











組み込みシステムは決定論的な動作に大きく依存している。デバイスが動作する際、特定の条件下で入力に対して予測可能な応答を示さなければならない。ステートマシン図は、しばしば統一モデリング言語(UML)の一部として用いられ、この動作の設計図となる。しかし、図をコードに変換する際に、エラーがしばしば隠れている。有限ステートマシン(FSM)における論理エラーは、システムの停止、予期しないリセット、あるいは安全上の危険を引き起こすことがある。🚨
このガイドは、ステートマシン設計内の論理エラーを特定し、解決するための構造的なアプローチを提供する。ステート遷移、ガード条件、階層構造の微細な点を理解することで、開発者は組み込みソフトウェアが意図した通りに動作することを確実にできる。
🧩 FSMの複雑さを理解する
ステートマシンは、システムの取りうる状態と、それらの間をどのように移動するかを定義する。組み込み環境では、これにハードウェアとのやり取り、タイマー、外部割り込みが含まれることが多い。単純な手続き型コードとは異なり、ステートマシンはコンテキストを保持する。コンテキストが失われたり破損したりすると、論理が失敗する。
FSMが特に重要となる一般的な状況には以下が含まれる:
- 通信プロトコル(例:UART、SPI、I2Cの状態処理)
- ユーザーインターフェースのナビゲーション(例:ボタン入力、画面遷移)
- 電力管理モード(例:スリープ、アクティブ、スタンバイ)
- モーター制御シーケンス(例:起動、実行、停止、エラー)
トラブルシューティングを行う際、実装バグと設計上の欠陥を明確に区別することが重要である。図自体が有効なシナリオをカバーしていない場合、それは設計上の欠陥である。一方、コードが図の指示に従っていない場合は、実装バグである。
⚠️ 組み込みステートマシンにおける一般的な論理エラー
ステート論理のデバッグには細部への注意が求められる。特定のエラーパターンが頻繁に繰り返される。これらのパターンを認識することで、解決プロセスが迅速化する。
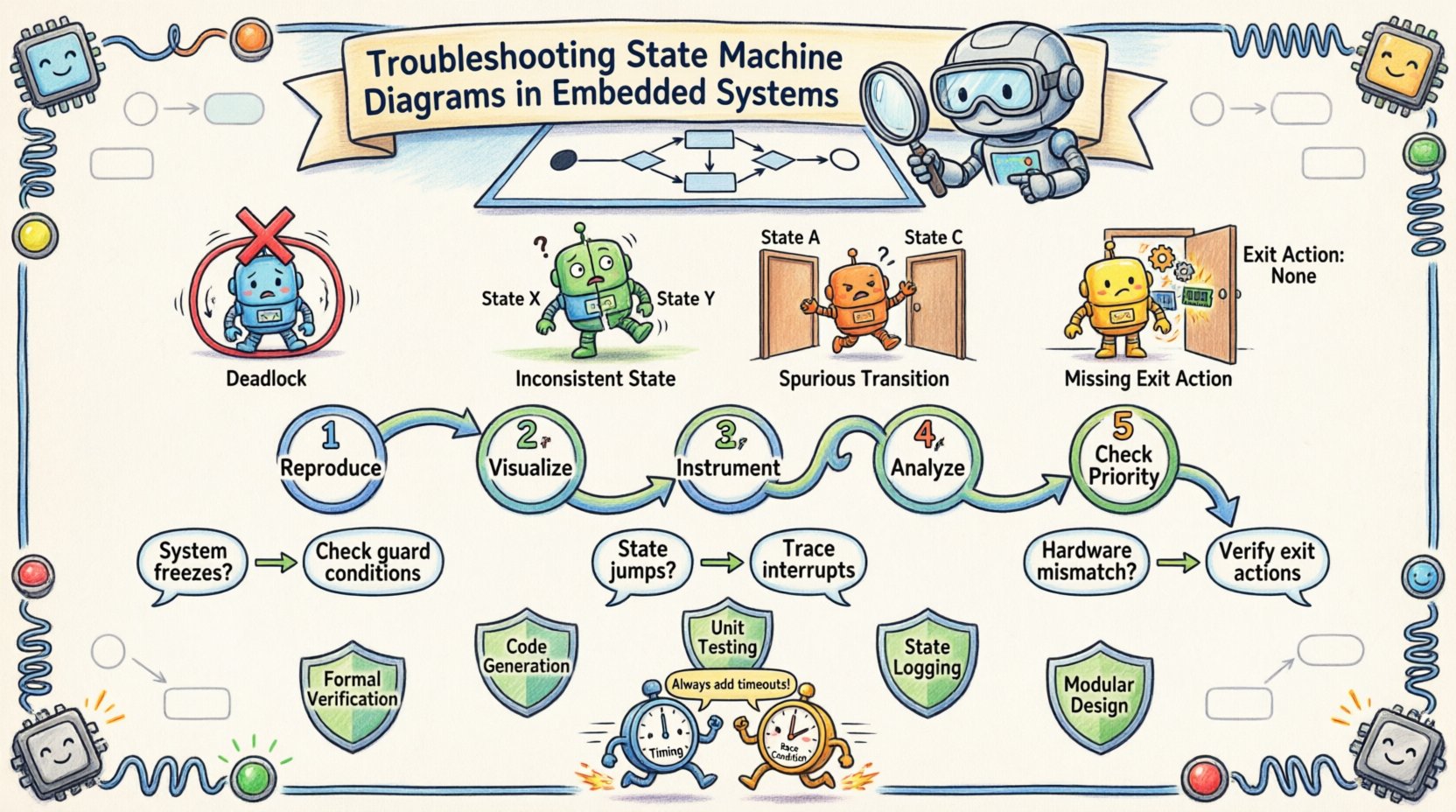
1. デッドロックの状況
デッドロックとは、システムが遷移が可能な状態にないにもかかわらず、終端状態やエラー状態ではない状態に入ってしまうことである。プロセッサは、決して到達しないイベントを待って無効な状態に留まる。これはしばしば以下の原因による:
- 未処理のイベントに対するデフォルトの遷移(自己ループ)が欠落している。
- 常に偽となるガード条件。
- ステートマシンがイベントフラグを確認する前に、論理的にそのフラグをクリアしてしまう。
2. 不正な遷移
不正な遷移とは、システムがすべきでない状態に移行してしまう現象である。これは通常以下の原因から生じる:
- 複数のイベントが、適切な排他処理なしに同じ遷移経路をトリガーする。
- 古いイベントが新しい状態をトリガーするような、イベントキューの誤った処理。
- 適切に同期されていない並行状態。
3. 状態の不整合
内部変数がマシンの現在の状態と一致しないときに発生する。たとえば、図ではモーターが「実行中」の状態にあるが、ハードウェアレジスタでは「停止中」と表示されている場合がある。この同期のずれは、その後の遷移に混乱をもたらす。
4. エグジットアクションの欠落
複雑なマシンでは、状態を退出する際にクリーンアップが必要なことがよくある。コードでエグジットアクションが省略されているが、設計には存在する場合、リソース(メモリやロックなど)が解放されず残り続ける。時間とともに、これによりリソース枯渇が発生する。
📊 エラーの種類と症状
下記の表を参照し、観察された動作を潜在的な原因にマッピングする。
| 観察された症状 | 潜在的な根本原因 | 診断の焦点 |
|---|---|---|
| 特定の入力でシステムがフリーズする | デッドロックまたは漏れている遷移 | イベントキューとガード条件を確認する |
| 状態が予期せずジャンプする | 誤動作の遷移またはレースコンディション | 割り込みタイミングとイベントフラグをトレースする |
| ハードウェアが状態と一致しない | 終了アクションまたは更新が欠落している | 終了時のハードウェアレジスタ書き込みを確認する |
| 負荷下での断続的な障害 | タイミングまたはレースコンディション | スタック使用状況とタイマー間隔を分析する |
| システムが誤った状態で起動する | 初期化エラー | リセットハンドラとデフォルト状態を確認する |
🔍 ステップバイステップの診断ワークフロー
論理エラーが発生した際は、体系的なアプローチを取ることで無駄な時間を防ぐ。推測せず、測定せよ。
1. 問題の再現
エラーが再現可能であることを確認する。問題が断続的な場合、条件を特定しようとする。障害に至るイベントの順序を記録する。状態機械は決定論的であるため、同じシーケンスをトリガーすれば、同じ結果が得られるはずである。
2. フローの可視化
UML図を開く。視覚的に経路をトレースする。開始状態とターゲット状態を強調する。図に隙間がないか確認する。図はすべての状態で可能な入力すべてを考慮しているか?入力が図に描かれていない場合、コードがそれを無視しているか、誤って処理している可能性がある。
3. コードのインストルメント化
重要な遷移ポイントにログを追加する。高価なツールは必要ない。単純なprint文やGPIOピンのトグルで、実行時のシステム状態を明らかにできる。以下の情報をログに記録する:
- 現在の状態ID
- トリガーイベント
- ガード条件の評価
- ターゲット状態
4. 状態の進入および退出を分析する
エントリーやエグジットアクションが発火しているか確認してください。多くの場合、遷移は発生しますが、副作用(ピンをHIGHに設定するなど)は発生しません。ステートマシンのロジックがエントリー直後にハードウェアを即座に更新することを確認してください。
5. イベントの優先順位を確認する
複数のイベントが同時に発生した場合、どのイベントが優先されるべきか?コードは明確な優先順位を定義しなければなりません。コードがイベントAを優先しているが、設計ではイベントBを想定している場合、ロジックがずれてしまいます。
🧠 深掘り:ガード条件とトリガーイベント
ガード条件は、遷移が発生するためには真でなければならないブール式です。これらはステートマシンの論理ゲートです。遷移パスは存在するものの、条件がそれを阻止するため、ここでのエラーは微妙です。
ガード条件のよくある落とし穴
- 変数のスコープ:ガード条件で使用される変数が、予期したタイミングで更新されていない可能性があります。割り込みでフラグが設定されても、メインループで読み込まれる場合、タイミングの問題が発生します。
- 論理の否定: 単純なタイプミス、たとえば”
!=を”==と使用することにより、全体の論理フローが逆転します。 - 副作用: ガード条件は一般的に読み取り専用であるべきです。ガード条件がグローバル変数を変更すると、追跡が難しい隠れた状態変化が生じます。
イベント処理のニュアンス
イベントはトリガーです。それらは次の通りです:
- シグナル: 非同期入力(例:ボタン押下)。
- タイマー: 定期入力(例:ウォッチドッグタイマーの刻み)。
- エラー: 特異な入力(例:CRC不一致)。
イベントの発生源は処理後、必ずクリアしてください。イベントフラグが残っていると、ステートマシンが同じイベントを2回処理する可能性があり、誤った遷移を引き起こします。
🏗️ ハイエラルキカルステートと継承の管理
複雑なシステムでは、図の混雑を減らすために階層的ステートを使用します。親ステートは子ステートを含みます。遷移は親レベルで発生し、すべての子ステートに影響を与えます。
階層構造に関する問題
階層的ステートのデバッグ時に、ステートが実際にどこに存在するかについて混乱が生じることがよくあります。
- 暗黙の遷移: 子ステートから兄弟ステートに移行する場合、親ステートを退出する必要があることがよくあります。親ステートの退出アクションが正しく実行されることを確認してください。
- デフォルトエントリポイント: 親ステートに入ると、どの子ステートがアクティブになりますか?デフォルトの子ステートが定義されていない場合、システムは未定義の状態に留まる可能性があります。
- ローカル遷移とグローバル遷移: 子ステートで定義された遷移は、親が処理するイベントによって発動する可能性があります。イベントのスコープを理解してください。
階層構造のベストプラクティス
- ネストの深さを最小限に抑えること。深い階層構造は追跡が困難です。
- すべての複合ステートに対して明示的なデフォルトステートを使用する。
- 親ステートの退出アクションの動作を明確にドキュメント化する。
⏱️ タイミングとレースコンディション
組み込みシステムはリアルタイムで動作します。ステートマシンもタイミングの問題に影響されません。レースコンディションは、結果がイベントの相対的なタイミングに依存する場合に発生します。
割り込み処理とメインループ
多くの場合、ステートイベントは割り込みサービスルーチン(ISR)で生成されますが、メインループで処理されます。メインループが遅いと、イベントが蓄積されます。ISRがメインループがフラグを確認する前にフラグをクリアすると、データが失われます。
入力のデバウンス
物理的なボタンはバウンスします。ステートマシンが1回の押下を複数回の押下と解釈すると、ステート図を正しく遷移しません。ハードウェアに頼るのではなく、ステートマシン内にデバウンスロジック(例:「待機」ステート)を実装してください。
タイムアウト
外部入力待ちのすべてのステートにはタイムアウトを設定する必要があります。予期されたイベントが指定された期間内に到着しなかった場合、システムはエラー状態または回復状態に遷移すべきです。これにより、前述のデッドロック状況を防ぐことができます。
🛡️ ロバスト設計のための予防戦略
エラーの修正は反応的です。それらを回避するように設計することは予防的です。以下の戦略により、将来のプロジェクトにおける論理エラーの発生可能性を低減できます。
- 形式的検証:可能な限り、形式的手法を用いてステートの到達可能性を検証する。これにより、すべてのステートが到達可能であり、デッドロックが存在しないことを保証できる。
- コード生成:ステート図モデルからコードを生成する。これにより、設計と実装のギャップを小さくし、人的ミスを最小限に抑える。
- ユニットテスト:ステートマシンを他のモジュールと同じように扱う。すべてのステートとすべての遷移に対してテストを書く。成功経路とエラー経路の両方をカバーする。
- ステートログ:ファームウェアにステートロガーを含める。現場でこのデータを分析することで、物理的アクセスなしに問題を再現できる。
- モジュール設計:大きなステートマシンを、相互に作用する小さなサブマシンに分割する。これにより、メンタルモデルが簡素化され、障害が局所化される。
🧰 ツールと分析技術
特定のソフトウェアツールは異なるが、基盤となる分析手法は一貫している。
静的解析
ソースコードに対して静的解析を実行する。次を確認する:
- 到達不可能なコードブロック。
- 状態論理における未使用の変数。
- 状態値を隠す可能性のある変数の隠蔽。
動的解析
デバッガーを使用して遷移を1ステップずつ確認する。
- 状態のエントリおよびエグジット関数にブレークポイントを設定する。
- 実行中に状態変数を注意深く監視する。
- 入力キューを監視して、イベントが順序通りに処理されていることを確認する。
ハードウェアインザループテスト
実際のハードウェア信号を使って状態機械をテストする。シミュレートされた入力は、ノイズや遅延といった電気的特性を欠きがちであり、それらが論理エラーを引き起こすことがある。
📝 メンテナンスに関する最終的な考察
状態機械の維持には規律が必要である。要件が変化するたびに図面を更新しなければならない。図面がコードと同期して更新されなければ、技術的負債は急速に蓄積する。図面と一致しなくなった状態機械は、時限爆弾のようなものである。
状態論理の定期的なレビューは不可欠である。新しい機能を追加する際には、既存の遷移と照らし合わせる。既存の経路と衝突するか?新たなデッドロックを引き起こすか?設計文書を最新の状態に保ち、コードと整合性を保つことで、システムは安定した状態を維持できる。
組み込み論理のデバッグはパズルのようである。忍耐力、正確さ、そしてシステムアーキテクチャに対する深い理解が求められる。ここに示された構造化されたアプローチに従うことで、開発者は論理エラーを効率的に解決し、信頼性の高い組み込みシステムを構築できる。
