











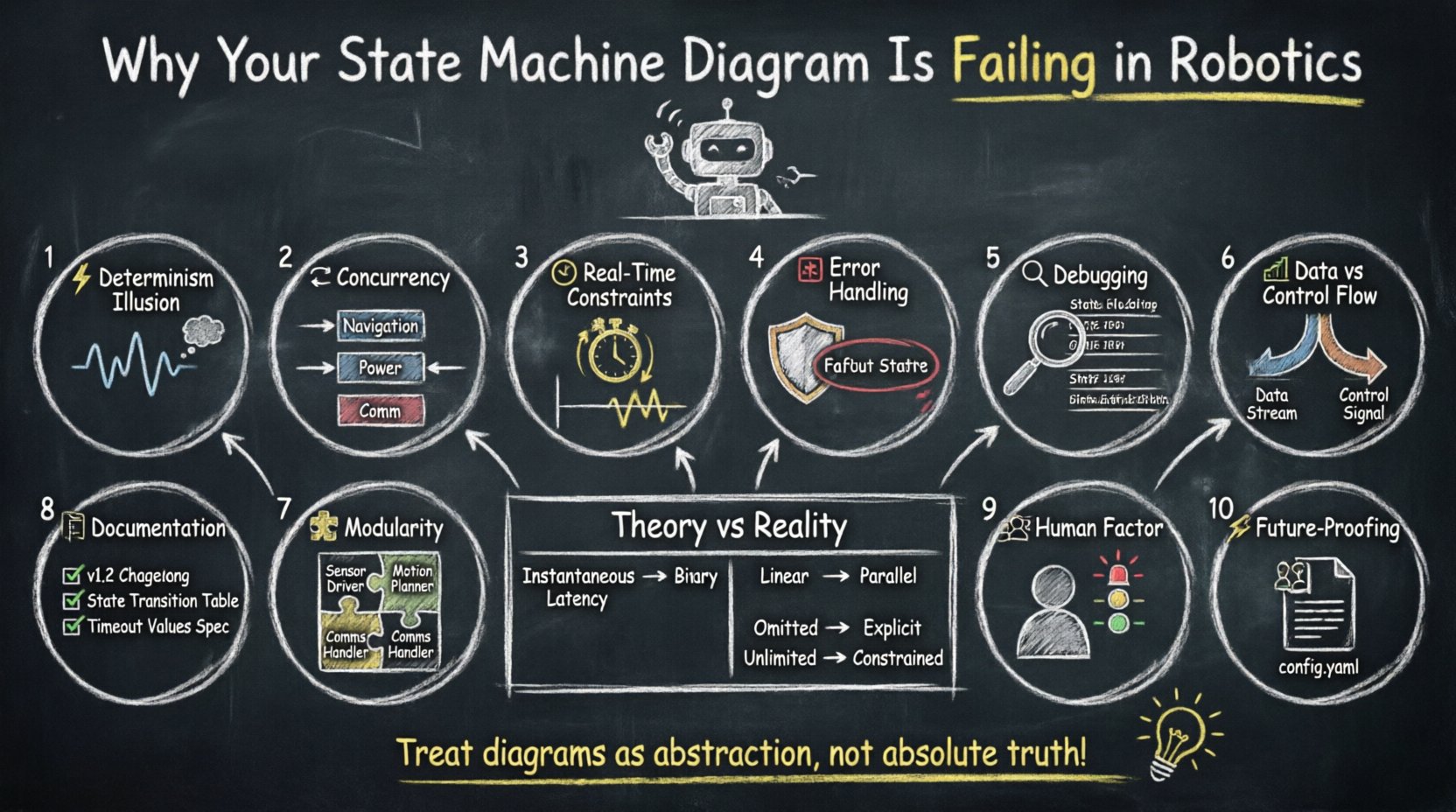
Engenheiros de robótica frequentemente começam a arquitetura de sistemas autônomos com uma sensação de confiança. Uma Máquina de Estados Finitos (FSM) ou um diagrama de máquina de estados UML parece ser o plano perfeito para a lógica de controle. É limpo, visual e determinístico em teoria. No entanto, quando esses diagramas são traduzidos em código real em hardware físico, os resultados são frequentemente decepcionantes. Os sistemas travam, transições inesperadas ocorrem e o depuração torna-se uma pesadilha. A discrepância não reside na própria filosofia de design, mas nas suposições feitas sobre o ambiente e a plataforma de execução. Este guia explora as razões técnicas específicas pelas quais diagramas padrão de máquinas de estados enfrentam dificuldades em robótica do mundo real e como ajustar sua abordagem para uma implantação robusta.
1️⃣ A Ilusão de Determinismo em Sistemas Físicos
Na ciência da computação teórica, uma máquina de estados opera em vácuo. As transições são instantâneas e as entradas são perfeitamente sincronizadas. Na robótica, no entanto, o mundo físico introduz latência, ruído e variação. Um diagrama de máquina de estados geralmente assume que, se o robô estiver em Estado A e Evento X ocorrer, ele passa para Estado B. Essa lógica é válida em simulação, mas o hardware introduz variáveis que os diagramas raramente capturam.
- Latência de Sinal: Sensores não relatam dados instantaneamente. Um sensor de distância pode relatar um obstáculo 20 milissegundos após o robô colidir com ele. A máquina de estados vê o evento tarde, potencialmente causando uma colisão antes que a lógica de transição seja executada.
- Ordem dos Eventos: Em um ambiente multi-threaded, dois eventos podem ser disparados simultaneamente. O diagrama de máquina de estados geralmente os mostra sequencialmente, mas o processador pode tratá-los em uma ordem diferente, levando a estados indesejados.
- Degradabilidade do Hardware: Um motor pode consumir mais corrente do que o esperado, acionando inesperadamente um estado de gerenciamento de energia. O diagrama assume condições operacionais nominais.
Para mitigar isso, você deve tratar a máquina de estados não como a verdade absoluta, mas como uma abstração de alto nível. A camada de implementação deve incluir bufferização, amortecimento e verificações de tempo que o diagrama visual não mostra explicitamente.
2️⃣ Concorrência e Estados Paralelos 🔄
Uma das limitações mais significativas dos diagramas básicos de máquinas de estados é sua natureza linear. As aplicações de robótica são intrinsecamente concorrentes. Um robô deve navegar enquanto escuta comandos de parada de emergência, monitora o nível da bateria e comunica-se com uma estação-base simultaneamente. Máquinas de estados sequenciais tradicionais obrigam você a criar estados aninhados complexos ou uma explosão combinatória de estados para representar comportamentos paralelos.
O Problema Hierárquico
Quando você tenta modelar atividades paralelas usando a hierarquia padrão do UML, o diagrama torna-se ilegível. Você acaba com um ‘gráfico de espaguete’ em que cada combinação de status de navegação e nível da bateria exige um estado único. Essa abordagem é frágil. Se você adicionar um novo sensor ou um novo protocolo de segurança, precisará reescrever dezenas de estados.
A Solução: Regiões Ortogonais
Implementações avançadas de máquinas de estados suportam regiões ortogonais. Isso permite que o sistema execute múltiplas máquinas de estados independentes em paralelo. Por exemplo:
- Região 1: Navegação (Movendo, Parado, Evitando Obstáculos)
- Região 2: Gerenciamento de Energia (Carregando, Bateria Baixa, Normal)
- Região 3: Comunicação (Conectado, Desconectado, Sincronizando)
Sem essa capacidade, seu diagrama está falhando porque não consegue representar a arquitetura verdadeira do sistema. O modelo visual deve corresponder ao modelo lógico de execução. Se a implementação usa uma única thread de controle, o diagrama é uma mentira.
3️⃣ Tempo e Restrições em Tempo Real ⏱️
Máquinas de Estados UML não codificam nativamente restrições de tempo. Elas descrevem o queacontece, não quandoacontece. Na robótica, o tempo é frequentemente mais crítico do que a lógica. Uma máquina de estados de navegação pode mudar para “Parada de Emergência” se um obstáculo for detectado. Se a lógica de detecção levar 100 milissegundos, o robô já terá se movido significativamente.
Considere os seguintes cenários em que o tempo compromete o diagrama:
- Tempo limite: Uma máquina de estados pode esperar indefinidamente por um sinal. No mundo real, esperar indefinidamente é uma falha do sistema. Os cronômetros devem ser explícitos.
- Taxas de varredura: Sensores varrem em intervalos específicos. Uma transição de estado pode ser acionada entre ciclos de varredura, fazendo com que a lógica perca o evento completamente.
- Jitter: O agendamento do sistema operacional pode causar atrasos. Uma máquina de estados projetada para precisão de 1ms falhará se o sistema operacional subjacente introduzir um jitter de 50ms.
Diagramas eficazes para robótica devem anotar estados com requisitos de tempo. Se um estado exigir uma janela de resposta de 50ms, o diagrama deve refletir essa restrição, mesmo que a implementação de software a trate separadamente.
4️⃣ Tratamento de Erros e Tolerância a Falhas 🛑
A maioria dos diagramas de máquinas de estados foca no caminho feliz. Eles mostram como o robô se move de Início a Meta. Raramente mostram o que acontece quando o motor do braço queima, o Wi-Fi cai ou a tensão da bateria cai abaixo dos níveis seguros. No software, erros são exceções. Na robótica, erros são o estado padrão do universo.
Estados de Erro Ausentes
Se o seu diagrama não modelar explicitamente modos de falha, o seu sistema é frágil. Você precisa de estados para:
- Falha do Sensor: E se o lidar parar de retornar dados?
- Travamento do Atuador: E se uma roda estiver fisicamente travada?
- Tempo Limite da Lógica: E se o robô ficar preso em um loop?
A Rede de Segurança
Sistemas robustos implementam um estado global de erro que pode ser acessado a partir de qualquer estado. Isso é frequentemente chamado de estado “Watchdog” ou “Modo Seguro”. Se qualquer ramificação de lógica travar ou produzir dados inválidos, o sistema deve forçar uma transição para esse estado seguro. Um diagrama padrão geralmente esconde isso por trás de detalhes de implementação, tornando-o invisível para partes interessadas e mantenedores futuros.
| Funcionalidade | Diagrama Teórico | Implementação no Mundo Real |
|---|---|---|
| Transições | Instantâneo | Sujeito a latência e jitter |
| Entradas | Binário (Verdadeiro/Falso) | Dados ruidosos, analógicos ou ausentes |
| Concorrência | Linear ou Aninhado | Threads e processos paralelos |
| Erros | Freqüentemente omitido | Deve ser explícito e priorizado |
| Memória | Ilimitado | Limitado pelo hardware embarcado |
5️⃣ Desafios de Depuração e Visualização 🔍
Quando uma máquina de estados falha em produção, a depuração é difícil. Diagramas padrão são documentos estáticos. Eles não mostram o histórico de estados. Eles não mostram o tempo dos eventos. Eles não mostram os valores de dados que acionaram uma transição.
Para tornar as máquinas de estados depuráveis na robótica, você precisa:
- Registro de Estados:Cada transição deve ser registrada com um horário e os valores das variáveis relevantes.
- Estados de Histórico:O diagrama deve suportar transições de “Histórico”. Se o robô estava no Estado A, foi para o Estado B e depois o Estado B travou, ele deveria saber retornar ao Estado A, e não para um estado padrão.
- Rastreabilidade:O código deve ser rastreável de volta ao diagrama. Se a lógica de transição for complexa, o diagrama deve explicar a condição, e não apenas a seta.
Sem essas ferramentas, o diagrama é meramente uma imagem. Ele não é uma especificação. Engenheiros voltarão a escrever a lógica diretamente no código, sem se referir ao modelo visual, tornando o diagrama obsoleto.
6️⃣ Fluxo de Dados vs. Fluxo de Controle 📊
Um erro comum é confundir fluxo de controle com fluxo de dados. As máquinas de estados controlam o modo do robô, mas elas não gerenciam o dados. O sistema de percepção do robô, o algoritmo de planejamento e o sistema de atuação todos geram fluxos de dados. A máquina de estados deve coordenar esses fluxos sem se tornar um gargalo.
Se sua máquina de estados tentar processar dados de sensores diretamente, ela falhará. Ela deveria disparar eventos que causem outros processos a lidarem com os dados. Por exemplo:
- Máquina de Estados: Transições de “Movendo” para “Varrendo”.
- Fio de Percepção: Recebe o evento “Varrendo” e aumenta a taxa de quadros da câmera.
- Fio de Planejamento: Recebe o evento “Varrendo” e pausa as atualizações de trajetória.
Desacoplar a lógica de controle da lógica de processamento de dados é essencial. O diagrama da máquina de estados deve mostrar claramente essas transições como eventos, e não como etapas de processamento de dados.
7️⃣ Gerenciando a Complexidade com Modularidade 🧩
À medida que o robô se torna mais capaz, a máquina de estados cresce. Um robô simples de pegar e colocar pode ter cinco estados. Um manipulador móvel pode ter cinquenta. Uma máquina de estados com cinquenta estados é impossível de manter se cada estado interagir com todos os outros estados.
Adote uma abordagem modular. Divida o sistema em subsistemas:
- Máquina de Estados de Locomoção: Gerencia rodas, pernas ou trilhas.
- Máquina de Estados de Manipulação: Gerencia braços, pinças ou ferramentas.
- Máquina de Estados de Comunicação: Gerencia apertos de mão de rede e links de dados.
Esses subsistemas se comunicam por meio de eventos. Isso reduz a carga cognitiva sobre o engenheiro. Você pode verificar a Máquina de Estados de Locomoção independentemente da Máquina de Estados de Manipulação. Essa modularidade é a única maneira de escalar arquiteturas de máquinas de estados para robótica complexa.
8️⃣ Documentação e Manutenção 📝
Um diagrama de máquina de estados é um documento vivo. Mudanças no código, mudanças nos requisitos e mudanças no hardware ocorrem. Se o diagrama não for atualizado junto com o código, ele se torna informação incorreta. Isso leva ao problema do “diagrama espaguete”, em que o modelo visual não tem nenhuma semelhança com a lógica executável.
Melhores práticas para manutenção incluem:
- Controle de Versão: Trate o arquivo do diagrama como código. Faça commits das mudanças com a mesma rigorosidade.
- Geração de Código: Quando possível, gere código a partir do diagrama ou use uma estrutura que os mantenha sincronizados.
- Logs de Mudanças: Quando uma transição é adicionada ou removida, documente o motivo. Foi uma correção de segurança? Uma otimização de desempenho?
A documentação não deve apenas descrever os estados. Ela deve descrever o porquê. Por que esta transição é protegida? Por que este estado tem prioridade sobre aquele? Essas decisões são críticas para engenheiros futuros que não escreveram o código original.
9️⃣ O Fator Humano no Design 👥
Por fim, considere o operador humano. A máquina de estados determina como o robô se comporta, o que determina como os humanos interagem com ele. Se o robô entrar em um estado de “Ocupado” por 10 minutos, o operador pode achar que ele está com defeito e tentar intervir. Se o robô entrar em “Pausado” sem uma luz de status clara, o operador pode achar que está travado.
A máquina de estados deve estar alinhada com as expectativas humanas. As transições devem ser visíveis, audíveis ou sinalizadas de forma que o operador humano compreenda. Isso muitas vezes é negligenciado em diagramas técnicos, que se concentram puramente na correção lógica em vez da experiência do usuário. Um robô que é logicamente correto, mas confuso de operar, é um produto falhado.
🔟 Futurizando a sua Arquitetura 🚀
A tecnologia de robótica evolui rapidamente. Sensores novos, atuadores novos e novos modelos de IA são introduzidos constantemente. A sua arquitetura de máquina de estados deve ser flexível o suficiente para acomodar essas mudanças sem uma reescrita completa.
Evite codificar nomes de estados diretamente. Use enums ou constantes. Evite codificar condições de transição diretamente. Use arquivos de configuração ou parâmetros sempre que possível. Isso permite ajustar o comportamento sem recompilar todo o núcleo lógico. Também permite testar diferentes configurações de estados em simulação antes de implantar no hardware.
Ao focar nesses princípios arquitetônicos, você vai além das limitações do diagrama UML padrão. Você cria um sistema resiliente, manutenível e robusto o suficiente para o mundo físico.
