











設計物聯網的嵌入式系統不僅需要接線和程式碼,更需要對邏輯流程與系統行為有清晰的理解。UML 狀態機圖這張圖是邏輯的藍圖。在本指南中,我們探討智慧家庭溫濕度感測器的設計流程。我們著重於可靠性、省電效率以及明確的狀態轉換,且不依賴特定的商業工具。
📡 為何狀態機在物聯網中至關重要
物聯網裝置運作於不可預測的環境中。網路連線不穩定,電源來源多變,外部觸發也為非同步。線性腳本無法有效處理這些複雜性。狀態機提供了一種結構化的方法來管理系統行為。
- 可預測性: 每一個動作都與特定狀態和事件相關聯。
- 健壯性: 非法輸入會透過錯誤狀態明確處理。
- 可維護性: 邏輯變更僅限於特定的轉換。
對於感測器裝置而言,電池壽命通常是主要限制因素。狀態機決定了無線電何時進入休眠狀態,何時喚醒。此決策過程必須精確。
🔍 定義系統範圍
在繪製圖表之前,我們先定義功能需求。本案例研究專注於獨立的感測器節點。它不需要複雜的使用者驗證或直接寫入雲端資料庫。其主要任務是資料收集與傳輸。
核心功能:
- 讀取感測器資料(溫度、濕度)。
- 連接至本地閘道器。
- 傳輸資料封包。
- 進入低功耗模式以節省電池。
- 妥善處理通訊錯誤。
⚙️ 識別狀態
圖表的基礎是狀態清單。狀態代表系統執行特定動作或等待事件的條件。針對此感測器,我們識別出以下幾個不同的狀態。
1. 開機狀態(初始)
這是進入點。系統執行硬體檢查,驗證微控制器與感測器模組的完整性。
- 進入動作: 初始化 GPIO 接腳。
- 離開動作: 從非揮發性記憶體載入設定。
2. 空閒/睡眠狀態
當設備未主動收集或傳送資料時,必須節省能源。這是電池供電設備最常見的狀態。
- 事件觸發: 定時器到期(例如每5分鐘一次)。
- 持續時間: 根據設定而變動。
3. 測量狀態
感測器啟動以收集物理資料。此狀態會啟用ADC(類比轉數位轉換器)。
- 進入動作: 開機感測器模組。
- 處理: 讀取原始值,套用校準偏移量。
- 退出動作: 關閉感測器模組以節省能源。
4. 連線狀態
資料準備就緒後,設備會嘗試連接到網關。此狀態負責無線電初始化與握手協定。
- 事件觸發: 資料就緒旗標。
- 超時: 關鍵。若無法連接到網關,系統不得卡住。
5. 傳輸狀態
實際的資料封包會透過網路介面傳送。
- 進入動作: 格式化封包,加入校驗碼。
- 退出動作: 清除傳輸緩衝區。
6. 錯誤狀態
若發生嚴重失敗(例如感測器讀取失敗、網路超時),系統將進入此狀態。系統會記錄錯誤並嘗試執行恢復程序。
- 事件觸發: 異常處理程式。
- 恢復:重試邏輯或重新啟動。
🔄 定義轉移與事件
轉移定義系統如何從一個狀態移動到另一個狀態。它們由事件觸發,並由條件保護。在UML中,這些以連接狀態的箭頭表示。
關鍵轉移路徑:
- 空閒 → 測量:由定時器觸發。保護條件:電池電量 > 10%。
- 測量 → 連接:由資料取得完成觸發。
- 連接 → 傳輸:由成功的網路握手觸發。
- 連接 → 錯誤:由網路超時觸發。
- 傳輸 → 空閒:由收到確認訊號或傳輸完成觸發。
- 任何狀態 → 開機:由硬體重置觸發。
保護條件與動作:
保護條件確保只有在滿足特定條件時才會發生轉移。例如,當電池電量極低時,設備不應傳輸。
| 來源狀態 | 事件 | 保護條件 | 目標狀態 |
|---|---|---|---|
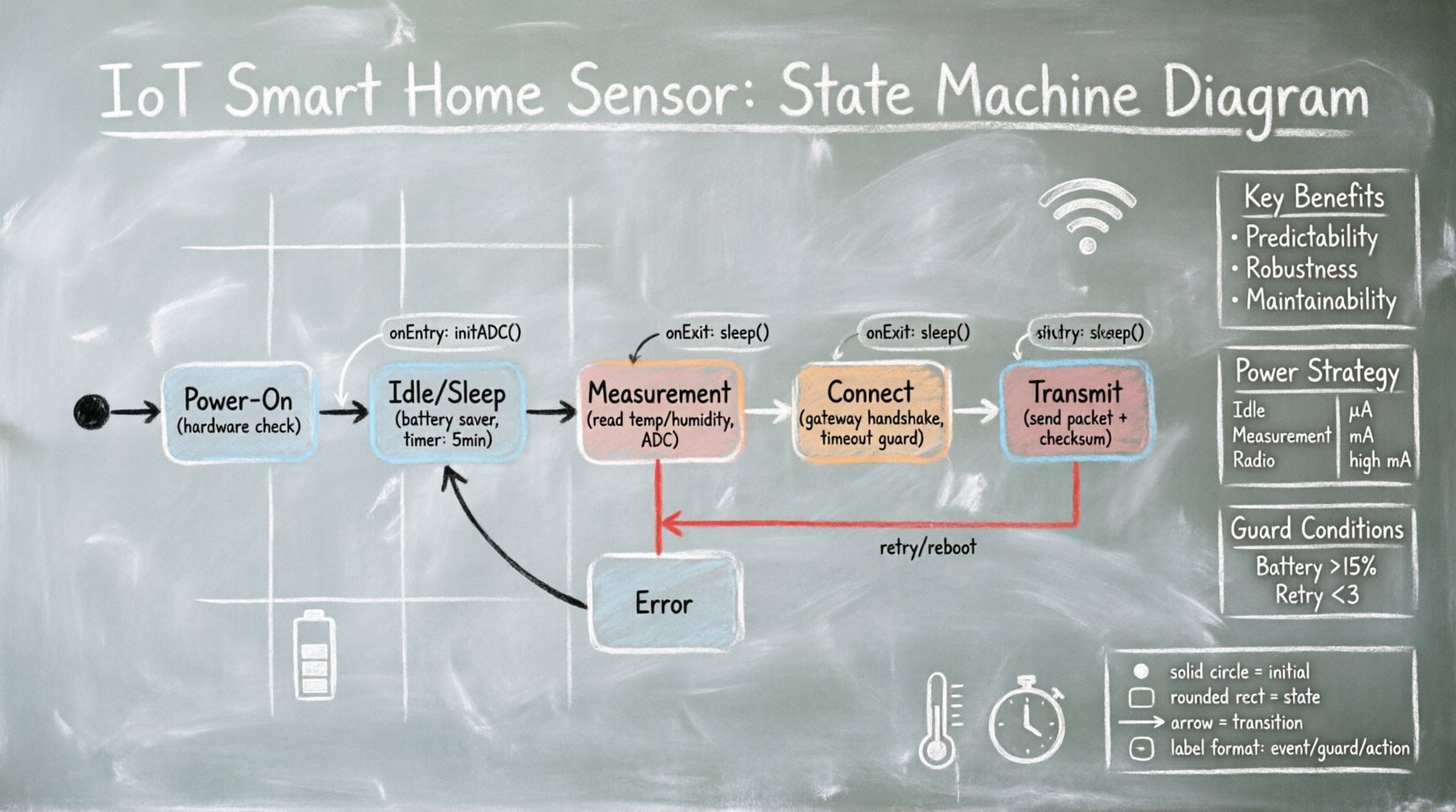
| 空閒 | 定時器到期 | 電池電量 > 15% | 測量 |
| 連接 | 超時 | 重試次數 < 3 | 連接 |
| 連接 | 逾時 | 重試次數 = 3 | 錯誤 |
| 發送 | 已收到確認訊號 | 真 | 閒置 |
| 測量 | 感測器故障 | 真 | 錯誤 |
📊 繪製圖示
建立視覺化表示需要遵循UML標準。這確保其他工程師能明確無誤地解讀圖示。
符號規則
- 狀態:圓角矩形,狀態名稱置中。
- 初始狀態: 一個實心黑色圓圈。
- 終止狀態: 一個實心黑色圓圈位於較大的圓圈內。
- 轉移: 實線搭配開口箭頭。
- 標籤: 事件 / 條件 / 動作(例如,
計時器/電池正常/開始測量).
層次結構與區域
複雜系統通常會使用複合狀態。例如,連接狀態可以分解為子狀態:
- 掃描: 正在搜尋網關。
- 驗證: 正在驗證憑證。
- 準備就緒: 連接已建立。
此層級結構在保持主要圖表清晰的同時,於需要時維持詳細邏輯。它還允許子狀態之間共享進入和退出動作。
🧠 實作考量
將圖表轉換為程式碼需要有紀律的方法。狀態機邏輯應與業務邏輯分離。
1. 狀態變數管理
目前的狀態必須儲存在一個跨函數呼叫持續存在的變數中。如果裝置意外重啟,狀態應理想地恢復到安全的預設狀態,例如閒置(Idle)。
2. 事件排隊
事件通常非同步發生。例如,當裝置處於測量狀態時,可能會收到網路封包。事件佇列會暫存這些訊號,以便系統準備就緒時再進行處理。
- 優先順序: 重大錯誤(例如電池電量不足)應優先於一般資料收集。
- 去抖: 物理按鈕或感測器雜訊可能觸發錯誤事件。去抖邏輯可防止狀態跳躍。
3. 超時與看門狗
如果轉移條件永遠無法滿足,狀態機可能會陷入迴圈。若系統在某狀態停留時間超過最大預期時長,看門狗計時器將重設系統。
範例情境:
- 系統進入連接狀態。
- 計時器啟動(例如:10秒)。
- 網路握手失敗。
- 計時器到期。
- 系統轉換至錯誤 狀態或重新啟動。
🛠️ 常見陷阱與解決方案
設計狀態機容易出現特定錯誤。了解這些錯誤有助於建立更穩健的系統。
陷阱 1:鑽石問題
避免多個轉移導致同一狀態卻無明確區分的情況。這會使除錯變得困難。
- 解決方案: 確保每個轉移都有獨特的事件或保護條件。
陷阱 2:遺漏退出動作
如果在未清理資源(例如關閉檔案句柄或釋放鎖)的情況下退出狀態,可能會導致記憶體洩漏或硬體掛起。
- 解決方案: 明確為圖表中的每個狀態定義退出動作。
陷阱 3:無限循環
在未消耗事件或增加計數器的情況下返回同一狀態的轉移可能會導致無限循環。
- 解決方案: 實作重試計數器,在失敗時遞增。
陷阱 4:過度複雜
試圖在主圖表中建模每一個邊界情況會使其難以閱讀。
- 解決方案: 使用巢狀狀態來處理複雜的子邏輯。保持頂層圖表專注於主要流程。
🔋 電力消耗策略
對於物聯網感測器而言,狀態機是電力管理的主要工具。每個狀態都有一個相關的電力成本。
| 狀態 | 電力模式 | 預估電流 | 持續時間 |
|---|---|---|---|
| 閒置 | 深度睡眠 | 低(微安範圍) | 分鐘 |
| 測量 | 啟用 | 中等(毫安範圍) | 秒 |
| 連接/傳輸 | 無線啟用 | 高(毫安範圍) | 秒 |
| 錯誤 | 啟用 | 中等 | 直到修復 |
優化在以下狀態所花費的時間連接 和 傳輸這兩個狀態的時間優化至關重要。如果網路不穩定,裝置應減少重試次數以節省電池電量。
📝 資料一致性與記錄
當感測器從測量 到 傳輸,資料完整性至關重要。狀態機應確保資料在傳送前不會被覆蓋。
- 雙緩衝:使用兩個記憶體緩衝區。一個正在被讀取,另一個正在被寫入。
- 校驗和:在網關接收時驗證資料完整性。如果封包損壞,網關會發送 NACK(否定確認)。
- 重試邏輯: 狀態機必須透過重新進入傳輸狀態並使用相同資料進行重試。
將錯誤記錄到非易失性記憶體(如EEPROM或Flash)中,可實現部署後的分析。錯誤狀態應在轉換到安全狀態之前寫入時間戳和錯誤代碼。
🚀 最終考量
建立狀態機圖是一種追求清晰度的練習。它迫使設計者考慮系統可能面臨的每種可能狀況。對於物聯網智慧家庭感測器而言,這種嚴謹性直接轉化為可靠性。
關鍵要點:
- 從根據使用者需求所列出的明確狀態清單開始。
- 明確地以事件和守衛來定義轉移。
- 使用層次結構來管理複雜性。
- 在狀態定時時,始終考慮功耗。
- 在每條關鍵路徑上規劃錯誤恢復。
一個設計良好的圖表可作為硬體與軟體團隊之間的合約。它能減少歧義,並確保最終產品即使在網路中斷或電池電量不足時,仍能按預期運作。透過遵循這些結構化步驟,開發者可以建立出穩健、高效且易於維護的系統。
請記住,目標不是預測未來,而是可靠地應對當下。有了穩固的狀態機基礎,感測器便能適應智慧家庭環境的動態特性。
