











ロボティクスエンジニアは、自律システムのアーキテクチャを始める際、しばしば自信を持ちます。有限状態機械(FSM)やUML状態機械図は、制御論理の完璧な設計図のように思えます。紙上では明快で視覚的であり、決定論的です。しかし、これらの図が実際のハードウェア上で実行されるコードに変換されると、結果はしばしば失望を伴います。システムが停止し、予期しない遷移が発生し、デバッグは地獄のようになります。このギャップの原因は、設計哲学そのものにあるのではなく、環境や実行プラットフォームに関する前提にあります。このガイドでは、標準的な状態機械図が現実のロボティクスにおいて困難に直面する具体的な技術的要因を検証し、堅牢な展開を実現するためのアプローチの調整方法を説明します。
1️⃣ 物理システムにおける決定論の錯覚
理論的コンピュータサイエンスでは、状態機械は真空状態で動作します。遷移は瞬時に発生し、入力は完全に同期されています。しかしロボティクスでは、物理世界が遅延、ノイズ、ばらつきをもたらします。状態機械図は、ロボットが「状態A」にあり、イベントXが発生すると、状態B」に移行すると仮定しています。この論理はシミュレーションでは成り立ちますが、ハードウェアは図ではほとんど捉えられない変数を導入します。
- 信号遅延:センサーはデータを即座に報告しません。距離センサーは、ロボットが障害物に衝突してから20ミリ秒後に障害物を検出するかもしれません。状態機械はそのイベントを遅れて認識するため、遷移ロジックが実行される前に衝突が発生する可能性があります。
- イベントの順序:マルチスレッド環境では、2つのイベントが同時に発生する可能性があります。状態機械図は通常それらを順次に示しますが、プロセッサは異なる順序で処理する可能性があり、予期しない状態に至る原因になります。
- ハードウェアの劣化:モーターが予想よりも多くの電流を引き、予期せぬ電力管理状態を引き起こす可能性があります。図は通常の動作条件を前提としています。
これを緩和するためには、状態機械を絶対的な真実ではなく、高レベルの抽象化と捉える必要があります。実装層には、視覚的な図に明示的に示されていないバッファリング、ノイズ除去、タイミングチェックを含めるべきです。
2️⃣ 並行性と並列状態 🔄
基本的な状態機械図の最も顕著な制限の一つは、その線形性です。ロボティクスアプリケーションは本質的に並行性を有しています。ロボットは、緊急停止コマンドの受信、バッテリー残量の監視、ベースステーションとの通信を同時に実行しなければなりません。従来の順次状態機械では、並列動作を表現するために複雑なネストされた状態、あるいは状態の組み合わせ爆発を強いることになります。
階層構造の問題
標準的なUML階層構造を使って並列動作をモデル化しようとすると、図は読みにくくなります。ナビゲーション状態とバッテリー残量のすべての組み合わせに対して固有の状態が必要になる「スパゲッティチャート」に陥ります。このアプローチは脆いです。新しいセンサーを追加したり、新しい安全プロトコルを導入したりすると、数十の状態を再書き直さなければなりません。
解決策:直交領域
高度な状態機械実装では、直交領域をサポートしています。これにより、複数の独立した状態機械を並列で実行できるようになります。例えば:
- 領域1:ナビゲーション(移動中、停止中、障害物回避)
- 領域2:電力管理(充電中、低電力、通常)
- 領域3:通信(接続中、切断中、同期中)
この機能がなければ、あなたの図は失敗しているのです。なぜなら、システムの真のアーキテクチャを表現できないからです。視覚モデルは論理実行モデルと一致しなければなりません。実装が単一の制御スレッドを使用しているのに、図がそれを反映していないならば、それは嘘です。
3️⃣ タイミングとリアルタイム制約 ⏱️
UMLステートマシンは、タイミング制約をネイティブに表現しません。それらは「何が」起こるかを記述するものであり、何が起こるかを、いつ起こるかを記述するものである。ロボティクスにおいては、タイミングは論理よりもしばしばより重要である。障害物が検出された場合、ナビゲーションステートマシンは「緊急停止」に遷移する可能性がある。検出ロジックに100ミリ秒かかれば、ロボットはすでに大きく移動しているだろう。
以下のシナリオでは、タイミングが図を破綻させる可能性がある。
- タイムアウト: ステートマシンは、信号を無期限に待つ可能性がある。現実世界では、無期限に待つことはシステム障害である。タイマーは明示的に設定しなければならない。
- スキャンレート: センサは特定の間隔でスキャンする。ステート遷移がスキャンサイクルの間に発生する可能性があり、その結果、ロジックがイベントを完全に見逃すことがある。
- ジッター: オペレーティングシステムのスケジューリングにより遅延が生じる。1msの精度を想定したステートマシンは、基盤となるOSが50msのジッターを引き起こすと失敗する。
ロボティクス向けの効果的な図は、ステートにタイミング要件を明記しなければならない。あるステートが50msの応答ウィンドウを必要とする場合、図はその制約を反映すべきであり、ソフトウェア実装が別途処理しているとしても同様である。
4️⃣ エラー処理とフェイルセーフ性 🛑
ほとんどのステートマシン図は、順調な経路に注目している。ロボットがスタートからゴールへ移動する様子を示す。しかし、アームモーターが焼けたとき、Wi-Fiが切断されたとき、バッテリー電圧が安全レベルを下回ったときの対応は、ほとんど示されない。ソフトウェアではエラーは例外であるが、ロボティクスではエラーこそが宇宙の常態である。
エラー状態の欠如
図に障害モードを明示的にモデル化していない場合、システムは脆弱である。以下の状態が必要となる。
- センサ障害: ライダーがデータを返さなくなった場合はどうなるか?
- アクチュエータのロック: ホイールが物理的に詰まった場合はどうなるか?
- ロジックタイムアウト: ロボットがループにハマった場合はどうなるか?
安全網
信頼性の高いシステムは、任意の状態から進入可能なグローバルエラー状態を実装する。これはしばしば「ウォッチドッグ」または「セーフモード」状態と呼ばれる。どのロジックブランチも停止したり、無効なデータを生成したりした場合、システムはこの安全状態への強制遷移を実行しなければならない。標準的な図では、この仕組みが実装詳細の陰に隠され、ステークホルダーおよび将来の保守担当者にとって見えにくくなる。
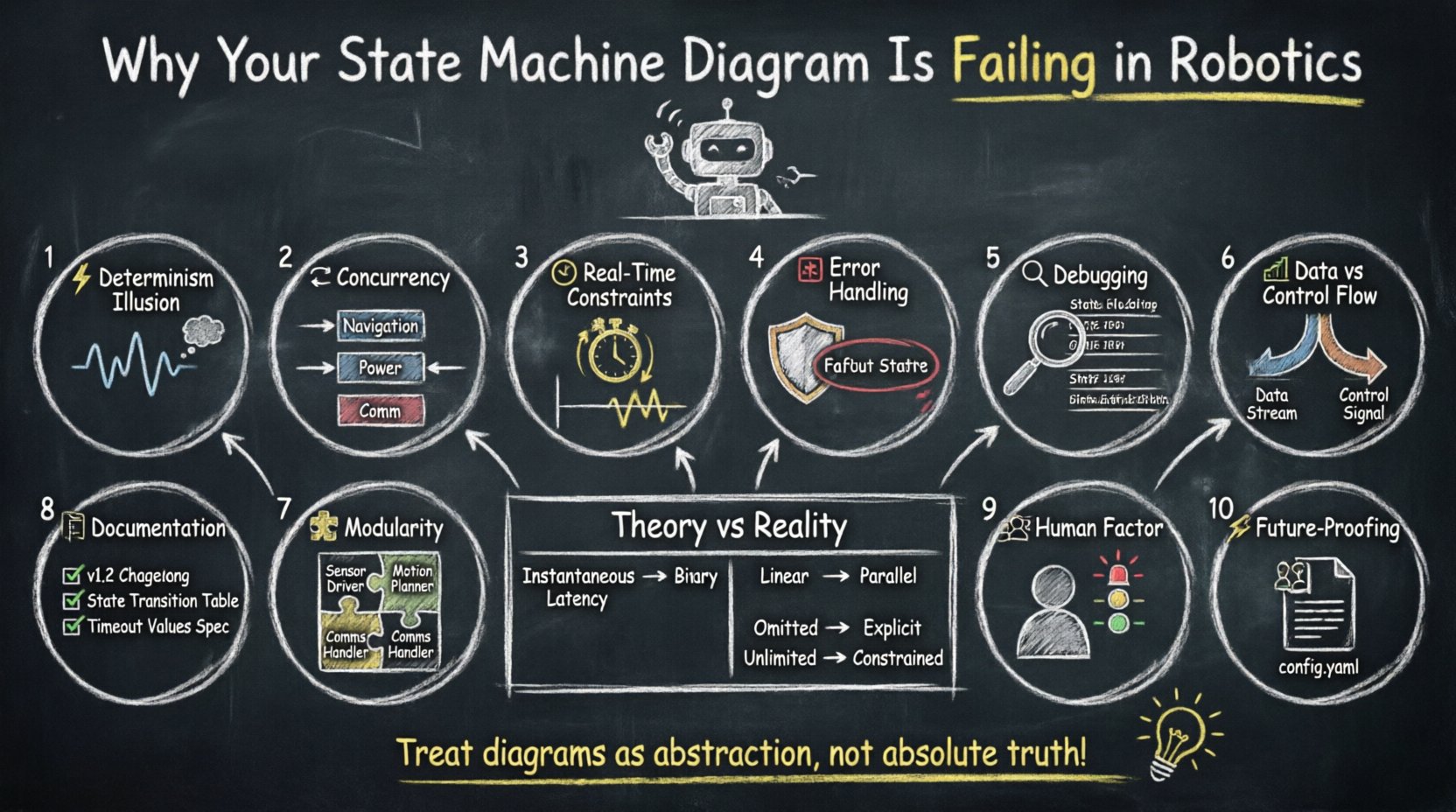
| 機能 | 理論的図 | 現実世界の実装 |
|---|---|---|
| 遷移 | 即時 | 遅延やジッターの影響を受ける |
| 入力 | 2値(真/偽) | ノイズが多い、アナログ、または欠落したデータ |
| 並行処理 | 線形またはネストされた | 並行スレッドおよびプロセス |
| エラー | しばしば省略される | 明示的で優先順位が明確でなければならない |
| メモリ | 無制限 | 組み込みハードウェアの制約 |
5️⃣ デバッグと可視化の課題 🔍
ステートマシンが本番環境で失敗した場合、デバッグは困難である。標準的な図は静的な文書である。状態の履歴を示さない。イベントのタイミングを示さない。遷移を引き起こしたデータ値を示さない。
ロボティクスにおけるステートマシンのデバッグ可能性を高めるには、以下のものが必要である:
- ステートログ記録: すべての遷移は、タイムスタンプと関連する変数の値とともにログに記録されるべきである。
- 履歴状態: 図は「履歴」遷移をサポートすべきである。ロボットが状態Aにあり、状態Bに移行し、その後状態Bがクラッシュした場合、デフォルト状態ではなく状態Aに戻るべきである。
- トレーサビリティ: コードは図に戻って追跡可能でなければならない。遷移ロジックが複雑な場合、図は矢印だけでなく、条件を説明すべきである。
これらのツールがなければ、図は単なる絵に過ぎない。仕様書ではない。エンジニアは視覚モデルを参照せずに、コードに直接ロジックを書くようになり、図は陳腐化してしまう。
6️⃣ データフロー vs. コントロールフロー 📊
よくある落とし穴は、コントロールフローとデータフローを混同することである。ステートマシンはロボットのモードを制御するが、データを管理するわけではない。ロボットのセンシングシステム、計画アルゴリズム、アクチュエーションシステムはすべてデータストリームを生成する。ステートマシンはボトルネックにならずにこれらのストリームを調整しなければならない。
あなたの状態機械がセンサデータを直接処理しようとすると失敗します。他のプロセスがデータを処理するようイベントを発行すべきです。例えば:
- 状態機械: 「移動」から「スキャン」への遷移。
- 認識スレッド: 「スキャン」イベントを受け取り、カメラのフレームレートを増加する。
- 計画スレッド: 「スキャン」イベントを受け取り、軌道更新を一時停止する。
制御論理をデータ処理論理から分離することは必須です。状態機械図は、これらの受け渡しをデータ処理ステップではなく、イベントとして明確に示すべきです。
7️⃣ モジュール化による複雑さの管理 🧩
ロボットの能力が向上するにつれて、状態機械は拡大します。シンプルなピックアンドプレースロボットには5つの状態があるかもしれません。モバイルマニピュレータには50個あるかもしれません。すべての状態が他のすべての状態と相互作用する場合、50状態の機械は維持不可能です。
モジュールアプローチを採用しましょう。システムをサブシステムに分割します:
- 移動状態機械: ホイール、脚、またはトラックを処理する。
- 操作状態機械: アーム、グリッパー、またはツールを処理する。
- 通信状態機械: ネットワークのハンドシェイクとデータリンクを処理する。
これらのサブシステムはイベントを通じて通信します。これによりエンジニアの認知負荷が軽減されます。移動状態機械を操作状態機械とは独立して検証できます。このモジュール化こそが、複雑なロボティクスのための状態機械アーキテクチャをスケーラブルにする唯一の方法です。
8️⃣ ドキュメント化と保守 📝
状態機械図は生きている文書です。コードの変更、要件の変更、ハードウェアの変更が起こります。図がコードと並行して更新されなければ、誤情報になります。これにより、視覚モデルが実行可能な論理とまったく一致しなくなる「スパゲッティ図」問題が発生します。
保守のためのベストプラクティスには以下が含まれます:
- バージョン管理: 図ファイルをコードとして扱う。変更を同じ厳密さでコミットする。
- コード生成: 可能な限り、図からコードを生成するか、それらを同期させるフレームワークを使用する。
- 変更ログ: 遷移が追加または削除された際には、その理由を記録する。セーフティの修正だったのか?パフォーマンスの最適化だったのか?
ドキュメントは状態の説明にとどまらないべきです。それは、なぜ を説明すべきです。なぜこの遷移は保護されているのか?なぜこの状態がそれよりも優先されるのか?これらの決定は、元のコードを書かなかった将来のエンジニアにとって極めて重要です。
9️⃣ デザインにおける人間要因 👥
最後に、人間のオペレーターを考慮してください。状態機械はロボットの振る舞いを決定し、それが人間がロボットとどのように相互作用するかを決定します。ロボットが「作業中」状態に10分間滞在すると、オペレーターはそれが壊れていると思い、介入しようとするかもしれません。明確なステータスランプがない状態でロボットが「一時停止」に入ると、オペレーターはそれが詰まっていると誤解する可能性があります。
状態機械は人間の期待に合わせる必要があります。遷移はオペレーターが理解できるように、視覚的、音声的、または信号として明確に示されるべきです。これは技術的な図面ではしばしば見過ごされがちで、論理的な正しさに焦点が当たる一方で、ユーザー体験には注意が向けられません。論理的には正しいが、操作が分かりにくいロボットは失敗作です。
🔟 アーキテクチャの将来対応 🚀
ロボティクス技術は急速に進化しています。新しいセンサー、新しいアクチュエーター、新しいAIモデルが常に登場しています。あなたの状態機械アーキテクチャは、完全な再設計なしにこれらの変化に対応できるほど柔軟でなければなりません。
状態名をハードコードしないでください。代わりに列挙型や定数を使用してください。遷移条件をハードコードしないでください。可能な限り設定ファイルやパラメータを使用してください。これにより、論理コア全体を再コンパイルせずに動作を調整できます。また、ハードウェアにデプロイする前に、シミュレーションで異なる状態構成をテストできるようになります。
これらのアーキテクチャ的原則に注目することで、標準のUML図の限界を超えます。耐障害性があり、保守が容易で、現実の物理世界に耐えうるシステムを構築できるのです。
