible, genere código a partir del diagrama o utilice un marco que los mantenga sincronizados.
- Registros de cambios: Cuando se añade o elimina una transición, documente la razón. ¿Fue una corrección de seguridad? ¿Una optimización de rendimiento?
La documentación no debe describir solo los estados. Debe describir el por qué. ¿Por qué está protegida esta transición? ¿Por qué este estado tiene prioridad sobre aquel? Estas decisiones son críticas para los ingenieros futuros que no escribieron el código original.
9️⃣ El factor humano en el diseño 👥
Por último, considere al operador humano. La máquina de estados dicta cómo se comporta el robot, lo que a su vez determina cómo los humanos interactúan con él. Si el robot entra en un estado «Ocupado» durante 10 minutos, el operador podría pensar que está roto y tratar de intervenir. Si el robot entra en «Pausado» sin una luz de estado clara, el operador podría suponer que está atascado.
La máquina de estados debe alinearse con las expectativas humanas. Las transiciones deben ser visibles, audibles o señaladas de una manera que el operador humano entienda. Esto a menudo se pasa por alto en los diagramas técnicos, que se enfocan únicamente en la corrección lógica en lugar de la experiencia del usuario. Un robot que es lógicamente correcto pero confuso de operar es un producto fallido.
🔟 Futuro-proofing de tu arquitectura 🚀
La tecnología de robótica evoluciona rápidamente. Se introducen constantemente nuevos sensores, nuevos actuadores y nuevos modelos de IA. Su arquitectura de máquina de estados debe ser lo suficientemente flexible para adaptarse a estos cambios sin una reescritura completa.
Evite codificar nombres de estados directamente. Use enumeraciones o constantes. Evite codificar condiciones de transición directamente. Use archivos de configuración o parámetros cuando sea posible. Esto le permite ajustar el comportamiento sin recompilar todo el núcleo lógico. También le permite probar diferentes configuraciones de estados en simulación antes de desplegar en hardware.
Al centrarse en estos principios arquitectónicos, usted va más allá de las limitaciones del diagrama UML estándar. Crea un sistema que sea resistente, mantenible y lo suficientemente robusto para el mundo físico.
