











रोबोटिक्स इंजीनियर अक्सर स्वतंत्र प्रणालियों की संरचना को आत्मविश्वास के साथ शुरू करते हैं। एक सीमित स्टेट मशीन (FSM) या एक UML स्टेट मशीन डायग्राम नियंत्रण तर्क के लिए आदर्श नक्शा लगता है। यह कागज पर साफ, दृश्य और निश्चित है। हालांकि, जब इन डायग्रामों को भौतिक हार्डवेयर पर चलने वाले वास्तविक कोड में बदला जाता है, तो परिणाम अक्सर निराशाजनक होते हैं। प्रणालियाँ रुक जाती हैं, अप्रत्याशित स्थिति परिवर्तन होते हैं, और डिबगिंग एक नरक बन जाती है। अंतर डिजाइन दर्शन में नहीं है, बल्कि वातावरण और निष्पादन प्लेटफॉर्म के बारे में किए गए मान्यताओं में है। यह गाइड वास्तविक रोबोटिक्स में मानक स्टेट मशीन डायग्रामों के विफल होने के विशिष्ट तकनीकी कारणों का अध्ययन करता है और लचीले निर्माण के लिए अपनी दृष्टिकोण को कैसे समायोजित करना है, इसके बारे में बताता है।
1️⃣ भौतिक प्रणालियों में निश्चितता का भ्रम
सैद्धांतिक कंप्यूटर विज्ञान में, एक स्टेट मशीन एक निर्वात में काम करती है। स्थिति परिवर्तन तुरंत होते हैं, और इनपुट पूरी तरह से समकालीन होते हैं। हालांकि रोबोटिक्स में, भौतिक दुनिया में देरी, शोर और भिन्नता आती है। एक स्टेट मशीन डायग्राम आमतौर पर मानता है कि यदि रोबोट स्थिति A और घटना X होती है, तो यह स्थिति B में जाता है। यह तर्क सिमुलेशन में सही होता है, लेकिन हार्डवेयर ऐसे चर लाता है जिन्हें डायग्राम अक्सर नहीं ध्यान में रखते हैं।
- सिग्नल देरी: सेंसर डेटा को तुरंत रिपोर्ट नहीं करते हैं। एक दूरी सेंसर रोबोट के टकराने के 20 मिलीसेकंड बाद एक बाधा की रिपोर्ट कर सकता है। स्टेट मशीन घटना को देर से देखती है, जिससे स्थिति परिवर्तन तर्क निष्पादित करने से पहले टक्कर हो सकती है।
- घटना क्रम: एक बहु-थ्रेडेड वातावरण में, दो घटनाएं एक साथ त्रिज्या कर सकती हैं। स्टेट मशीन डायग्राम आमतौर पर उन्हें क्रमिक रूप से दिखाता है, लेकिन प्रोसेसर उन्हें अलग क्रम में संभाल सकता है, जिससे अप्रत्याशित स्थितियां बनती हैं।
- हार्डवेयर घटता है: एक मोटर अपेक्षा से अधिक धारा खींच सकती है, जिससे ऊर्जा प्रबंधन स्थिति अप्रत्याशित रूप से सक्रिय हो जाती है। डायग्राम नामांकित संचालन स्थितियों के बारे में मानता है।
इसके बचाव के लिए, आपको स्टेट मशीन को निरपेक्ष सत्य के रूप में नहीं, बल्कि एक उच्च स्तरीय संकल्पना के रूप में लेना होगा। कार्यान्वयन परत में बफरिंग, डिबाउंसिंग और समय संबंधी जांच शामिल करनी चाहिए, जो दृश्य डायग्राम स्पष्ट रूप से नहीं दिखाता है।
2️⃣ समानांतरता और समानांतर स्थितियां 🔄
मूल स्टेट मशीन डायग्रामों की सबसे महत्वपूर्ण सीमाओं में से एक उनकी रेखीय प्रकृति है। रोबोटिक्स एप्लिकेशन आंतरिक रूप से समानांतर हैं। एक रोबोट को नेविगेशन करते हुए आपातकालीन बंद कमांड के लिए सुनना, बैटरी स्तर को निगरानी करना और बेस स्टेशन के साथ संचार करते हुए एक साथ काम करना होता है। पारंपरिक क्रमिक स्टेट मशीन आपको जटिल नेस्टेड स्थितियां या स्थितियों के संयोजक विस्फोट को बनाने के लिए मजबूर करती हैं ताकि समानांतर व्यवहार को दर्शाया जा सके।
हायरार्किकल समस्या
जब आप मानक UML हायरार्की का उपयोग करके समानांतर गतिविधियों को मॉडल करने की कोशिश करते हैं, तो डायग्राम पढ़ने योग्य नहीं बन जाता है। आपको एक ‘स्पैगेटी चार्ट’ मिलता है, जहां नेविगेशन स्थिति और बैटरी स्तर के हर संयोजन के लिए एक अद्वितीय स्थिति की आवश्यकता होती है। यह दृष्टिकोण भंगुर है। यदि आप एक नया सेंसर या एक नया सुरक्षा प्रोटोकॉल जोड़ते हैं, तो आपको दर्जनों स्थितियों को फिर से लिखना होगा।
समाधान: लंबवत क्षेत्र
उन्नत स्टेट मशीन कार्यान्वयन लंबवत क्षेत्रों का समर्थन करते हैं। इससे प्रणाली को समानांतर में कई स्वतंत्र स्टेट मशीन चलाने की अनुमति मिलती है। उदाहरण के लिए:
- क्षेत्र 1:नेविगेशन (गतिशील, रुका हुआ, बाधा बचाव)
- क्षेत्र 2:ऊर्जा प्रबंधन (चार्जिंग, कम बैटरी, सामान्य)
- क्षेत्र 3:संचार (जुड़ा हुआ, अनजुड़ा हुआ, सिंकिंग)
इस क्षमता के बिना, आपका डायग्राम विफल हो रहा है क्योंकि यह प्रणाली की वास्तविक संरचना को नहीं दर्शा सकता है। दृश्य मॉडल को तार्किक निष्पादन मॉडल के साथ मेल खाना चाहिए। यदि कार्यान्वयन नियंत्रण के एक ही थ्रेड का उपयोग करता है, तो डायग्राम एक झूठ है।
3️⃣ समय और वास्तविक समय की सीमाएँ ⏱️
UML स्थिति मशीनें मूल रूप से समय सीमाओं को कोड नहीं करती हैं। वे बताती हैं कि क्या होता है, न कि कब होता है।क्याहोता है, न किजबयह होता है। रोबोटिक्स में, समय कभी-कभी तर्क से अधिक महत्वपूर्ण होता है। यदि कोई बाधा पाई जाती है, तो नेविगेशन स्थिति मशीन “आपातकालीन रोक” में संक्रमण कर सकती है। यदि निर्धारण तर्क में 100 मिलीसेकंड लगते हैं, तो रोबोट पहले से ही काफी दूर चल चुका होता है।
निम्नलिखित परिदृश्यों पर विचार करें जहाँ समय आरेख को तोड़ देता है:
- समय सीमा समाप्ति: एक स्थिति मशीन किसी संकेत के अनंत रूप से प्रतीक्षा कर सकती है। वास्तविक दुनिया में, अनंत रूप से प्रतीक्षा करना एक प्रणाली विफलता है। टाइमर को स्पष्ट रूप से निर्दिष्ट करना आवश्यक है।
- स्कैन दरें: सेंसर निश्चित अंतराल पर स्कैन करते हैं। एक स्थिति संक्रमण स्कैन चक्करों के बीच तब निर्देशित हो सकता है, जिससे तर्क पूरी तरह से घटना को छोड़ देता है।
- झिलमिलाहट: ऑपरेटिंग सिस्टम योजना देरी का कारण बन सकती है। यदि आधारभूत ऑपरेटिंग प्रणाली 50ms की झिलमिलाहट लाती है, तो 1ms निर्दिष्टता के लिए डिज़ाइन की गई स्थिति मशीन विफल हो जाएगी।
रोबोटिक्स के लिए प्रभावी आरेखों में स्थितियों को समय सीमाओं के साथ टिप्पणी करना आवश्यक है। यदि किसी स्थिति के लिए 50ms का प्रतिक्रिया खंड आवश्यक है, तो आरेख में उस सीमा को दर्शाना चाहिए, भले ही सॉफ्टवेयर कार्यान्वयन इसे अलग तरीके से संभाले।
4️⃣ त्रुटि संभाल और अपूर्णता प्रतिरोध 🛑
अधिकांश स्थिति मशीन आरेख खुशहाल रास्ते पर ध्यान केंद्रित करते हैं। वे दिखाते हैं कि रोबोट स्टार्ट से गोल तक कैसे जाता है। वे कभी-कभी यह नहीं दिखाते कि जब बाजू का मोटर जल जाता है, वाई-फाई गिर जाता है, या बैटरी वोल्टेज सुरक्षित स्तर से नीचे आ जाता है। सॉफ्टवेयर में, त्रुटियाँ अपवाद होती हैं। रोबोटिक्स में, त्रुटियाँ ब्रह्मांड की मूल स्थिति हैं।
त्रुटि स्थितियाँ गायब
यदि आपके आरेख में विफलता के तरीकों को स्पष्ट रूप से मॉडल नहीं किया गया है, तो आपकी प्रणाली नाजुक है। आपको निम्नलिखित स्थितियों की आवश्यकता होगी:
- सेंसर विफलता: यदि लिडार डेटा वापस नहीं करता है, तो क्या होगा?
- एक्यूटेटर बंद होना: यदि एक पहिया शारीरिक रूप से फंस जाता है, तो क्या होगा?
- तर्क समय सीमा समाप्ति: यदि रोबोट एक लूप में फंस जाता है, तो क्या होगा?
सुरक्षा जाल
टिकाऊ प्रणालियाँ एक सार्वभौमिक त्रुटि स्थिति को लागू करती हैं जिसमें किसी भी स्थिति से प्रवेश किया जा सकता है। इसे अक्सर “वॉचडॉग” या “सुरक्षित मोड” स्थिति कहा जाता है। यदि कोई भी तर्क शाखा लटक जाती है या अमान्य डेटा उत्पन्न करती है, तो प्रणाली को इस सुरक्षित स्थिति में संक्रमण करने के लिए बाध्य करना चाहिए। एक मानक आरेख अक्सर इसे कार्यान्वयन विवरणों के पीछे छिपा देता है, जिससे यह रुचि रखने वालों और भविष्य के रखरखाव कर्मियों के लिए अदृश्य हो जाता है।
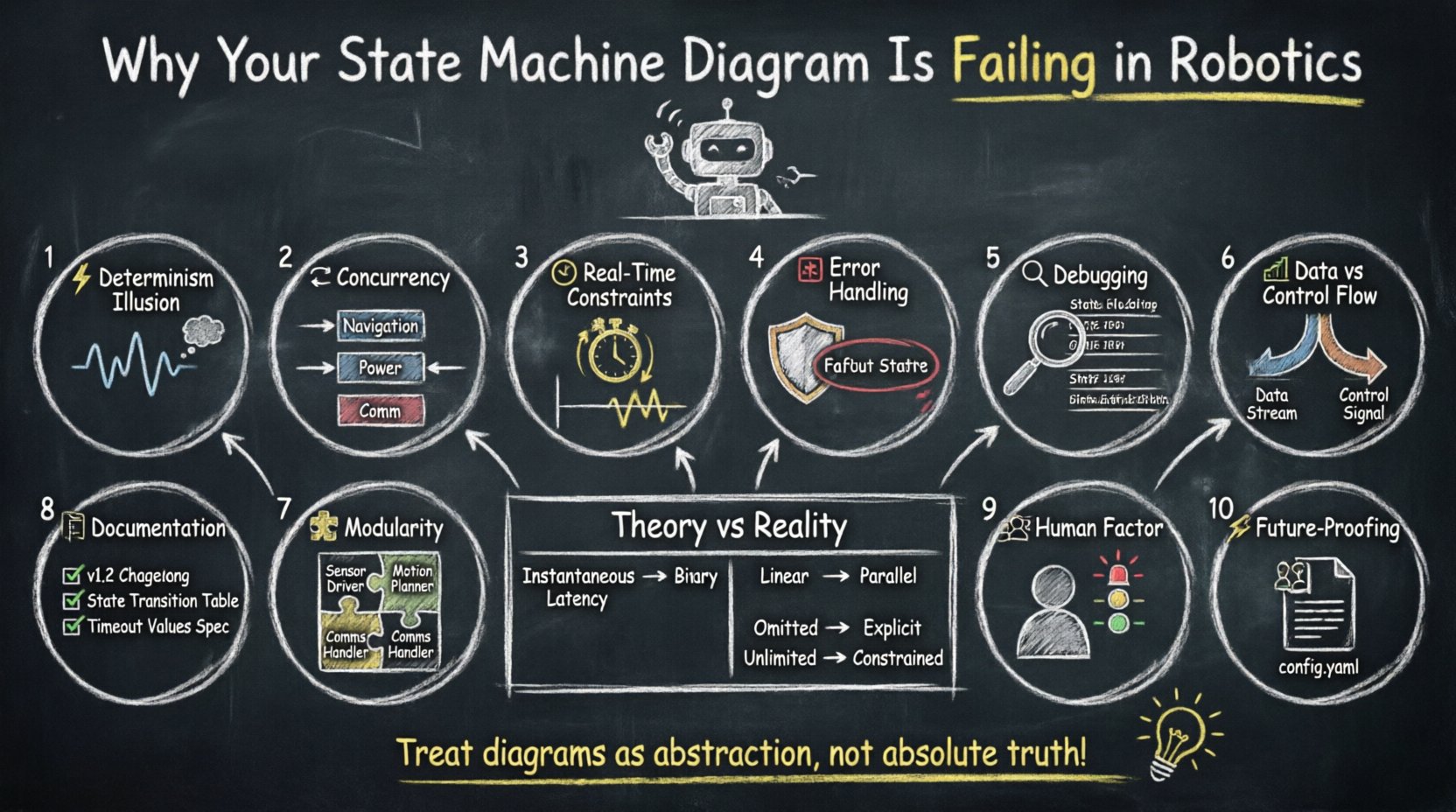
| विशेषता | सैद्धांतिक आरेख | वास्तविक दुनिया का कार्यान्वयन |
|---|---|---|
| संक्रमण | तत्कालिक | लेटेंसी और जिटर के अधीन |
| इनपुट | बाइनरी (सत्य/असत्य) | शोर, एनालॉग या गायब डेटा |
| समानांतरता | रैखिक या नेस्टेड | समानांतर थ्रेड और प्रक्रियाएँ |
| त्रुटियाँ | अक्सर छोड़ दिया जाता है | स्पष्ट और प्राथमिकता देने वाले होने चाहिए |
| मेमोरी | असीमित | एम्बेडेड हार्डवेयर द्वारा सीमित |
5️⃣ डीबगिंग और विज़ुअलाइज़ेशन की चुनौतियाँ 🔍
जब एक स्टेट मशीन उत्पादन में विफल होती है, तो डीबगिंग कठिन होती है। मानक आरेख स्थिर दस्तावेज़ होते हैं। वे स्टेट्स के इतिहास को नहीं दिखाते। वे इवेंट्स के समय को नहीं दिखाते। वे उन डेटा मानों को नहीं दिखाते जिन्होंने एक संक्रमण को ट्रिगर किया।
रोबोटिक्स में स्टेट मशीन को डीबग करने योग्य बनाने के लिए, आपको चाहिए:
- स्टेट लॉगिंग: प्रत्येक संक्रमण को समयचिह्न और संबंधित चरों के मान के साथ लॉग किया जाना चाहिए।
- इतिहास स्टेट्स: आरेख को “इतिहास” संक्रमण का समर्थन करना चाहिए। यदि रोबोट स्टेट A में था, स्टेट B में गया, और फिर स्टेट B गिर गया, तो इसे स्टेट A में वापस लौटना चाहिए, न कि एक डिफ़ॉल्ट स्टेट में।
- ट्रेसेबिलिटी: कोड को आरेख तक वापस ट्रेस किया जा सकना चाहिए। यदि एक संक्रमण तर्क जटिल है, तो आरेख को शर्त की व्याख्या करनी चाहिए, केवल तीर की नहीं।
इन उपकरणों के बिना, आरेख सिर्फ एक चित्र है। यह एक विनिर्देश नहीं है। इंजीनियर विज़ुअल मॉडल के संदर्भ के बिना कोड में तर्क सीधे लिखने की ओर लौट जाएंगे, जिससे आरेख अप्रासंगिक हो जाता है।
6️⃣ डेटा फ्लो बनाम कंट्रोल फ्लो 📊
एक सामान्य गलती यह है कि कंट्रोल फ्लो को डेटा फ्लो से भ्रमित करना। स्टेट मशीन रोबोट के मोड को नियंत्रित करती हैं, लेकिन वे डेटा का प्रबंधन नहीं करती हैं। रोबोट की पेरिसेप्शन सिस्टम, प्लानिंग एल्गोरिदम और एक्ट्यूएशन सिस्टम सभी डेटा स्ट्रीम उत्पन्न करते हैं। स्टेट मशीन को इन स्ट्रीम्स को बिना बॉटलनेक के नियंत्रित करना चाहिए।
यदि आपकी राज्य मशीन सेंसर डेटा को सीधे प्रोसेस करने की कोशिश करती है, तो वह विफल हो जाएगी। इसे ऐसी घटनाओं को ट्रिगर करना चाहिए जो अन्य प्रक्रियाओं को डेटा को हैंडल करने के लिए प्रेरित करें। उदाहरण के लिए:
- राज्य मशीन: “गतिशील” से “स्कैनिंग” में संक्रमण।
- पेरसेप्शन थ्रेड: “स्कैनिंग” घटना प्राप्त करता है और कैमरा फ्रेम दर बढ़ाता है।
- प्लानिंग थ्रेड: “स्कैनिंग” घटना प्राप्त करता है और ट्रैजेक्टरी अपडेट्स रोकता है।
नियंत्रण तर्क को डेटा प्रोसेसिंग तर्क से अलग करना आवश्यक है। राज्य मशीन आरेख में इन हैंडऑफ्स को घटनाओं के रूप में दिखाना चाहिए, डेटा प्रोसेसिंग चरणों के रूप में नहीं।
7️⃣ मॉड्यूलरिटी के साथ जटिलता का प्रबंधन 🧩
जैसे-जैसे रोबोट अधिक क्षमताशाली होता है, राज्य मशीन बढ़ती है। एक सरल पिक-एंड-प्लेस रोबोट में पांच राज्य हो सकते हैं। एक मोबाइल मैनिपुलेटर में पचास हो सकते हैं। यदि प्रत्येक राज्य प्रत्येक अन्य राज्य के साथ बातचीत करता है, तो पचास-राज्य वाली मशीन को बनाए रखना असंभव है।
एक मॉड्यूलर दृष्टिकोण अपनाएं। प्रणाली को उपप्रणालियों में बांटें:
- लोकोमोशन राज्य मशीन: पहियों, पैरों या ट्रैक्स को हैंडल करता है।
- मैनिपुलेशन राज्य मशीन: बाजू, ग्रिपर या उपकरणों को हैंडल करता है।
- संचार राज्य मशीन: नेटवर्क हैंडशेक और डेटा लिंक को हैंडल करता है।
इन उपप्रणालियों के बीच घटनाओं के माध्यम से संचार होता है। इससे इंजीनियर पर मानसिक भार कम होता है। आप लोकोमोशन राज्य मशीन की जांच मैनिपुलेशन राज्य मशीन से स्वतंत्र रूप से कर सकते हैं। यह मॉड्यूलरिटी जटिल रोबोटिक्स के लिए राज्य मशीन आर्किटेक्चर को स्केल करने का एकमात्र तरीका है।
8️⃣ दस्तावेजीकरण और रखरखाव 📝
एक राज्य मशीन आरेख एक जीवित दस्तावेज है। कोड में परिवर्तन होते हैं, आवश्यकताएं बदलती हैं, और हार्डवेयर में बदलाव आते हैं। यदि आरेख को कोड के साथ अपडेट नहीं किया जाता है, तो यह गलत जानकारी बन जाता है। इससे “स्पैगेटी आरेख” समस्या उत्पन्न होती है जहां दृश्य मॉडल निष्पाद्य तर्क से कोई संबंध नहीं रखता है।
रखरखाव के लिए सर्वोत्तम व्यवहार शामिल हैं:
- संस्करण नियंत्रण:आरेख फ़ाइल को कोड के रूप में लें। बदलाव को उसी लगन से कमिट करें।
- कोड उत्पादन: जहां संभव हो, आरेख से कोड उत्पन्न करें या एक फ्रेमवर्क का उपयोग करें जो उन्हें सिंक में रखे।
- परिवर्तन लॉग: जब कोई संक्रमण जोड़ा या हटाया जाता है, तो कारण का विवरण दर्ज करें। क्या यह सुरक्षा सुधार था? क्या यह प्रदर्शन अनुकूलन था?
दस्तावेजीकरण केवल राज्यों का वर्णन नहीं करना चाहिए। इसमें वर्णन करना चाहिए क्यों। इस संक्रमण को क्यों सुरक्षित किया गया है? इस राज्य को उस राज्य की तुलना में प्राथमिकता क्यों दी गई है? ये निर्णय भविष्य के इंजीनियरों के लिए महत्वपूर्ण हैं जिन्होंने मूल कोड नहीं लिखा है।
9️⃣ डिज़ाइन में मानव कारक 👥
अंत में, मानव ऑपरेटर को ध्यान में रखें। राज्य मशीन रोबोट के व्यवहार को निर्धारित करती है, जो मानवों के इसके साथ बर्ताव को निर्धारित करती है। यदि रोबोट 10 मिनट तक ‘व्यस्त’ स्थिति में जाता है, तो ऑपरेटर को लग सकता है कि यह खराब हो गया है और इसमें हस्तक्षेप करने की कोशिश करेगा। यदि रोबोट ‘रोका गया’ स्थिति में बिना स्पष्ट स्थिति प्रकाश के जाता है, तो ऑपरेटर इसे फंसा हुआ मान सकता है।
राज्य मशीन को मानव अपेक्षाओं के अनुरूप होना चाहिए। संक्रमण को दृश्य, श्रव्य या इस तरह से संकेतित किया जाना चाहिए कि मानव ऑपरेटर समझ सके। इस बात को तकनीकी आरेखों में अक्सर नजरअंदाज किया जाता है, जो तर्क सही होने पर ध्यान केंद्रित करते हैं, बजाय उपयोगकर्ता अनुभव के। एक रोबोट जो तार्किक रूप से सही है लेकिन संचालन में भ्रमित करने वाला है, एक विफल उत्पाद है।
🔟 अपनी वास्तुकला को भविष्य के लिए तैयार करना 🚀
रोबोटिक्स तकनीक तेजी से विकसित हो रही है। नए सेंसर, नए एक्चुएटर और नए एआई मॉडल लगातार पेश किए जा रहे हैं। आपकी राज्य मशीन वास्तुकला इन बदलावों को बिना पूरी तरह से लिखे फिर से लेने के लिए पर्याप्त लचीली होनी चाहिए।
राज्य के नाम को कड़े ढंग से कोड करने से बचें। इनमें से उपयोग करें या स्थिरांक का उपयोग करें। संक्रमण की शर्तों को कड़े ढंग से कोड करने से बचें। जहां संभव हो, कॉन्फ़िगरेशन फ़ाइलों या पैरामीटर का उपयोग करें। इससे आप पूरे तर्क कोड को फिर से संकलित किए बिना व्यवहार को समायोजित कर सकते हैं। इसके अलावा, आप हार्डवेयर पर डेप्लॉय करने से पहले सिमुलेशन में विभिन्न राज्य व्यवस्थाओं का परीक्षण कर सकते हैं।
इन वास्तुकला सिद्धांतों पर ध्यान केंद्रित करके, आप मानक UML आरेख की सीमाओं से आगे बढ़ते हैं। आप एक ऐसी प्रणाली बनाते हैं जो लचीली, रखरखाव योग्य और भौतिक दुनिया के लिए पर्याप्त रूप से मजबूत है।
