











Các kỹ sư robot thường bắt đầu kiến trúc hệ thống tự động với sự tự tin. Một Máy trạng thái hữu hạn (FSM) hoặc sơ đồ Máy trạng thái UML dường như là bản vẽ lý tưởng cho logic điều khiển. Nó sạch sẽ, trực quan và xác định rõ ràng trên giấy. Tuy nhiên, khi những sơ đồ này được chuyển đổi thành mã thực tế chạy trên phần cứng vật lý, kết quả thường thất vọng. Hệ thống bị treo, các chuyển trạng thái bất ngờ xảy ra, và việc gỡ lỗi trở thành ác mộng. Khoảng cách này không nằm ở triết lý thiết kế bản thân, mà nằm ở những giả định được đưa ra về môi trường và nền tảng thực thi. Hướng dẫn này khám phá những lý do kỹ thuật cụ thể tại sao sơ đồ máy trạng thái tiêu chuẩn gặp khó khăn trong thực tế robot và cách điều chỉnh cách tiếp cận để triển khai bền vững.
1️⃣ Ảo ảnh về tính xác định trong các hệ thống vật lý
Trong khoa học máy tính lý thuyết, một máy trạng thái hoạt động trong chân không. Các chuyển tiếp xảy ra tức thì, và đầu vào được đồng bộ hoàn hảo. Tuy nhiên, trong robot, thế giới vật lý mang lại độ trễ, nhiễu và sự biến động. Một sơ đồ máy trạng thái thường giả định rằng nếu robot đang ở trạng tháiTrạng thái A và Sự kiện X xảy ra, nó sẽ chuyển sang Trạng thái B. Logic này đúng trong mô phỏng, nhưng phần cứng mang lại những biến số mà sơ đồ hiếm khi ghi nhận.
- Độ trễ tín hiệu:Các cảm biến không báo dữ liệu ngay lập tức. Một cảm biến khoảng cách có thể báo vật cản sau 20 mili giây kể từ khi robot va chạm. Máy trạng thái nhận sự kiện muộn, có thể dẫn đến va chạm trước khi logic chuyển trạng thái được thực thi.
- Thứ tự sự kiện:Trong môi trường đa luồng, hai sự kiện có thể kích hoạt đồng thời. Sơ đồ máy trạng thái thường thể hiện chúng theo thứ tự tuần tự, nhưng bộ xử lý có thể xử lý chúng theo thứ tự khác, dẫn đến các trạng thái không mong muốn.
- Suy giảm phần cứng:Động cơ có thể tiêu thụ dòng điện nhiều hơn dự kiến, khiến trạng thái quản lý nguồn điện kích hoạt một cách bất ngờ. Sơ đồ giả định điều kiện hoạt động tiêu chuẩn.
Để giảm thiểu điều này, bạn phải coi máy trạng thái không phải là sự thật tuyệt đối, mà là một trừu tượng cấp cao. Lớp triển khai phải bao gồm các chức năng như đệm, loại bỏ nhiễu và kiểm tra thời gian, những thứ mà sơ đồ trực quan không thể hiện rõ ràng.
2️⃣ Tính đồng thời và các trạng thái song song 🔄
Một trong những hạn chế lớn nhất của sơ đồ máy trạng thái cơ bản là bản chất tuyến tính của chúng. Các ứng dụng robot vốn dĩ là đồng thời. Một robot phải di chuyển trong khi lắng nghe lệnh dừng khẩn cấp, theo dõi mức pin và giao tiếp với trạm cơ sở đồng thời. Máy trạng thái tuần tự truyền thống buộc bạn phải tạo ra các trạng thái lồng ghép phức tạp hoặc sự bùng nổ tổ hợp trạng thái để biểu diễn các hành vi song song.
Vấn đề về cấu trúc phân cấp
Khi bạn cố gắng mô hình hóa các hoạt động song song bằng cấu trúc phân cấp UML tiêu chuẩn, sơ đồ trở nên khó đọc. Bạn kết thúc bằng một sơ đồ ‘bánh mì xào’ nơi mỗi tổ hợp giữa trạng thái điều hướng và mức pin đều yêu cầu một trạng thái riêng biệt. Cách tiếp cận này rất dễ gãy. Nếu bạn thêm một cảm biến mới hoặc một quy trình an toàn mới, bạn phải viết lại hàng chục trạng thái.
Giải pháp: Các vùng vuông góc
Các triển khai máy trạng thái tiên tiến hỗ trợ các vùng vuông góc. Điều này cho phép hệ thống chạy nhiều máy trạng thái độc lập song song. Ví dụ:
- Vùng 1:Điều hướng (Đang di chuyển, Đang dừng, Tránh vật cản)
- Vùng 2:Quản lý nguồn (Đang sạc, Pin yếu, Bình thường)
- Vùng 3:Giao tiếp (Kết nối, Ngắt kết nối, Đồng bộ)
Không có khả năng này, sơ đồ của bạn đang thất bại vì nó không thể biểu diễn kiến trúc thực sự của hệ thống. Mô hình trực quan phải phù hợp với mô hình thực thi logic. Nếu triển khai sử dụng một luồng điều khiển duy nhất, thì sơ đồ đó là một lời dối trá.
3️⃣ Thời gian và các ràng buộc thời gian thực ⏱️
Máy trạng thái UML không mã hóa các ràng buộc thời gian một cách bản địa. Chúng mô tả điều gìxảy ra, chứ không phải khi nàonó xảy ra. Trong robot, thời gian thường quan trọng hơn logic. Một máy trạng thái điều hướng có thể chuyển sang “Dừng khẩn cấp” nếu phát hiện vật cản. Nếu logic phát hiện mất 100 mili giây, robot đã di chuyển đáng kể.
Hãy xem xét các tình huống sau đây mà thời gian làm hỏng sơ đồ:
- Hạn chót: Một máy trạng thái có thể chờ vô hạn cho một tín hiệu. Trên thực tế, việc chờ đợi vô hạn là sự cố hệ thống. Bộ đếm thời gian phải được xác định rõ ràng.
- Tốc độ quét: Các cảm biến quét theo các khoảng thời gian cụ thể. Một chuyển trạng thái có thể được kích hoạt giữa các chu kỳ quét, khiến logic bỏ lỡ sự kiện hoàn toàn.
- Sự dao động: Lập lịch hệ điều hành có thể gây ra độ trễ. Một máy trạng thái được thiết kế cho độ chính xác 1ms sẽ thất bại nếu hệ điều hành nền gây ra độ dao động 50ms.
Các sơ đồ hiệu quả cho robot phải ghi chú các trạng thái với yêu cầu về thời gian. Nếu một trạng thái yêu cầu khung thời gian phản hồi 50ms, sơ đồ phải phản ánh ràng buộc đó, ngay cả khi triển khai phần mềm xử lý nó riêng biệt.
4️⃣ Xử lý lỗi và khả năng chịu lỗi 🛑
Hầu hết các sơ đồ máy trạng thái tập trung vào con đường thuận lợi. Chúng cho thấy robot di chuyển từ Bắt đầu đến Mục tiêu như thế nào. Chúng hiếm khi mô tả điều gì xảy ra khi động cơ tay bị cháy, Wi-Fi ngắt kết nối, hoặc điện áp pin giảm xuống dưới mức an toàn. Trong phần mềm, lỗi là ngoại lệ. Trong robot, lỗi là trạng thái mặc định của vũ trụ.
Thiếu các trạng thái lỗi
Nếu sơ đồ của bạn không mô hình hóa rõ ràng các chế độ lỗi, hệ thống của bạn sẽ dễ bị tổn thương. Bạn cần các trạng thái cho:
- Lỗi cảm biến: Điều gì sẽ xảy ra nếu lidar ngừng trả về dữ liệu?
- Khóa bộ chấp hành: Điều gì sẽ xảy ra nếu một bánh xe bị kẹt vật lý?
- Hạn chót logic: Điều gì sẽ xảy ra nếu robot bị kẹt trong một vòng lặp?
Lưới an toàn
Các hệ thống mạnh mẽ triển khai một trạng thái lỗi toàn cục có thể được vào từ bất kỳ trạng thái nào. Điều này thường được gọi là trạng thái “Bảo vệ giám sát” hoặc “Chế độ an toàn”. Nếu bất kỳ nhánh logic nào bị treo hoặc tạo ra dữ liệu không hợp lệ, hệ thống phải buộc chuyển sang trạng thái an toàn này. Một sơ đồ tiêu chuẩn thường che giấu điều này đằng sau chi tiết triển khai, khiến nó trở nên vô hình với các bên liên quan và những người bảo trì trong tương lai.
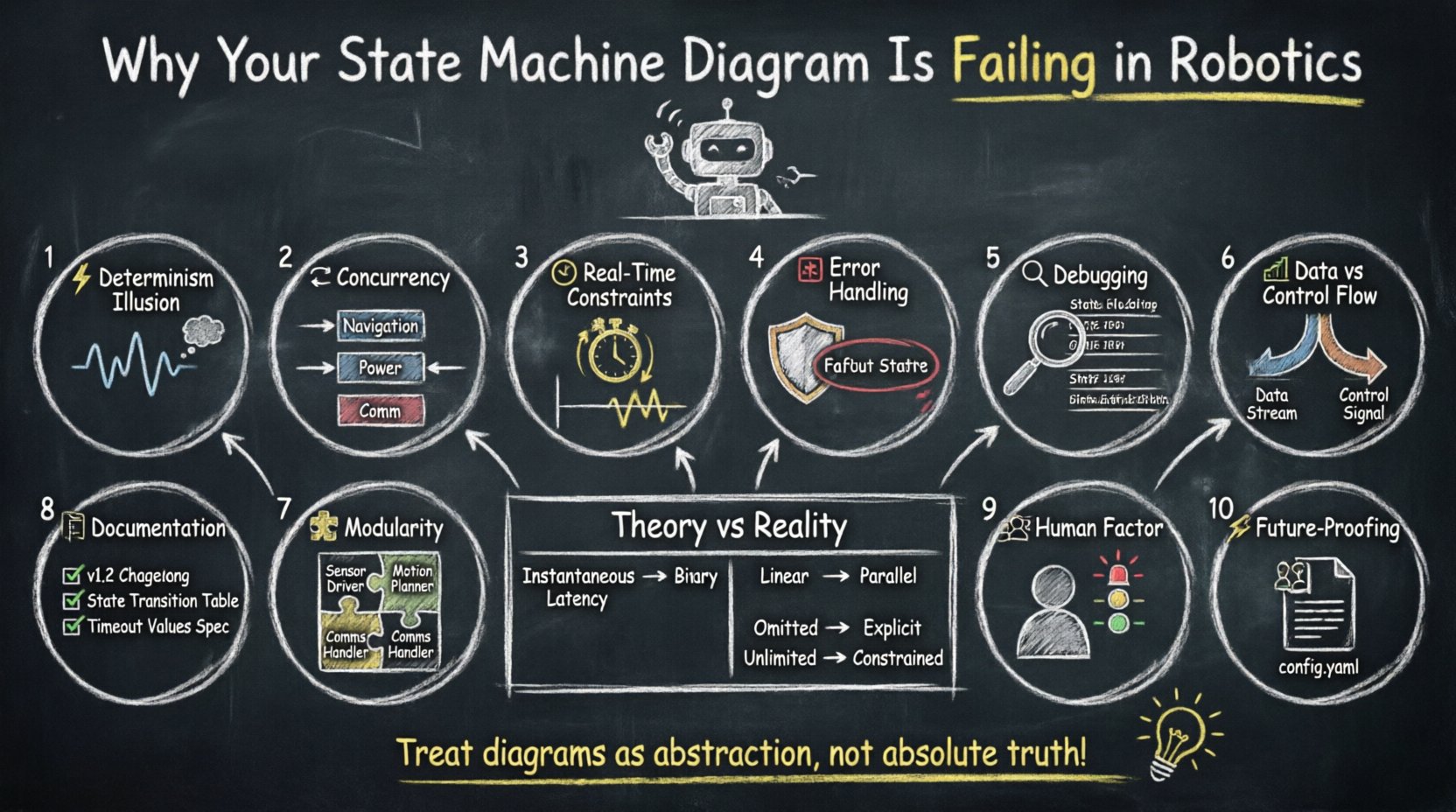
| Tính năng | Sơ đồ lý thuyết | Triển khai thực tế |
|---|---|---|
| Chuyển trạng thái | Tức thì | Bị ảnh hưởng bởi độ trễ và độ dao động |
| Đầu vào | Nhị phân (Đúng/Sai) | Dữ liệu nhiễu, tương tự hoặc thiếu vắng |
| Đồng thời | Tuyến tính hoặc lồng ghép | Các luồng và tiến trình song song |
| Lỗi | Thường bị bỏ qua | Phải rõ ràng và được ưu tiên |
| Bộ nhớ | Không giới hạn | Bị giới hạn bởi phần cứng nhúng |
5️⃣ Thách thức khi gỡ lỗi và trực quan hóa 🔍
Khi một máy trạng thái thất bại trong môi trường sản xuất, việc gỡ lỗi trở nên khó khăn. Các sơ đồ tiêu chuẩn là tài liệu tĩnh. Chúng không hiển thị lịch sử trạng thái. Chúng không hiển thị thời điểm xảy ra sự kiện. Chúng không hiển thị các giá trị dữ liệu đã kích hoạt một chuyển tiếp.
Để máy trạng thái có thể gỡ lỗi được trong robot, bạn cần:
- Ghi nhật ký trạng thái:Mọi chuyển tiếp đều phải được ghi lại cùng với thời điểm và giá trị của các biến liên quan.
- Trạng thái lịch sử: Sơ đồ phải hỗ trợ các chuyển tiếp “Lịch sử”. Nếu robot đang ở Trạng thái A, chuyển sang Trạng thái B, rồi Trạng thái B bị sập, nó phải biết quay lại Trạng thái A, chứ không phải trạng thái mặc định.
- Khả năng truy xuất nguồn gốc: Mã nguồn phải có thể truy xuất ngược lại sơ đồ. Nếu logic chuyển tiếp phức tạp, sơ đồ phải giải thích điều kiện, chứ không chỉ là mũi tên.
Không có những công cụ này, sơ đồ chỉ là một bức tranh. Nó không phải là một tài liệu quy định. Các kỹ sư sẽ quay lại viết logic trực tiếp trong mã nguồn mà không tham khảo mô hình trực quan, khiến sơ đồ trở nên lỗi thời.
6️⃣ Luồng dữ liệu so với luồng điều khiển 📊
Một sai lầm phổ biến là nhầm lẫn luồng điều khiển với luồng dữ liệu. Máy trạng thái điều khiển chế độ của robot, nhưng chúng không quản lý dữ liệu. Hệ thống cảm nhận, thuật toán lập kế hoạch và hệ thống tác động của robot đều tạo ra các luồng dữ liệu. Máy trạng thái phải phối hợp các luồng này mà không trở thành điểm nghẽn.
Nếu máy trạng thái của bạn cố gắng xử lý dữ liệu cảm biến trực tiếp, nó sẽ thất bại. Nó nên phát sinh các sự kiện khiến các quy trình khác xử lý dữ liệu. Ví dụ:
- Máy trạng thái: Chuyển từ trạng thái “Đang di chuyển” sang “Đang quét”.
- Luồng Nhận thức: Nhận sự kiện “Đang quét” và tăng tốc độ khung hình camera.
- Luồng Lên kế hoạch: Nhận sự kiện “Đang quét” và tạm dừng cập nhật quỹ đạo.
Tách biệt logic điều khiển khỏi logic xử lý dữ liệu là điều cần thiết. Sơ đồ máy trạng thái cần thể hiện rõ các giao tiếp này dưới dạng sự kiện, chứ không phải các bước xử lý dữ liệu.
7️⃣ Quản lý độ phức tạp bằng tính module 🧩
Khi robot trở nên linh hoạt hơn, máy trạng thái sẽ mở rộng. Một robot đơn giản để lấy và đặt có thể có năm trạng thái. Một robot thao tác di động có thể có năm mươi trạng thái. Một máy trạng thái năm mươi trạng thái là không thể duy trì nếu mọi trạng thái đều tương tác với nhau.
Áp dụng phương pháp module. Chia hệ thống thành các tiểu hệ thống:
- Máy trạng thái Di chuyển: Xử lý bánh xe, chân hoặc bánh xích.
- Máy trạng thái Thao tác: Xử lý tay, kẹp hoặc công cụ.
- Máy trạng thái Giao tiếp: Xử lý các thao tác bắt tay mạng và kết nối dữ liệu.
Các tiểu hệ thống này giao tiếp thông qua sự kiện. Điều này giảm tải nhận thức cho kỹ sư. Bạn có thể kiểm tra máy trạng thái Di chuyển độc lập với máy trạng thái Thao tác. Tính module này là cách duy nhất để mở rộng kiến trúc máy trạng thái cho robot phức tạp.
8️⃣ Tài liệu và Bảo trì 📝
Sơ đồ máy trạng thái là một tài liệu sống. Mã nguồn thay đổi, yêu cầu thay đổi và phần cứng thay đổi. Nếu sơ đồ không được cập nhật cùng với mã nguồn, nó sẽ trở thành thông tin sai lệch. Điều này dẫn đến vấn đề ‘sơ đồ mì ăn liền’ nơi mô hình trực quan không còn tương ứng với logic thực thi.
Các thực hành tốt nhất cho bảo trì bao gồm:
- Kiểm soát phiên bản:Xem tệp sơ đồ như mã nguồn. Gửi thay đổi với cùng mức độ nghiêm ngặt.
- Tạo mã nguồn:Nếu có thể, tạo mã nguồn từ sơ đồ hoặc sử dụng một khung công tác để giữ cho chúng đồng bộ.
- Nhật ký thay đổi: Khi một chuyển tiếp được thêm hoặc xóa, hãy ghi lại lý do. Có phải là sửa lỗi an toàn? Hay tối ưu hiệu suất?
Tài liệu không chỉ nên mô tả các trạng thái. Nó nên mô tả lý do tại sao. Tại sao chuyển tiếp này được bảo vệ? Tại sao trạng thái này được ưu tiên hơn trạng thái kia? Những quyết định này rất quan trọng đối với các kỹ sư tương lai không viết mã nguồn ban đầu.
9️⃣ Yếu tố con người trong thiết kế 👥
Cuối cùng, hãy cân nhắc người vận hành. Máy trạng thái xác định cách robot hoạt động, điều này lại xác định cách con người tương tác với nó. Nếu robot vào trạng thái “Đang bận” trong 10 phút, người vận hành có thể nghĩ rằng nó bị hỏng và cố gắng can thiệp. Nếu robot vào trạng thái “Tạm dừng” mà không có đèn trạng thái rõ ràng, người vận hành có thể cho rằng nó bị kẹt.
Máy trạng thái phải phù hợp với kỳ vọng của con người. Các chuyển tiếp phải rõ ràng, có thể nghe thấy hoặc được báo hiệu theo cách mà người vận hành hiểu được. Điều này thường bị bỏ qua trong các sơ đồ kỹ thuật, vốn tập trung hoàn toàn vào tính chính xác về mặt logic thay vì trải nghiệm người dùng. Một robot có logic đúng nhưng gây nhầm lẫn khi vận hành là một sản phẩm thất bại.
🔟 Bảo vệ kiến trúc của bạn trước tương lai 🚀
Công nghệ robotics phát triển nhanh chóng. Các cảm biến mới, bộ chấp hành mới và các mô hình AI mới liên tục được giới thiệu. Kiến trúc máy trạng thái của bạn phải linh hoạt đủ để thích nghi với những thay đổi này mà không cần viết lại hoàn toàn.
Tránh ghi cứng tên trạng thái. Sử dụng enum hoặc hằng số. Tránh ghi cứng điều kiện chuyển tiếp. Ưu tiên sử dụng tệp cấu hình hoặc tham số khi có thể. Điều này cho phép bạn điều chỉnh hành vi mà không cần biên dịch lại toàn bộ lõi logic. Đồng thời, bạn cũng có thể kiểm thử các cấu hình trạng thái khác nhau trong mô phỏng trước khi triển khai lên phần cứng.
Bằng cách tập trung vào các nguyên tắc kiến trúc này, bạn vượt qua giới hạn của sơ đồ UML tiêu chuẩn. Bạn tạo ra một hệ thống bền bỉ, dễ bảo trì và đủ mạnh mẽ cho thế giới thực.
