











組み込みシステムは信頼性が絶対的に求められる環境で動作する。単一の論理エラーがハードウェア損傷、安全上のリスク、または高コストの現場での失敗を引き起こす可能性がある。多くの組み込み制御アーキテクチャの中心には有限状態機械(FSM)がある。これらの図は、システムがさまざまな条件下でどのように振る舞うかを明確に示す。しかし、視覚的な表現の質は、その検証の質に依存する。紙面上では正しいように見える図でも、実行時にのみ明らかになる論理的な穴が隠れていることがある。
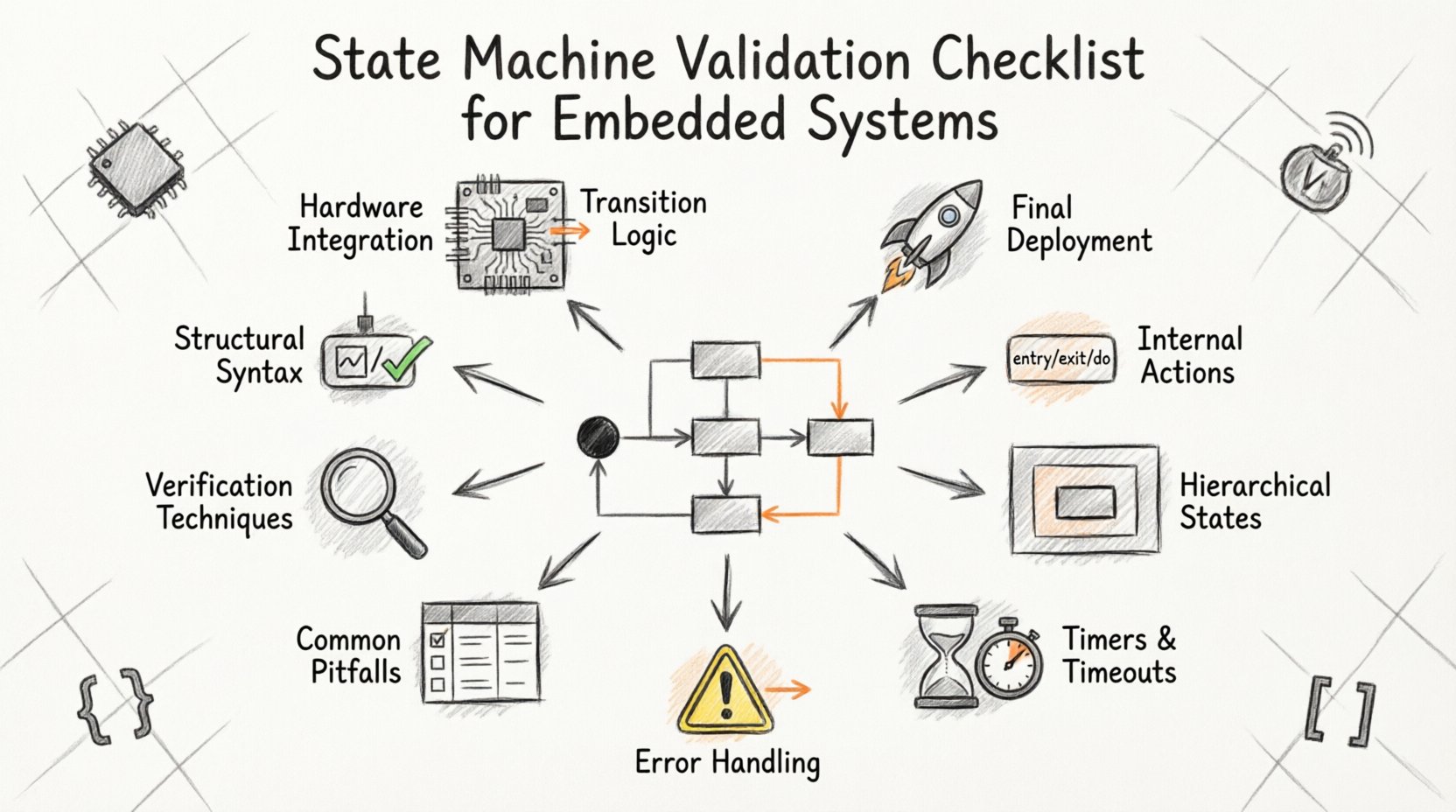
このガイドは、UML状態機械図の検証のための包括的なチェックリストを提供する。構造的正しさ、動作論理、統合ポイントに焦点を当てる。これらのステップに従うことで、設計フェーズが実行可能なコードに正確に変換されることを保証できる。特定のツールに依存せずに、構文、遷移、アクション、階層構造、エラー処理について説明する。目的は、組み込みソフトウェアの堅牢な基盤を構築することである。
1. 構造的整合性と構文 ✅
論理の分析を行う前に、図はUML状態機械構文のルールに従わなければならない。不正な構文は、実装時に混乱や曖昧さを引き起こす。すべてのノードとエッジは、標準的な規則に従って定義されなければならない。
- 初期擬似状態:機械のエントリポイントを表す黒い塗りつぶされた円がちょうど1つ存在することを確認する。システムは未定義の状態から開始してはならない。
- 最終擬似状態:終了ポイントの存在を確認する。一部の組み込みシステムは連続して動作するが、特定の操作(シャットダウンシーケンスなど)には明確な終了経路が必要である。
- 状態ノード:すべての状態には一意の識別子が必要である。同じ領域内で重複した名前を避けることで、曖昧さを防ぐ。
- 遷移:すべての矢印には明確な出発点と到着点が必要である。状態に接続されていない浮遊した遷移は無効である。
- 直交領域:並行状態を使用する場合、領域が適切に分割されていることを確認する。信号は並列な階層間で正しくルーティングされなければならない。
- ラベル:すべての遷移ラベルが Event/Guard/Action 構文に従っていることを確認する。欠落した要素は実装エラーを引き起こす可能性がある。
検証のヒント:初期ノードからすべての到達可能な状態までの図のパスを静的ウォークスルーを行う。開始点から到達できない状態がある場合、それは無効コードまたは設計上の誤りを示している。
2. 遷移論理とガード条件 🔗
遷移は、システムが一つの状態から別の状態へ移動する方法を定義する。組み込みシステムでは、これらの移動はしばしばハードウェア割り込み、センサ入力、または内部タイムアウトによって引き起こされる。これらの移動を制御する論理は正確でなければならない。
- イベント定義:遷移をトリガーするすべてのイベントが、システムアーキテクチャの他の場所で定義されていることを確認する。図中に定義されていないイベントは、インターフェースが欠落していることを意味する。
- ガード句:ガードは、遷移が発火するためには真でなければならないブール条件である。すべてのガードが、その状態でアクセス可能な変数を使用していることを確認する。
- 競合する遷移:同じ状態から出る2つの遷移が、区別するためのガードなしに同じイベントによってトリガーされないことを確認する。これにより、実行順序に曖昧さが生じる。
- デフォルト遷移:遷移にイベントがない場合(しばしばデフォルト遷移または暗黙的遷移と呼ばれる)は、論理がエントリ時に即座に移動することを要求する場合にのみ存在すべきである。このような遷移は稀であり、明示的にマークすべきである。
- 自己遷移:自己ループを慎重に検討する。内部処理には有効であるが、トリガー条件を変更するアクションがない場合、無限ループを引き起こさないことを確認する。
- 優先度: 複数の遷移が可能である場合、優先度ロジックを確認してください。明示的なガードは、暗黙のデフォルトよりも優先されるべきです。
センサーが故障する状況を検討してください。エラー状態への遷移は即座に発生するのか、それともタイムアウトを待つのか?図は望ましいタイミング動作を明示的に反映しなければなりません。
3. 状態の内部アクションと不変条件 🧠
状態は単なるプレースホルダーではありません。アクティブな動作を表しています。システムが特定の状態に存在している間に何が起こるかを理解することは、タイミング制御およびリソース管理において重要です。
- エントリアクション: これらのアクションは状態に入室する際に一度だけ実行されます。副作用を確認してください。他のシステムプロセスの遅延を引き起こす可能性のあるブロッキング操作は、エントリアクション内で行わないでください。
- エグジットアクション: これらのアクションは状態を離れる際に実行されます。状態中に取得したリソース(ファイルハンドル、メモリロック、GPIOピンなど)は、ここですべて解放されていることを確認してください。
- Doアクティビティ: これらは状態にいる間の継続的な動作を表します。Doアクティビティの実行時間があらゆるリアルタイム制約と整合していることを確認してください。
- 不変条件: 一部のモデルでは、状態にいる間常に真でなければならない条件(不変条件)を許可しています。これらの条件が、エントリ条件を前提として数学的に可能であることを検証してください。
- 変数のスコープ: 状態内で変更された変数が、並行する直交領域で予期せぬ上書きを受けることのないよう確認してください。
- 再入性: システムが再入可能である場合、Doアクティビティが実行中の間に割り込みハンドラによって状態変数が破損しないようにしてください。
4. 階層的および複合状態 📊
複雑な組み込みシステムでは、ネストされた状態が必要になることがよくあります。これによりモジュール性と再利用が可能になりますが、履歴やコンテキストの保持に関する複雑性が生じます。
- ディープヒストリ: 複合状態に履歴擬似状態がある場合、遷移ロジックを確認してください。ディープヒストリは最後にアクティブだったサブ状態を復元します。エグジットポイントのロジックが履歴タイプと一致していることを確認してください。
- シャローヒストリ: シャローヒストリは、トップレベルの最後にアクティブだったサブ状態のみを復元します。設計意図がこの動作と一致していることを確認してください。
- 継承された遷移: 親状態で定義された遷移は、すべての子状態に適用されます。意図しない子状態で誤って発動しないように、これらを確認してください。
- オーバーライドロジック: 子状態が親状態と同じイベントを持つ遷移を定義している場合、どちらが優先されるかを確認してください。通常、子状態が親状態をオーバーライドします。
- 状態の活性化: 複合状態に入室する際、初期サブ状態が正しく定義されていることを確認してください。内部コンポーネントの初期化の前にイベントを待ってはいけません。
- 終了 コンポジット状態から退出する際には、サブ状態の退出順序を確認してください。リソースは取得順の逆順で解放しなければなりません。
検証には階層をたどる必要があります。深い子状態からの遷移が、必要に応じてすべての親レベルを正しく退出するか確認してください。
5. タイマー、ウォッチドッグ、タイムアウト ⏱️
組み込みシステムは時間に敏感です。状態機械は、イベントではなく期間に依存する遷移を管理するために、しばしばタイマーに依存します。
- タイマーの初期化: タイマーが、タイムアウトが必要な状態のエントリアクションで開始されていることを確認してください。
- タイマーのキャンセル: タイムアウトが発生する前に状態を離れる場合、タイマーはエグジットアクションでキャンセルされていることを確認してください。これにより、後で誤動作イベントが発生するのを防ぎます。
- タイムアウトイベント: タイマーによって生成されるイベントは一意でなければなりません。ハードウェア割り込みとソフトウェアタイムアウトの両方に同じイベント名を使用しないでください。ただし、論理的にそれらを別々に処理する場合を除きます。
- ウォッチドッグとの連携: 状態機械がハードウェアウォッチドッグに信号を供給している場合、リセットを防ぐために十分な頻度で遷移が発生していることを確認してください。
- コンポジット状態におけるタイムアウト: 親状態でタイマーが有効な場合、子状態に移行したときにそのタイマーがどのように動作するか確認してください。タイマーは一時停止するか、継続するか、リセットされるかを確認します。
6. エラー処理と回復経路 🚨
現実世界の環境はノイズが多いです。センサーは故障し、信号が失われ、ハードウェアの不具合が発生します。信頼性の高い状態機械は、これらの障害を考慮しなければなりません。
- デフォルトのエラー状態: すべてのマシンには定義されたエラー状態が必要です。未知のイベントを受け取った場合、システムはどこへ移行するかを確認してください。
- 回復ロジック: エラー状態から安全な運用状態へ戻る経路を定義してください。手動介入が必要か、自動リトライが必要かを確認します。
- エラー時のタイムアウト: 遷移が失敗した場合、システムはすぐに再試行しますか?もしそうなら、無限ループを防ぐためにカウンタを追加してください。
- リソースのクリーンアップ: エラー状態では、すべての割り当てられたリソースが戻されていることを確認してください。ピンを浮遊状態にしたり、メモリをロックしたままにしてはいけません。
- ログ記録ポイント: エラーコードを記録すべき遷移ポイントを特定してください。これは現場の問題をデバッグする上で非常に重要です。
- 安全状態: ハードウェアにとって「安全」とは何を意味するかを定義してください。電源はオフですか?位置を保持していますか?図面はこの物理的な現実を反映している必要があります。
7. 一般的な落とし穴と検証基準表 📋
以下の表は、状態機械の検証中に見つかる一般的な問題と、それらを解決するための基準を要約しています。
| カテゴリ | 潜在的な問題 | 検証基準 |
|---|---|---|
| 論理 | 到達不可能な状態 | グラフ走査により、初期ノードからすべての状態に到達可能であることが確認される。 |
| 論理 | デッドロック | どの状態にも出力遷移が存在せず、内部ループがないことを確認する。 |
| イベント | イベント名の衝突 | すべてのマシンスコープにわたってイベント名が一意であることを確認する。 |
| アクション | ブロッキング操作 | エントリ/エグジットアクションは、スケジューラに制御を素早く戻す必要がある。 |
| タイミング | リセットの欠落 | すべてのタイマーおよびカウンターが状態進入時にリセットされていることを確認する。 |
| 統合 | インターフェースの不一致 | 図上のイベント名は、コード内の関数シグネチャと一致しなければならない。 |
| 履歴 | 履歴の喪失 | ディープヒストリの擬似状態が、サブ状態のコンテキストを正しく復元していることを確認する。 |
| リソース | リソースリーク | エントリでのすべての割り当てには、エグジットでの対応する解放が必要である。 |
8. 検証技術とドキュメント 🔍
検証は図の作成で終わるものではない。要件に対してモデルがテストされる検証フェーズまで継続する。
- モデル検査: 特定の制約下で、特定の状態(エラー状態など)が到達可能または到達不可能であることを、形式的手法を用いて証明する。
- シミュレーション: 配置の前に、図をシミュレーション環境で実行する。合成イベントを入力して、出力シーケンスの正当性を検証する。
- コード生成: モデルからコードを生成する場合、生成されたコードが論理と一致していることを確認する。欠落したガードや無視されたアクションがないか確認する。
- 追跡可能性マトリクス: 各状態および遷移を特定の要件IDに関連付ける。これにより、正当な根拠なしに何の構築も行われないことを保証する。
- 同僚レビュー: 同僚に図をレビューしてもらう。新しい目で見ることで、著者が見逃した論理フローを発見することが多い。
- バージョン管理: 図をコードとして扱う。論理の変更を時間とともに追跡できるように、バージョン履歴を維持する。
9. ハードウェアおよびミドルウェアとの統合 📡
状態機械は真空の中で存在するものではない。ドライバーや割り込み、通信スタックと相互作用する。
- 割り込み遅延: 入ってくる割り込みの遅延を状態機械が処理でき、イベントを漏らさないことを確認する。
- コンテキストスイッチング: 状態機械がRTOS上で動作する場合、コンテキストスイッチの間でも状態が正しく保持されることを検証する。
- 通信プロトコル: 状態機械がプロトコル(UARTやCANなど)を管理する場合、状態内のバッファ処理ロジックを検証する。
- 電源管理: システムがスリープする場合、ウェイクアップ時に状態機械のコンテキストが正確に保存および復元されることを確認する。
- シグナルのノイズ除去(デバウンス): ハードウェア入力をイベントとして使用する場合、図は状態またはドライバーのいずれかでノイズ除去ロジックを考慮すべきである。
10. 配置前の最終検証ステップ 🚀
実装用に設計をリリースする前に、最終的な監査を実施する。
- ガードで使用されるすべての変数が、最初の状態に到達する前に初期化されていることを確認する。
- 最も深いネストされた状態遷移中に、最大スタック使用量が制限を超えないことを確認する。
- エラー状態が、後続分析のために非揮発性メモリに記録されていることを検証する。
- 設計フェーズ中に加えられた変更を反映するように、図のドキュメントを更新することを確認する。
- モデル定義の構文エラーをチェックするために、利用可能な静的解析ツールを実行する。
状態機械図の検証は、理論的厳密性と実践的工学を融合する分野です。すべてのノードとエッジで細部への注意を要します。このチェックリストに従うことで、論理的なバグのリスクを低減し、組み込みシステムの保守性を向上させます。適切に検証された図は、一貫した真実の源となり、実装とテストを明確に導きます。このアプローチにより、最終製品が現場で信頼性高く動作し、安全と性能の要件を満たすとともに、継続的なパッチやリコールを必要としなくなります。
モデルの明確さ、遷移の正確さ、エラー経路の堅牢性に注目してください。これらの要素が信頼性の高い組み込みアーキテクチャの基盤を形成します。図が適切であれば、コードは自然に導かれ、システムは意図した通りに動作します。
