











Инженеры робототехники часто начинают архитектуру автономных систем с чувством уверенности. Конечный автомат (FSM) или диаграмма состояний UML кажется идеальным чертежом для логики управления. На бумаге он чистый, визуальный и детерминированный. Однако, когда эти диаграммы переводятся в реальный код, работающий на физическом оборудовании, результаты часто разочаровывают. Системы зависают, происходят неожиданные переходы, отладка превращается в кошмар. Разрыв возникает не из-за самой философии проектирования, а из-за допущений, сделанных относительно среды и платформы выполнения. В этом руководстве рассматриваются конкретные технические причины, по которым стандартные диаграммы конечных автоматов сталкиваются с трудностями в реальной робототехнике, и как скорректировать ваш подход для надежного развертывания.
1️⃣ Иллюзия детерминизма в физических системах
В теоретической информатике конечный автомат работает в вакууме. Переходы мгновенны, а входные сигналы идеально синхронизированы. В робототехнике, однако, физический мир вводит задержки, шум и вариабельность. Диаграмма конечного автомата обычно предполагает, что если робот находится в Состоянии A и Событие X происходит, он переходит в Состояние B. Эта логика верна в симуляции, но аппаратное обеспечение вводит переменные, которые диаграммы редко учитывают.
- Задержка сигнала:Датчики не сообщают данные мгновенно. Датчик расстояния может зафиксировать препятствие через 20 миллисекунд после того, как робот столкнется с ним. Конечный автомат увидит событие с опозданием, что может привести к столкновению до выполнения логики перехода.
- Порядок событий:В многопоточной среде два события могут произойти одновременно. Диаграмма конечного автомата обычно показывает их последовательно, но процессор может обработать их в другом порядке, что приведет к нежелательным состояниям.
- Деградация оборудования: Двигатель может потреблять больше тока, чем ожидается, что вызовет неожиданный переход в состояние управления питанием. Диаграмма предполагает номинальные условия работы.
Чтобы смягчить это, вы должны рассматривать конечный автомат не как абсолютную истину, а как высокоуровневую абстракцию. Уровень реализации должен включать буферизацию, подавление дребезга и проверки времени, которые визуальная диаграмма явно не показывает.
2️⃣ Параллелизм и параллельные состояния 🔄
Одно из наиболее значимых ограничений базовых диаграмм конечных автоматов — их линейная природа. Приложения робототехники по своей сути параллельны. Робот должен навигировать, одновременно слушая команды аварийной остановки, контролируя уровень заряда батареи и обмениваться данными с базовой станцией. Традиционные последовательные конечные автоматы вынуждают создавать сложные вложенные состояния или комбинаторный взрыв состояний для представления параллельного поведения.
Проблема иерархии
Когда вы пытаетесь моделировать параллельные действия с помощью стандартной иерархии UML, диаграмма становится непонятной. Вы получаете «спагетти-диаграмму», где каждая комбинация состояния навигации и уровня заряда батареи требует уникального состояния. Такой подход хрупкий. Если вы добавите новый датчик или новый протокол безопасности, вам придется переписать десятки состояний.
Решение: ортогональные области
Расширенные реализации конечных автоматов поддерживают ортогональные области. Это позволяет системе одновременно выполнять несколько независимых конечных автоматов. Например:
- Область 1:Навигация (Движение, Остановка, Обход препятствий)
- Область 2:Управление питанием (Зарядка, Низкий заряд, Нормальный)
- Область 3:Связь (Подключено, Отключено, Синхронизация)
Без этой возможности ваша диаграмма не работает, потому что не может отразить истинную архитектуру системы. Визуальная модель должна соответствовать логической модели выполнения. Если реализация использует единственный поток управления, диаграмма — это ложь.
3️⃣ Временные параметры и ограничения в реальном времени ⏱️
Машины состояний UML не встроенно кодируют временные ограничения. Они описывают чтопроисходит, а не когдаоно происходит. В робототехнике временные параметры часто важнее логики. Машина состояний навигации может перейти в состояние «Аварийная остановка», если обнаружен препятствие. Если логика обнаружения занимает 100 миллисекунд, робот уже значительно сместился.
Рассмотрим следующие сценарии, при которых временные параметры нарушают диаграмму:
- Тайм-ауты: Машина состояний может бесконечно ждать сигнала. В реальном мире бесконечное ожидание — это сбой системы. Таймеры должны быть явными.
- Скорость сканирования: Датчики сканируют с определёнными интервалами. Переход состояния может быть вызван между циклами сканирования, что приведёт к тому, что логика полностью пропустит событие.
- Джиттер: Планирование операционной системы может вызывать задержки. Машина состояний, рассчитанная на точность 1 мс, не будет работать, если базовая ОС вносит джиттер в 50 мс.
Эффективные диаграммы для робототехники должны снабжать состояния временным требованием. Если состояние требует окна ответа в 50 мс, диаграмма должна отражать это ограничение, даже если программная реализация обрабатывает его отдельно.
4️⃣ Обработка ошибок и отказоустойчивость 🛑
Большинство диаграмм машин состояний фокусируются на «счастливом пути». Они показывают, как робот перемещается от стартового состояния к цели. Редко они показывают, что происходит, когда выходит из строя двигатель руки, пропадает Wi-Fi или напряжение батареи падает ниже безопасного уровня. В программном обеспечении ошибки — это исключения. В робототехнике ошибки — это исходное состояние вселенной.
Отсутствующие состояния ошибок
Если ваша диаграмма не явно моделирует режимы отказов, ваша система хрупкая. Вам нужны состояния для:
- Сбой датчика: Что, если лидар перестанет возвращать данные?
- Заблокированный исполнительный механизм: Что, если колесо физически застряло?
- Тайм-аут логики: Что, если робот застрянет в цикле?
Сеть безопасности
Надёжные системы реализуют глобальное состояние ошибки, которое может быть активировано из любого состояния. Это часто называют «Сторожевым пёсом» или «Режимом безопасности». Если любой фрагмент логики зависает или генерирует недопустимые данные, система должна принудительно перейти в это безопасное состояние. Стандартная диаграмма часто скрывает это за деталями реализации, делая его невидимым для заинтересованных сторон и будущих сопровождающих.
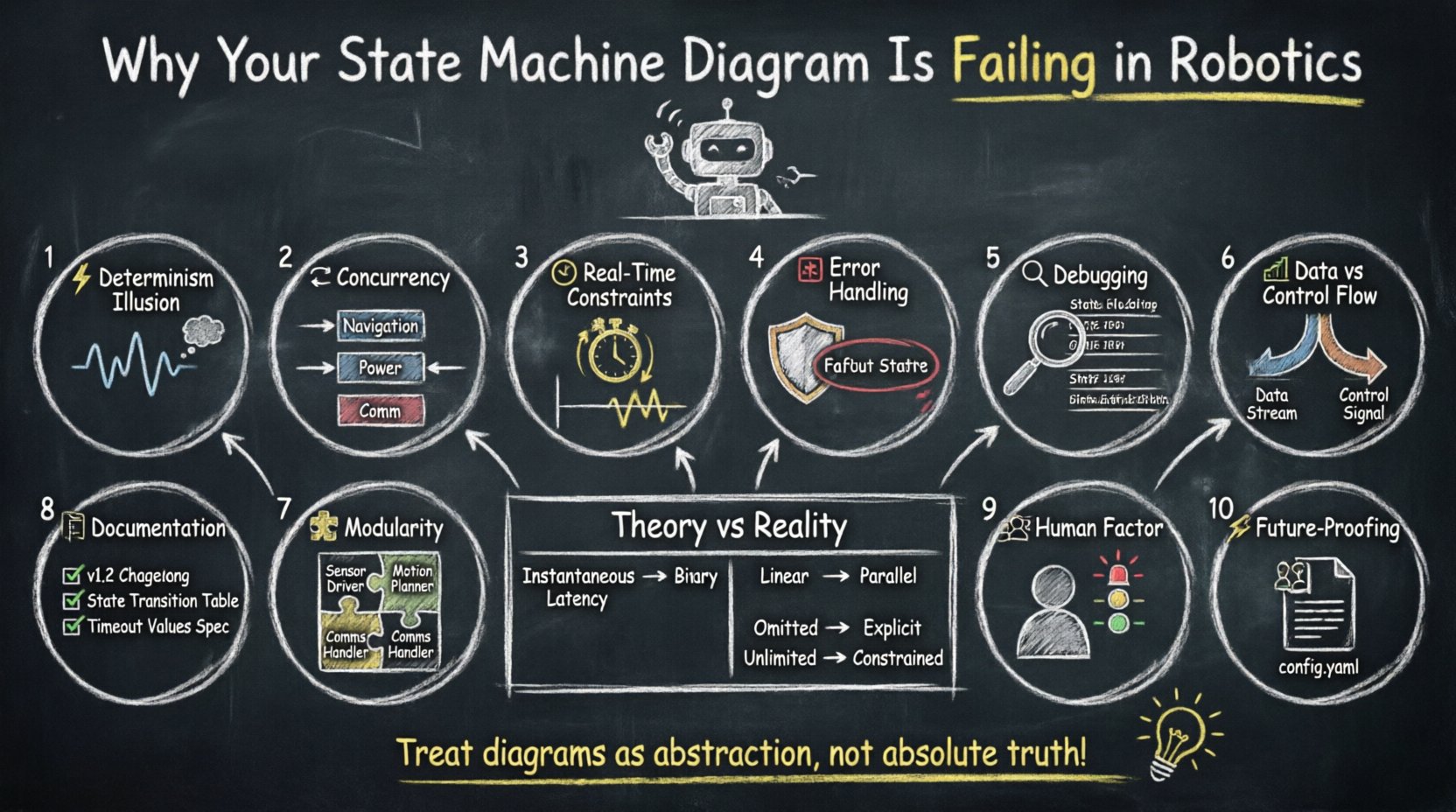
| Функция | Теоретическая диаграмма | Реализация в реальном мире |
|---|---|---|
| Переходы | Мгновенный | Подвержен задержкам и джиттеру |
| Входы | Бинарный (Истина/Ложь) | Шумные, аналоговые или отсутствующие данные |
| Параллелизм | Линейный или вложенный | Параллельные потоки и процессы |
| Ошибки | Часто опускаются | Должны быть явными и приоритетными |
| Память | Неограниченная | Ограничена встроенным оборудованием |
5️⃣ Проблемы отладки и визуализации 🔍
Когда машина состояний выходит из строя в рабочей среде, отладка затруднена. Стандартные диаграммы — это статические документы. Они не показывают историю состояний. Они не показывают временные метки событий. Они не показывают значения данных, которые вызвали переход.
Чтобы сделать машины состояний отладочными в робототехнике, вам нужно:
- Ведение журнала состояний: Каждый переход должен быть зафиксирован с временной меткой и значениями соответствующих переменных.
- Состояния истории: Диаграмма должна поддерживать переходы «История». Если робот находился в состоянии A, перешел в состояние B, а затем состояние B вышло из строя, он должен знать, что вернуться в состояние A, а не в состояние по умолчанию.
- Следуемость: Код должен быть отслеживаемым до диаграммы. Если логика перехода сложная, диаграмма должна объяснять условие, а не просто стрелку.
Без этих инструментов диаграмма — это просто рисунок. Это не спецификация. Инженеры вернутся к написанию логики непосредственно в коде, не обращаясь к визуальной модели, что сделает диаграмму устаревшей.
6️⃣ Поток данных против потока управления 📊
Частая ошибка — путать поток управления с потоком данных. Машины состояний управляют режимом робота, но они не управляют данными. Система восприятия робота, алгоритм планирования и система привода генерируют потоки данных. Машина состояний должна координировать эти потоки, не становясь узким местом.
Если ваш конечный автомат пытается обрабатывать данные датчиков непосредственно, он не будет работать. Он должен генерировать события, которые вызывают другие процессы для обработки данных. Например:
- Конечный автомат: Переходы из состояния «Движение» в состояние «Сканирование».
- Поток восприятия: Получает событие «Сканирование» и увеличивает частоту кадров камеры.
- Поток планирования: Получает событие «Сканирование» и приостанавливает обновления траектории.
Отделение логики управления от логики обработки данных является обязательным. Диаграмма конечного автомата должна четко показывать эти передачи как события, а не как шаги обработки данных.
7️⃣ Управление сложностью с помощью модульности 🧩
По мере того как робот становится более способным, конечный автомат растет. Простой робот для захвата и размещения может иметь пять состояний. Мобильный манипулятор может иметь пятьдесят. Пятидесятисостоянийый автомат невозможно поддерживать, если каждое состояние взаимодействует со всеми остальными.
Примите модульный подход. Разбейте систему на подсистемы:
- Конечный автомат передвижения: Обрабатывает колеса, ноги или гусеницы.
- Конечный автомат манипуляции: Обрабатывает руки, захваты или инструменты.
- Конечный автомат связи: Обрабатывает сетевые рукопожатия и соединения данных.
Эти подсистемы общаются через события. Это снижает когнитивную нагрузку на инженера. Вы можете проверить конечный автомат передвижения независимо от конечного автомата манипуляции. Эта модульность — единственный способ масштабировать архитектуры конечных автоматов для сложной робототехники.
8️⃣ Документирование и сопровождение 📝
Диаграмма конечного автомата — это живой документ. Изменяется код, меняются требования и аппаратные средства. Если диаграмма не обновляется вместе с кодом, она становится источником ложной информации. Это приводит к проблеме «спагетти-диаграммы», когда визуальная модель не соответствует исполняемой логике.
Наилучшие практики сопровождения включают:
- Контроль версий: Рассматривайте файл диаграммы как код. Вносите изменения с той же строгостью.
- Генерация кода: По возможности генерируйте код из диаграммы или используйте фреймворк, который поддерживает их синхронизацию.
- Журналы изменений: Когда переход добавляется или удаляется, документируйте причину. Это была исправление безопасности? Оптимизация производительности?
Документация не должна просто описывать состояния. Она должна описывать почему. Почему этот переход защищен? Почему это состояние имеет приоритет перед другим? Эти решения критически важны для будущих инженеров, которые не писали исходный код.
9️⃣ Человеческий фактор в проектировании 👥
Наконец, учтите человеческого оператора. Машина состояний определяет поведение робота, что, в свою очередь, определяет, как люди взаимодействуют с ним. Если робот входит в состояние «Занят» на 10 минут, оператор может подумать, что он сломан, и попытаться вмешаться. Если робот переходит в состояние «Пауза» без четкого индикатора состояния, оператор может предположить, что он застрял.
Машина состояний должна соответствовать ожиданиям человека. Переходы должны быть видимыми, слышимыми или сигнализироваться так, чтобы оператор понял. Часто это игнорируется на технических диаграммах, которые сосредоточены исключительно на логической корректности, а не на пользовательском опыте. Робот, который логически правилен, но труден в управлении, — это неудачный продукт.
🔟 Защита архитектуры от будущих изменений 🚀
Технологии робототехники быстро развиваются. Постоянно появляются новые датчики, новые приводы и новые модели ИИ. Архитектура машины состояний должна быть достаточно гибкой, чтобы учитывать эти изменения без полной переписи.
Избегайте жесткой привязки имён состояний. Используйте перечисления или константы. Избегайте жесткой привязки условий переходов. Где возможно, используйте файлы конфигурации или параметры. Это позволяет настраивать поведение без перекомпиляции всей логической основы. Также это позволяет тестировать различные конфигурации состояний в симуляции перед развертыванием на аппаратное обеспечение.
Фокусируясь на этих архитектурных принципах, вы выходите за рамки ограничений стандартной диаграммы UML. Вы создаете систему, которая устойчива, поддерживаема и достаточно надежна для реального мира.
