











Trong lĩnh vực hệ thống nhúng và robot tự hành, quản lý hành vi phức tạp đòi hỏi hơn là các câu lệnh điều kiện đơn giản. Một sơ đồ Máy trạng thái được định nghĩa rõ ràng cung cấp cách tiếp cận có cấu trúc để mô hình hóa hành vi động của một hệ thống. Hướng dẫn này trình bày một nghiên cứu trường hợp toàn diện tập trung vào việc thiết kế logic điều khiển cho một drone tự hành bằng các nguyên tắc sơ đồ Máy trạng thái UML. Chúng ta sẽ khám phá cách xác định các trạng thái, quản lý các chuyển tiếp, xử lý các sự kiện và đảm bảo hoạt động ổn định dưới các điều kiện thực tế.
Hiểu về sơ đồ Máy trạng thái trong UML 📐
Sơ đồ Máy trạng thái, thường được gọi là Sơ đồ biểu đồ trạng thái trong UML 2.0, biểu diễn các trạng thái rời rạc của một đối tượng hoặc hệ thống và các chuyển tiếp giữa các trạng thái đó. Khác với sơ đồ lớp tĩnh, mô hình này ghi lại hành vi theo thời gian của hệ thống. Nó đặc biệt hữu ích cho các hệ thống phản ứng, nơi đầu ra phụ thuộc vào trạng thái hiện tại và các sự kiện đầu vào.
Các thành phần chính bao gồm:
- Trạng thái: Một điều kiện hoặc tình huống trong quá trình sống của một đối tượng, trong đó nó thỏa mãn một điều kiện nhất định, thực hiện một hoạt động nào đó hoặc chờ đợi một sự kiện nào đó.
- Chuyển tiếp: Một mối quan hệ giữa hai trạng thái cho thấy các đối tượng ở trạng thái đầu tiên sẽ chuyển sang trạng thái thứ hai khi một sự kiện cụ thể xảy ra và các điều kiện nhất định được thỏa mãn.
- Sự kiện: Một sự kiện quan trọng, chẳng hạn như việc nhận tín hiệu, thời gian trôi qua hoặc một ngoại lệ, làm kích hoạt một chuyển tiếp.
- Điều kiện bảo vệ: Một biểu thức logic phải đúng để chuyển tiếp xảy ra.
- Hành động: Một phép tính hoặc hoạt động được thực hiện khi nhập vào, rời khỏi hoặc trong quá trình chuyển tiếp.
Sử dụng ký hiệu này giúp các kỹ sư hình dung luồng điều khiển mà không bị lạc trong cú pháp mã nguồn. Nó đóng vai trò như bản vẽ thiết kế cho việc triển khai, đảm bảo rằng mọi hành vi hệ thống khả dĩ đều được tính đến trước khi viết bất kỳ dòng mã thực thi nào.
Nghiên cứu trường hợp: Drone giao hàng tự hành 🚁
Xét một drone quadcopter được thiết kế cho việc giao hàng cuối cùng trong môi trường đô thị. Hệ thống này phải hoạt động tự động nhưng cần sự giám sát của con người đối với các sự kiện quan trọng cụ thể. Drone được trang bị GPS, hệ thống quản lý pin, cảm biến tránh vật cản và một module truyền thông. Logic điều khiển phải xử lý các thao tác bình thường, định vị, và nhiều chế độ lỗi khác nhau.
Thách thức thiết kế bao gồm đảm bảo drone không cố gắng cất cánh khi pin yếu, không mất kết nối mà không quay về nhà, và hạ cánh an toàn trong tình huống khẩn cấp. Một đoạn mã tuyến tính sẽ khó bảo trì và dễ xảy ra các điều kiện đua. Một Máy trạng thái cung cấp một cấu trúc rõ ràng cho các thao tác.
Xác định các trạng thái cốt lõi ⚙️
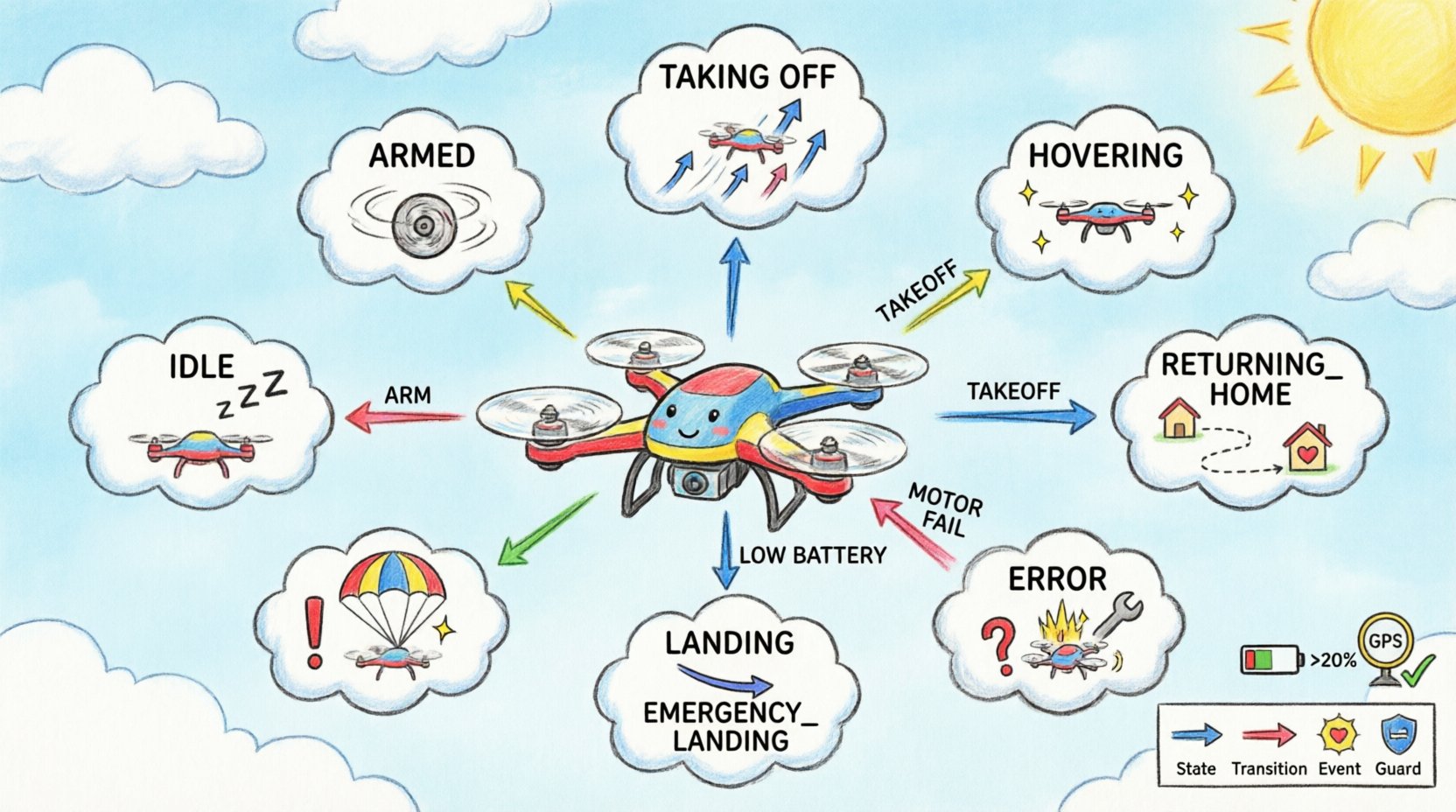
Bước đầu tiên trong quá trình thiết kế là xác định các chế độ hoạt động riêng biệt. Đối với drone này, chúng ta xác định các trạng thái chính sau đây. Mỗi trạng thái đại diện cho một giai đoạn cụ thể trong sứ mệnh.
- DỪNG CHẠM: Drone được bật nguồn nhưng chưa được kích hoạt. Nó chờ lệnh để bắt đầu sứ mệnh.
- KÍCH HOẠT: Các động cơ đang quay, drone đã sẵn sàng cất cánh. Nó chưa bay lên không trung.
- CẤT CÁNH: Drone đang leo lên từ mặt đất đến độ cao ổn định khi lơ lửng.
- LƠ LỬNG: Drone đứng yên trên không, duy trì vị trí.
- ĐIỀU HƯỚNG: Máy bay không người lái đang di chuyển chủ động giữa các điểm định vị để giao hàng.
- ĐANG TRỞ VỀ NHAU: Máy bay không người lái đang bay trở lại vị trí phóng do pin yếu hoặc mất tín hiệu.
- ĐANG HẠ CÁNH: Máy bay không người lái đang hạ cánh từ trên không xuống mặt đất.
- HẠ CÁNH KHẨN CẤP: Việc hạ cánh ngay lập tức và bắt buộc do sự cố nghiêm trọng (ví dụ: hỏng động cơ).
- LỖI: Trạng thái tổng quát cho các lỗi không được xử lý hoặc khởi động lại hệ thống.
Lưu ý rằng các trạng thái như DỪNG CHẠM và LỖI là trạng thái kết thúc hoặc gần kết thúc. Một khi hệ thống bước vào LỖI, nó không thể tiếp tục đến ĐIỀU KHIỂN ĐIỀU HƯỚNG mà không có thao tác reset thủ công. Điều này ngăn máy bay không người lái cố gắng bay khi đang ở trạng thái lỗi.
Logic chuyển trạng thái và bộ kích hoạt sự kiện 📡
Các chuyển trạng thái xác định cách hệ thống di chuyển giữa các trạng thái được liệt kê ở trên. Những chuyển động này được kích hoạt bởi các sự kiện như đầu vào người dùng, dữ liệu cảm biến hoặc bộ đếm thời gian nội bộ. Bảng dưới đây nêu rõ các chuyển trạng thái quan trọng cần thiết cho logic điều khiển.
| Sự kiện | Trạng thái nguồn | Trạng thái đích | Điều kiện bảo vệ |
|---|---|---|---|
| LỆNH KÍNH CHỦ | DỪNG CHẠM | CHUẨN BỊ | Pin > 20% |
| HOÀN TẤT CẤT CÁNH | CHUẨN BỊ | CẤT CÁNH | Cảm biến độ cao đang hoạt động |
| ĐẠT VỊ TRÍ LƯNG LÙNG | CẤT CÁNH | LƯNG LÙNG | Độ cao = 1,5m |
| BẮT ĐẦU NHIỆM VỤ | LƯNG LÙNG | ĐIỀU KHIỂN ĐIỀU HƯỚNG | GPS đã khóa = Đúng |
| PIN YẾU | ĐIỀU KHIỂN ĐIỀU HƯỚNG | TRỞ VỀ NHÀ | Pin < 30% |
| MẤT TÍN HIỆU | ĐIỀU KHIỂN ĐIỀU HƯỚNG | TRỞ VỀ NHÀ | Thời gian > 5s mà không có tín hiệu |
| ĐẾN NHÀ | TRỞ VỀ NHÀ | HẠ CÁNH | Khoảng cách = 0m |
| CHẠM ĐẤT | HẠ CÁNH | ĐANG DỪNG | Độ cao = 0m |
| LỖI ĐỘNG CƠ | Bất kỳ | HẠ CÁNH KHẨN CẤP | Dòng điện < 0A |
Quan sát rằng SỰ CỐ ĐỘNG CƠ sự kiện có trạng thái nguồn là Bất kỳ. Đây được gọi là chuyển tiếp vuông góc hoặc ngắt quãng. Dù cho máy bay không người lái đang ở trạng thái DỪNG LẠI hay ĐIỀU HƯỚNG, một sự cố động cơ nghiêm trọng buộc phải thay đổi trạng thái ngay lập tức sang HẠ CÁNH KHẨN CẤP. Điều này đảm bảo an toàn được ưu tiên hơn so với việc duy trì nhiệm vụ.
Điều kiện bảo vệ và Hành động 🛑
Các chuyển tiếp không phải lúc nào cũng không điều kiện. Các điều kiện bảo vệ hoạt động như các kiểm tra an toàn. Ví dụ, người dùng không thể khởi động chuỗi cất cánh nếu pin ở mức thấp nghiêm trọng. Điều kiện bảo vệ Pin > 20% ngăn cản chuyển tiếp từ DỪNG LẠI sang CHUẨN BỊ.
Hơn nữa, các chuyển tiếp thường kích hoạt các hành động. Những hành động này được thực thi khi chuyển tiếp xảy ra hoặc trong một trạng thái cụ thể.
- Hành động vào trạng thái: Mã được thực thi ngay lập tức khi vào một trạng thái. Đối với trạng thái CẤT CÁNH trạng thái, một hành động vào trạng thái có thể là đặt lực đẩy động cơ ở mức 60% và khởi tạo bộ điều khiển PID độ cao.
- Hành động rời trạng thái: Mã được thực thi ngay lập tức khi rời khỏi một trạng thái. Khi rời khỏi LƯU LỘNG, hệ thống có thể dừng bộ theo dõi điểm đến để tránh các lệnh mâu thuẫn.
- Thực hiện Hoạt động: Mã được thực thi liên tục trong khi ở trong một trạng thái. Trong trạng thái ĐIỀU KHIỂN ĐIỂM ĐẾN trạng thái, một Thực hiệnhoạt động này bao gồm việc liên tục đọc dữ liệu GPS và điều chỉnh tốc độ động cơ để duy trì quỹ đạo bay.
Xem xét trạng thái TRỞ VỀ NHÀtrạng thái. Khi vào trạng thái, drone phải tính toán vectơ quay về điểm xuất phát. Khi rời khỏi trạng thái, nó phải xóa vectơ quay về. Điều này đảm bảo rằng nếu drone chuyển lại sang ĐIỀU KHIỂN ĐIỂM ĐẾN (có thể do người dùng lấy lại quyền kiểm soát), logic quay về sẽ không can thiệp vào logic nhiệm vụ.
Thiết kế trạng thái phân cấp (Trạng thái hợp thành) 🏗️
Các máy trạng thái phẳng có thể trở nên khó kiểm soát khi độ phức tạp tăng lên. Các máy trạng thái phân cấp cho phép các trạng thái chứa các trạng thái con. Điều này đặc biệt hữu ích cho trạng thái ĐIỀU KHIỂN ĐIỂM ĐẾNtrạng thái. Điều hướng không phải là một hành động duy nhất; mà là tập hợp các hành vi.
Chúng ta có thể định nghĩa ĐIỀU KHIỂN ĐIỂM ĐẾNlà một trạng thái hợp thành với các trạng thái con nội bộ sau:
- THEO DÕI ĐIỂM ĐẾN:Chế độ chuẩn nơi drone di chuyển giữa các điểm.
- TRÁNH VA CHẠM:Trạng thái được vào khi phát hiện vật cản.
- ỔN ĐỊNH:Trạng thái cấp thấp quản lý cân bằng động cơ trong các cơn gió mạnh.
Các chuyển tiếp giữa các trạng thái con này xảy ra mà không rời khỏi trạng thái cha ĐIỀU KHIỂN ĐIỂM ĐẾNtrạng thái. Ví dụ, nếu phát hiện vật cản, hệ thống chuyển từ THEO DÕI ĐIỂM ĐẾNsang TRÁNH VA CHẠM. Trạng thái cha vẫn hoạt động, duy trì bối cảnh nhiệm vụ tổng thể. Khi vật cản được loại bỏ, hệ thống quay lại THEO DÕI ĐIỂM ĐẾN.
Cấu trúc này giảm thiểu sự trùng lặp. Các hành động chung cho điều hướng, chẳng hạn như cập nhật nhật ký truyền dữ liệu, có thể được định nghĩa ở cấp độ cha thay vì lặp lại chúng trong mỗi trạng thái con. Nó cũng cải thiện độ rõ ràng bằng cách nhóm các hành vi liên quan lại với nhau về mặt trực quan.
Các cân nhắc khi triển khai cho hệ thống nhúng 💻
Chuyển đổi sơ đồ máy trạng thái thành mã thực thi đòi hỏi sự chú ý đến các giới hạn của phần cứng nhúng. Bộ điều khiển bay của drone thường chạy trên một vi điều khiển với bộ nhớ RAM và chu kỳ CPU bị giới hạn.
- Hiệu quả bộ nhớ:Tránh lưu trữ toàn bộ lịch sử trạng thái. Chỉ theo dõi trạng thái hiện tại. Sử dụng kiểu liệt kê hoặc số nguyên để biểu diễn trạng thái sẽ tối thiểu hóa việc sử dụng bộ nhớ.
- Khả năng phản hồi thời gian thực: Các chuyển đổi phải xảy ra một cách xác định. Nếu THỨC TẢI KHẨN CẤP sự kiện được kích hoạt, mã nguồn không được chờ đợi một tác vụ dài chạy hoàn tất. Các ngắt phải được xử lý bên ngoài vòng lặp trạng thái chính hoặc với mức ưu tiên cao.
- Tính nhất quán trạng thái: Đảm bảo rằng không có trạng thái nào có hành vi không xác định. Mọi sự kiện có thể xảy ra đều phải có chuyển đổi được xác định. Nếu xảy ra sự kiện không mong đợi, hệ thống phải chuyển sang trạng thái LỖI thay vì bị sập hoặc treo.
- Ghi nhật ký: Triển khai cơ chế ghi nhật ký trạng thái. Khi xảy ra chuyển đổi, ghi thời điểm, trạng thái nguồn, trạng thái đích và sự kiện vào bộ nhớ không bay hơi. Điều này rất quan trọng cho phân tích sau chuyến bay.
Ví dụ, khi triển khai trạng thái CẤP CỨU BAY LÊN trạng thái, mã nguồn không được chặn. Nó nên sử dụng bộ đếm thời gian không chặn để giám sát độ cao. Nếu độ cao không tăng trong một khoảng thời gian nhất định, nó phải kích hoạt sự kiện hết thời gian và chuyển sang LỖI.
Chiến lược kiểm thử và xác minh 🧪
Trước khi triển khai drone, logic máy trạng thái phải được xác minh. Mô phỏng là phương pháp hiệu quả chi phí nhất. Bằng cách tạo ra một bộ mô phỏng phần mềm mô phỏng đầu vào cảm biến, các kỹ sư có thể kiểm thử mọi hành trình khả thi qua sơ đồ trạng thái mà không phải mạo hiểm phần cứng.
Các hoạt động kiểm thử chính bao gồm:
- Kiểm thử biên: Kiểm thử các chuyển đổi phụ thuộc vào ngưỡng cụ thể. Ví dụ, xác minh rằng chuyển đổi sang TRỞ VỀ NHÀ xảy ra chính xác khi pin giảm xuống dưới 30%, chứ không phải ở 29% hay 31%.
- Phủ đường đi: Đảm bảo mọi đường chuyển đổi trong sơ đồ được đi qua ít nhất một lần trong quá trình kiểm thử. Điều này xác nhận rằng logic cho mọi sự kiện đều hoạt động.
- Kiểm thử ngắt: Mô phỏng các sự kiện cần ngắt trạng thái hiện tại. Xác minh hệ thống thoát đúng cách ĐANG ĐIỀU HƯỚNG và chuyển sang THẢNG CẤP CỨU ngay cả khi một phép tính dài đang chạy.
- Kiểm thử khởi động lại: Xác minh hệ thống có thể khôi phục từ trạng thái LỖI trạng thái. Liệu có thể khởi động lại thủ công thành DỪNG CHẠM mà không cần khởi động lại bằng nguồn điện vật lý?
Cũng có thể sử dụng các công cụ kiểm tra mô hình. Những công cụ này xác minh toán học rằng máy trạng thái không chứa các trạng thái chết (trạng thái mà không có chuyển tiếp nào khả thi) hoặc các trạng thái không thể tiếp cận (trạng thái không thể vào được từ trạng thái ban đầu).
Những sai lầm phổ biến cần tránh ⚠️
Ngay cả với sơ đồ được thiết kế tốt, lỗi triển khai vẫn có thể xảy ra. Dưới đây là những vấn đề phổ biến được quan sát trong các hệ thống điều khiển drone.
- Thiếu chuyển tiếp: Dễ dàng quên mất một chuyển tiếp cho một sự kiện cụ thể. Ví dụ, điều gì xảy ra nếu pin hết trong khi ở trạng thái THẢNG CẤP CỨU? Drone vẫn phải thực hiện thao tác hạ cánh kiểm soát hoặc logic bảo vệ rơi tự do.
- Sự nhầm lẫn về trạng thái: Sử dụng quá nhiều trạng thái tương tự nhau. Ví dụ, việc có cả hai trạng thái LƯU LẠI và ĐANG CHỜ có thể gây nhầm lẫn. Kết hợp chúng nếu hành vi của chúng giống nhau.
- Thao tác chặn: Không dùng mã chặn bên trong hành động trạng thái. Nếu một hành động chờ cảm biến, toàn bộ máy trạng thái sẽ bị đóng băng. Thay vào đó, hãy dùng callback bất đồng bộ hoặc cờ (flags).
- Vòng lặp không mong muốn: Đảm bảo không có vòng lặp vô hạn giữa các trạng thái tiêu tốn vòng lặp CPU mà không thực hiện công việc hữu ích. Ví dụ, một vòng lặp giữa LỖI và DỪNG CHẠY mà không có lệnh khởi động lại sẽ dẫn đến lỗi hệ thống.
Tóm tắt lợi ích 🏆
Thiết kế hệ thống điều khiển drone bằng sơ đồ Máy trạng thái mang lại nhiều lợi thế vượt trội so với lập trình thủ tục truyền thống. Nó đảm bảo sự phân tách rõ ràng giữa các khía cạnh quan trọng, giúp mã nguồn dễ đọc và dễ gỡ lỗi hơn. Bằng cách xác định rõ ràng các trạng thái và chuyển tiếp, các nhà phát triển đảm bảo hệ thống hoạt động một cách dự đoán được trong mọi tình huống.
Cách tiếp cận này thúc đẩy sự hợp tác giữa các đội ngũ phần cứng và phần mềm. Sơ đồ đóng vai trò như một ngôn ngữ chung. Các kỹ sư phần cứng có thể thấy chính xác thời điểm cảm biến được đọc, còn các kỹ sư phần mềm có thể thấy khi nào các bộ chấp hành được lệnh. Điều này cũng giúp đơn giản hóa việc đưa thành viên mới vào đội, vì logic được trực quan hóa thay vì bị ẩn trong các cấu trúc mã phức tạp.
Cuối cùng, khoản đầu tư vào việc thiết kế một máy trạng thái mạnh mẽ sẽ mang lại hiệu quả về độ tin cậy. Một chiếc drone tự hành là một hệ thống phức tạp, và việc quản lý hành vi của nó đòi hỏi phương pháp có kỷ luật. Bằng cách tuân thủ các tiêu chuẩn UML và lên kế hoạch cẩn thận cho các chuyển tiếp, điều kiện bảo vệ và hành động, các kỹ sư có thể xây dựng các hệ thống an toàn, dễ bảo trì và hiệu quả. Nghiên cứu trường hợp này cho thấy dù logic có phức tạp, cấu trúc vẫn mang lại sự rõ ràng và kiểm soát đối với hành vi tự hành.
