











組み込みシステムは厳格な制約の下で動作する。メモリは有限であり、タイミングは極めて重要で、信頼性は妥協できない。このような環境において、動作を明確に定義することは極めて重要である。統一モデリング言語(UML)のステートマシン図は、動的動作をモデル化するための構造化されたアプローチを提供する。しかし、リソース制約のある環境における適用可能性や複雑さについて、誤解が根強く残っている。このガイドでは、事実と虚構を明確に分けることで、実際の組み込み設計におけるステートマシンの動作原理について技術的に深く掘り下げる。メカニズムを検証し、一般的な誤りを解明し、誇張や曖昧な一般化に頼らず、実用的な実装戦略を提示する。 🧐
組み込み環境におけるステートマシン図の理解 ⚙️
ステートマシン図は、しばしばステートチャート図と呼ばれる。これは、状態、遷移、イベント、アクションを通じてシステムの動作をモデル化するものである。組み込み工学においては、これによりデバイスが時間とともに入力にどう反応するかが表現される。単純なフローチャートとは異なり、ステートマシンはその履歴を記憶する。この記憶機能は、複数の操作にわたって状態を維持しなければならないシステムにとって不可欠である。
単純な信号機コントローラを考えてみよう。システムは色を変えるだけでなく、現在のフェーズを記憶し、次のフェーズに移行する前に特定の時間待つ。ステートマシンはこの論理を明確に捉える。以下を定義する:
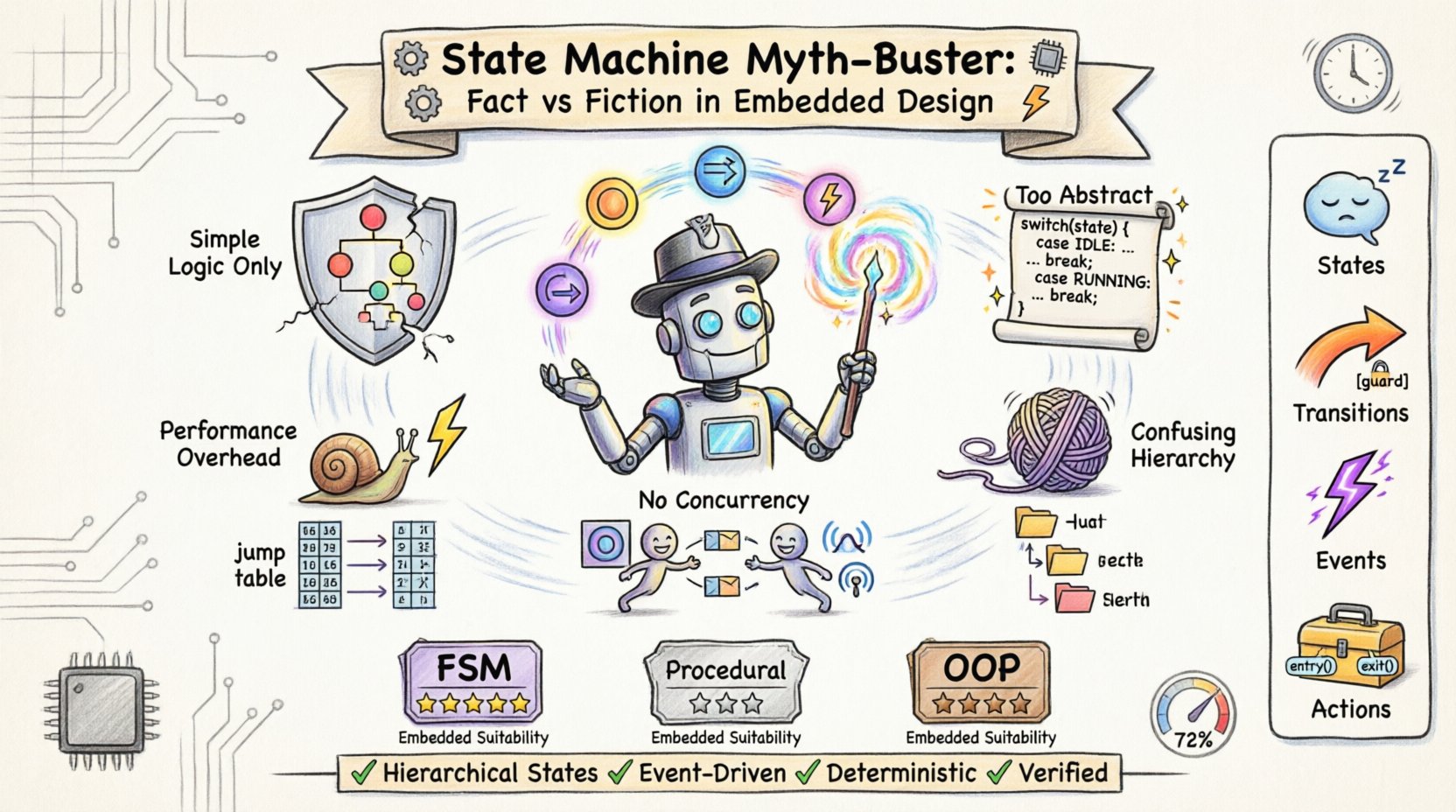
- 状態:システムが活動を実行するか、イベントを待つ状態や状況。例としてアイドル, アクティブ, エラー、またはスリープモード.
- 遷移:トリガーに基づいて一つの状態から別の状態へ移行する経路。これは、遷移が有効かどうかを判断するガード条件を含む。
- イベント:遷移を引き起こす信号。これらは内部(ソフトウェア)または外部(ハードウェア割り込み)のものである。
- アクション:状態に入ること、出ること、またはその状態に留まっている間に実行される活動。エントリアクションは変数を初期化し、エグジットアクションはリソースをクリーンアップする。
これらの要素を視覚化することで、エンジニアはコードを1行も書く前に論理を検証できる。これにより、開発サイクルの後半におけるデバッグ時間を削減できる。しかし、この手法にはいくつかの誤解が存在する。
誤解1:FSMは単純な論理用だけである 🚫
一般的な誤解として、有限状態機械(FSM)は複雑な組み込みアプリケーションにはあまりにも単純すぎるというものがある。多くの開発者は、より柔軟に感じられる手続き型コードやオブジェクト指向構造を好む。しかし、この見方は階層的状態機械の力を無視している。
現代のUMLでは、状態をネストできる。これにより、複合状態が可能になる。複合状態はサブ状態を含む。システムが複合状態に入ると、特定のサブ状態にデフォルトで移行する。この構造により、重複を削減できる。例えば、通信状態には、リスニング, 送信中、そして再試行中.
TCP/IPスタックやBluetoothのハンドシェイクなど、複雑なプロトコルは状態論理に大きく依存している。イベントの順序は厳格に定義されている。状態機械はこの厳格さを自然に強制する。接続が確立される前など、無効な状態にシステムが進入することを防ぐ。
事実確認:
- 誤解:FSMは単純なオン/オフ論理しか扱えない。
- 事実:階層的な状態機械は、複雑なプロトコルスタックや複数ステップのワークフローを効率的に処理できる。
- 事実: 確定的な動作を提供するため、安全に重要なシステムにとって不可欠である。
誤解2:UMLは組み込みコードには抽象的すぎる 📄
一部のエンジニアは、UML図は効率的なマシンコードに翻訳するには抽象度が高すぎると言っている。設計と実装の間にギャップが生じ、肥大化したソフトウェアになることを懸念している。初期のツールはこの点で苦労したが、設計とコードの関係は直接的である。
状態機械図は、状態遷移表またはswitch-caseCまたはC++の構造に直接対応する。コンパイラは視覚的な図を解釈する必要はない。開発者が論理を翻訳する。図は仕様として機能する。コードが図と一致していれば、動作は予測可能になる。
実装マッピング:
| UML要素 | 実装同等 | 目的 |
|---|---|---|
| 状態 | 列挙値または構造体 | 現在のモードを識別する |
| 遷移 | 条件分岐(if/else) | 論理フローを定義する |
| イベント | 関数呼び出しまたは割り込み | 状態変更をトリガーする |
| エントリーアクション | 初期化関数 | ハードウェア/変数の設定 |
| エグザイトアクション | クリーンアップ関数 | リソースの解放 |
この明確さはコードレビューを支援する。バグが発生した際、エンジニアは図の経路を追跡できる。図ではイベントXで状態Aから状態Bへ移行するとされているが、コードではそれとは異なる場合、その違いはすぐに明らかになる。
誤解3:パフォーマンスのオーバーヘッドは許されない ⏱️
組み込みシステムはしばしばCPUサイクルが限られたマイコン上で動作する。状態機械の論理が許容できないオーバーヘッドをもたらすという根強い不安がある。この考え方は、状態機械がどのようにコンパイルされるかを無視している。
現代のコンパイラは状態論理を非常に効果的に最適化する。結果として得られるマシンコードは、しばしば比較とジャンプの連鎖であり、switch文に似ている。オーバーヘッドは、ハードウェアI/Oやセンサーのポーリングのコストと比べて無視できるほど小さい。実際、適切に設計された状態機械は、ポーリングループを減らすことでパフォーマンスを向上させることができる。
最適化戦略:
- ジャンプテーブル: 遷移はジャンプテーブルを用いて実装でき、逐次的な
if-elseチェーンではなく、O(1)の検索時間で実現できる。 - 最小限の状態保存: 状態は単一の整数やビットとして保存でき、最小限のRAMを消費する。
- イベント駆動型実行: システムはイベントが発生したときのみ処理を行い、ビジーウェイトループを回避する。
これは、必要がないにもかかわらず毎ミリ秒ごとにすべてのセンサーをチェックするポーリングループと対照的である。状態機械を用いることで、イベントが発生するまでシステムがスリープできるため、電力とCPUサイクルを大幅に節約できる。
誤解4:階層的な状態は混乱を招く 🤯
設計者はしばしば階層的な状態を避け、図が読みにくくなると考える。ネストの深さが論理を追うことを難しくするのではないかと心配する。過度なネストは悪い習慣だが、適切な階層構造は明確さを高める。
以下のような電源管理状態を考えてみよう。それは通常動作, 低消費電力、およびスリープ。これらの状態がフラットな状態であった場合、すべてのサブ状態から外部状態への遷移を個別に定義する必要があり、数百本の線を持つ「スパゲッティ」図が生じます。
階層構造を用いることで、遷移は複合レベルで定義されます。低消費電力からシャットダウンすべてのサブ状態に適用され、上書きされない限り、この遷移はすべてのサブ状態に適用されます。これにより図の混雑が軽減され、一貫性が保たれます。これは能力の問題ではなく、規律の問題です。
誤解5:状態機械では並行処理が不可能である 🔄
古い状態機械の定義では並行処理に対応できませんでした。単一スレッドでは、常に1つの状態しか存在しません。開発者はこれが組み込みシステムが複数のプロセスを同時に処理できないことを意味すると考えました。
UML 2.0では直交領域が導入されました。1つの状態に複数の独立した領域を含めることができます。これらの領域は並行して動作します。たとえば、デバイスが表示を管理する領域とネットワーク接続を管理する領域を持つことができます。両方の領域は同じ複合状態内に存在しますが、それぞれ独立して進化します。
この機能は現代のIoTデバイスにとって不可欠です。ユーザー入力を処理しつつ、同時にクラウドと通信しなければなりません。直交領域は、複数のスレッドや複雑なミューテックスロックをコード構造に必要とせずに、この並行性をモデル化します。
比較:FSM vs. 手続き型 vs. オブジェクト指向 📊
状態機械が適している場所を理解するためには、他のモデル化アプローチと比較する必要があります。それぞれのアプローチには、プロジェクトの要件に応じて強みと弱みがあります。
| アプローチ | 最適な使用ケース | 制限 | 組み込みシステムへの適性 |
|---|---|---|---|
| 状態機械 | 離散イベントシステム、プロトコル処理、制御論理。 | 連続的なデータ処理にはあまり適していない。 | ⭐⭐⭐⭐⭐(高) |
| 手続き型 | シンプルなスクリプト、線形アルゴリズム。 | 複雑さが増すにつれて、論理の維持が難しくなる。 | ⭐⭐⭐(中) |
| オブジェクト指向 | 複雑なデータ関係、UIアプリケーション。 | より大きなメモリ使用量、潜在的な実行時オーバーヘッド。 | ⭐⭐⭐⭐(高) |
状態機械は、イベントの順序がデータそのものよりも重要となる場面で優れた性能を発揮する。システムがモーターが安全ドアが閉じられてからでないと起動しないことを保証する必要がある場合、状態機械はこのルールを厳密に適用する。手続き型コードでは、条件チェックが誤った関数に配置されている場合、このエッジケースを見逃す可能性がある。
実装のベストプラクティス 🛡️
堅牢な状態機械を設計するには、特定のパターンに従う必要がある。これらの実践により、コードが保守可能でバグフリーの状態を保つことができる。
- 1つの遷移ごとに1つの状態:異なるソースから同じ状態への複数の遷移を避ける。必要がない限りは、履歴状態複合状態に戻る場合、以前のサブ状態を記憶するために使用する。
- ガード条件:ガード条件はシンプルに保つこと。ガード内の論理が複雑な場合は、別関数に移動する。これにより図が明確に保たれる。
- 自己遷移:状態を変更しないがアクションをトリガーするイベントに自己遷移を使用する。たとえば、中断イベントがアイドル状態にあるときに、状態を離れないままフラグをトグルする可能性がある。
- デフォルトエントリ:複合状態には常にデフォルトのエントリポイントを定義する。これにより、システムが未定義の構成で起動するのを防ぐ。
- エラー処理: 以下の状態を含める:エラー または リセット状態。すべてのシステムは最終的に失敗する。状態機械は、どのようにして滑らかに復旧するかを定義しなければならない。
避けるべき一般的な落とし穴 🚧
経験豊富なエンジニアですら、状態機械を設計する際につまずくことがある。一般的な罠に気づくことで、それらを回避できる。
1. スパゲッティ遷移
すべての状態が他のすべての状態に接続されると、図は読みにくくなる。これは通常、階層構造の欠如を示している。関連する状態を複合コンテナにグループ化することで、線の交差を減らすことができる。
2. デフォルトの遷移が欠落している
イベントが発生したが、現在の状態に一致する遷移が存在しない場合、システムはどのように対処すべきかを知っている必要があります。イベントを無視すべきか?クラッシュすべきか?明確に「無視」の動作、または「リセット」の動作を明確に定義する。
3. 歴史状態の過剰使用
深い歴史状態は混乱を招くことがあります。システムが複合状態に入ると、前回そこにいた際の正確な部分状態を記憶するのでしょうか?場合によっては、履歴を復元するよりも、既知の初期部分状態にリセットするほうが安全です。
4. データとロジックの混同
データの保存を状態ロジックから分離してください。状態機械は「何が起こるかを規定すべきであり、「どのようにデータが保存されるかを管理すべきではありません。状態をトリガーする関数にデータの処理を任せるようにしてください。
状態機械のデバッグ 🔍
組み込みコードのデバッグは困難です。状態遷移の追跡はさらに複雑さを加えます。しかし、適切に文書化された状態機械は、デバッグを容易にします。
- 状態ログ記録:すべての状態の入退出を記録するロガーを実装してください。これにより、システムのライフサイクルのトレースが可能になります。
- 可視化シミュレーション:展開前に図をシミュレートするツールを使用してください。これにより、論理エラーを早期に発見できます。
- ウォッチポイント:状態エントリ関数にブレークポイントを設定してください。遷移が完了する前に変数が正しく初期化されていることを確認してください。
システムがフリーズした場合、現在の状態を確認してください。状態が有効であるにもかかわらずシステムが無限に待機している場合、欠落しているイベントや、決して真にならないガード条件が原因である可能性が高いです。これは線形スクリプトのデバッグと比べて、検索範囲を大幅に絞り込むことができます。
形式的検証の役割 🧪
自動車や医療など、安全が重要な産業では、状態機械はしばしば形式的検証の対象となります。このプロセスにより、システムが要件を満たしていることを数学的に証明できます。
状態機械は離散的かつ有限であるため、汎用ソフトウェアよりも検証が容易です。ツールはすべての可能な状態と遷移を網羅的にチェックできます。これにより、到達不可能なコードが存在しないこと、およびシステムがデッドロックに入ることはないことが保証されます。
UML状態図を使用すると、この検証が容易になります。図が正式な仕様として機能します。コードが図と一致し、図が検証された場合、システムも検証されたことになります。この信頼の連鎖は認証において非常に価値があります。
組み込み論理に関する最終的な考察 🏁
状態機械図は万能の解決策ではありませんが、強力なツールです。複雑さに秩序をもたらします。抽象的な要件を具体的な動作に変換します。性能、複雑さ、使いやすさに関する誤解を払拭することで、エンジニアはこの手法をより効果的に活用できます。
成功の鍵は規律にあります。階層構造を使って複雑さを管理してください。明確なエントリポイントとエグジットポイントを定義してください。遷移を文書化してください。状態機械の構造を尊重することで、結果として得られる組み込みシステムは安定的で、予測可能かつ保守可能になります。最も高度なツールを使うことが目的ではなく、仕事に適したツールを使うことが目的です。イベント駆動型の組み込みシステムにおいて、状態機械は信頼性の高い設計の基盤のままです。
スキルをさらに磨き続けましょう。UML 2.0の細部を学びましょう。直交領域を探索しましょう。独自の状態機械ライブラリを実装しましょう。そうすることで、組み込み設計の制約が障害ではなく、より良いアーキテクチャへのガイドであることに気づくでしょう。
