











La programación de robótica implica gestionar interacciones complejas entre sensores, actuadores y lógica de toma de decisiones. Cuando un robot opera de forma autónoma, debe manejar diversas condiciones sin intervención humana. Una máquina de estados finita (FSM) proporciona un método estructurado para modelar este comportamiento. Esta guía cubre diagramas de máquinas de estados UML específicamente para contextos de robótica, ayudándote a visualizar la lógica sin depender de herramientas de software específicas.
🧠 ¿Por qué usar máquinas de estados en robótica?
Los sistemas robóticos a menudo operan en entornos donde las entradas cambian de forma impredecible. Un script lineal no puede manejar fácilmente escenarios en los que el robot debe pausar, esperar a un sensor, reanudar o detenerse debido a un error. Las máquinas de estados descomponen el comportamiento en estados discretosestados. En cualquier momento dado, el robot se encuentra en un estado específico, y las transiciones ocurren cuando ocurren eventos específicoseventos ocurren.
Utilizar diagramas para representar esta lógica ofrece varios beneficios:
- Claridad:Las representaciones visuales son más fáciles de revisar que líneas de código.
- Modularidad:Comportamientos complejos pueden anidarse dentro de estados padres.
- Depuración:Es más fácil rastrear el flujo de control cuando la lógica se visualiza.
- Seguridad:Estados críticos como «Parada de emergencia» están claramente definidos y difíciles de pasar por alto.
📐 Componentes principales de un diagrama de máquina de estados
Para construir un diagrama, debes entender los bloques fundamentales. Estos elementos forman el vocabulario de tu diseño.
1. Estados (🟦)
Un estado representa una condición durante la cual el robot realiza una tarea específica o espera una condición. Los estados suelen dibujarse como rectángulos redondeados.
- Estado inicial: El punto de inicio, a menudo un pequeño círculo relleno.
- Estado final: El punto final, generalmente un círculo doble.
- Estado simple: Una condición única (por ejemplo,Inactivo, Cargando).
- Estado compuesto: Un estado que contiene subestados (por ejemplo, Navegación que contiene SeguirLínea y EvitarObstáculo).
2. Transiciones (➡️)
Una transición define cómo el sistema pasa de un estado a otro. Se representa con una línea con una punta de flecha.
- Disparador: El evento que causa el movimiento (por ejemplo, Botón Presionado, Obstáculo Detectado).
- Condición de guarda: Una expresión booleana que debe ser verdadera para que ocurra la transición (por ejemplo, [Batería > 20%]).
- Acción: Código ejecutado durante la transición (por ejemplo, Registrar Error, Reiniciar Sensor).
3. Eventos y señales (📡)
Los eventos son ocurrencias que desencadenan transiciones. En robótica, estos provienen a menudo de:
- Entradas de sensores (LiDAR, cámaras, tacto).
- Temporizadores internos (tiempos de espera).
- Comandos externos (interfaz de usuario, control remoto).
🛠️ Diseñando un controlador de robot: Paso a paso
Vamos a recorrer el diseño de una máquina de estados para un robot móvil autónomo encargado de patrullar un almacén. No utilizaremos ningún software de dibujo; definiremos la lógica conceptualmente y luego la estructuraremos.
Paso 1: Definir el punto de entrada
Cada programa comienza en algún lugar. Para un robot, esto suele ser elSecuencia de arranque. Durante este estado, el sistema inicializa el hardware, verifica las conexiones y carga los archivos de configuración.
Paso 2: Identificar los estados operativos principales
Una vez arrancado, ¿cuáles son los modos principales? Considere lo siguiente:
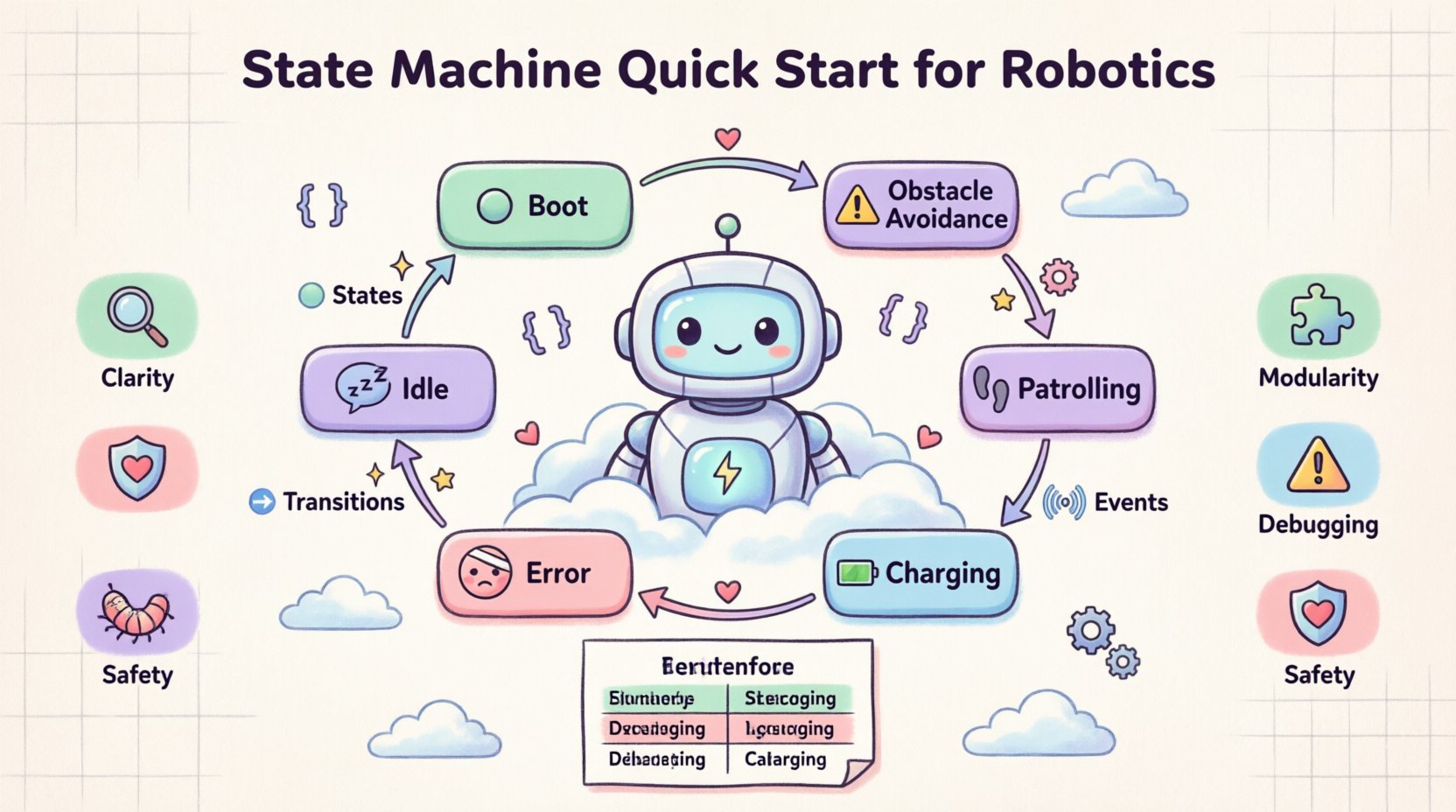
- Inactivo:El robot está en reposo, esperando una orden.
- Patrullando:El robot se mueve a lo largo de una ruta predefinida.
- Evitación de obstáculos:El robot detecta un objeto y se desvía para evitarlo.
- Cargando:El robot regresa a un muelle para recargarse.
- Error:Se detectó un fallo del sistema; el robot se detiene.
Paso 3: Mapear las transiciones
Conecte los estados según el flujo lógico. Por ejemplo:
- Desde Inactivo:Transición a Patrullandocuando Comando de inicioes recibido.
- Desde Patrullando:Transición a Evitación de obstáculos cuando Sensor de proximidad activa.
- Desde Evitación de obstáculos: Transición de vuelta a Patrullaje cuando Camino despejado.
- Desde cualquier estado: Transición a Cargando cuando Batería baja.
- Desde cualquier estado: Transición a Error cuando Fallas del sistema.
📊 Tabla de transición de estados
Una tabla puede complementar un diagrama para definir la lógica con precisión. Esto suele ser más fácil de leer que un diagrama visual complejo para sistemas simples.
| Estado actual | Evento / Condición | Siguiente estado | Acciones |
|---|---|---|---|
| Inactivo | Comando de inicio | Patrullando | Inicializar ruta, habilitar motores |
| Patrullando | Obstáculo detectado | Evitar obstáculo | Detenerse, escanear, rotar |
| Evitar obstáculo | Ruta despejada | Patrullando | Reanudar ruta |
| Patrullando | Batería < 20% | Cargando | Detenerse, localizar puerto, acoplarse |
| Cargando | Batería > 90% | Inactivo | Desconectar, regresar al inicio |
| Cualquier estado | Parada de emergencia | Error | Cortar alimentación a los motores, registrar evento |
🔄 Manejo de lógica compleja con estados jerárquicos
Los robots del mundo real a menudo tienen lógica anidada. Un estado único puede contener múltiples subestados. Esto se conoce como Máquinas de estado jerárquicas.
Ejemplo: Estado de navegación
El Patrullandoestado puede ser un estado compuesto. Dentro de él, podrías tener:
- Sub-estado: Avanzando: El robot avanza en línea recta.
- Sub-estado: Girando: El robot ajusta la dirección.
- Sub-estado: Deteniéndose: El robot frena.
Cuando el robot está en Patrullando, técnicamente también está en uno de estos sub-estados. Esto le permite definir comportamientos comunes para el estado padre mientras mantiene detalles específicos en los estados hijos.
⚠️ Manejo de errores y estados de seguridad
La robótica requiere una gestión robusta de errores. Siempre debe tener un estado dedicado para fallas. Esto garantiza que el sistema no se quede en un estado defectuoso de forma indefinida.
Consideraciones clave de seguridad
- Aislamiento: Un estado de error debe impedir la ejecución de comandos de movimiento.
- Visibilidad: El estado debe activar una alerta (LED, sonido, registro).
- Recuperación: Defina si el sistema puede recuperarse automáticamente o requiere intervención humana.
- Tiempo de espera: Si una transición tarda demasiado, fuerce una transición a un estado de error.
Ejemplo: Tiempo de espera del motor
Si el robot intenta moverse pero el codificador no registra movimiento durante 5 segundos:
- Disparador:Evento de tiempo de espera.
- Transición: Desde Patrullando a Error.
- Acción: Establecer bandera Carraca del motor.
🧪 Depuración y prueba de lógica de estado
Una vez que se dibuja el diagrama, ¿cómo verificas que funciona? No necesitas un IDE específico para probar la lógica primero en papel.
1. Simulación de recorrido
Toma un bolígrafo y traza caminos en tu diagrama. Actúa como si fueras el robot. Pregúntate:
- ¿Puedo alcanzar cada estado?
- ¿Hay estados de los que no puedo salir (bloqueos)?
- ¿Qué pasa si dos eventos ocurren al mismo tiempo?
2. Análisis de cobertura
Asegúrate de que cada estado tenga al menos una transición entrante y una saliente (excepto el inicio y el final). Esto evita que el robot se quede atrapado.
3. Prueba de casos extremos
Considera escenarios que no están en el flujo principal:
- Pérdida de alimentación durante una transición.
- Ruido del sensor (conmutación rápida de eventos).
- Eventos de alta prioridad simultáneos.
🚀 Patrones comunes en robótica
Varios patrones aparecen con frecuencia en las máquinas de estado robóticas. Reconocerlos puede acelerar tu proceso de diseño.
El temporizador de supervisión
Un temporizador que se reinicia solo si el sistema funciona correctamente. Si el temporizador expira, fuerza una transición a un estado seguro (como Reinicio).
El estado de reserva
Un estado genérico utilizado cuando no se cumplen condiciones específicas. Por ejemplo, si un algoritmo de navegación falla, el robot entra en un Buscando la casa estado en lugar de fallar.
Estados preemtivos
Estados que interrumpen a otros. El Parada de emergencia el estado es el estado preventivo definitivo. Sobrescribe Patrullando, Cargando, o Inactivo inmediatamente.
🛠️ Mejores prácticas para diagramar
Siga estas directrices para mantener sus diagramas mantenibles y claros.
1. Mantenga los estados atómicos
Evite hacer que los estados sean demasiado complejos. Si un estado contiene demasiada lógica, divídalo en subestados más pequeños. Un estado debe representar qué lo que está haciendo el robot, no cómo lo hace en detalle.
2. Use nombres claros
Los nombres deben ser descriptivos. Evite nombres genéricos como Estado 1. Use Esperando el puerto de acoplamiento en lugar de Esperando.
3. Limitar las transiciones
Demasiadas líneas que se cruzan hacen que un diagrama sea ilegible. Si un estado tiene demasiadas transiciones, considere agruparlas o usar un estado compuesto.
4. Documentar las condiciones de guardia
Escriba siempre la condición exacta para una transición. No escriba simplemente “Error”; escriba “[Bandera de Error == Verdadero]”.
5. Control de versiones
Aunque no estés utilizando software, trata tus diagramas como código. Mantén versiones. Si cambias la lógica, anota qué cambió y por qué.
🔄 Concurrencia en robótica
Algunos robots realizan múltiples tareas simultáneamente. Mientras que las máquinas de estado básicas son secuenciales, los diseños avanzados manejan la concurrencia. Esto significa que el robot puede estar en múltiples estados al mismo tiempo.
Ejemplo: Monitoreo y movimiento
Un robot podría estar Patrullando mientras simultáneamente Monitoreando sensores. En un diagrama, esto a menudo se representa mediante regiones paralelas.
- Región 1: Control de movimiento (Patrullaje, detención).
- Región 2: Monitoreo de sensores (Escuchando, escaneando).
Los cambios en la Región 2 no necesariamente detienen la Región 1. Esto añade complejidad al diagrama, pero es necesario para la autonomía avanzada.
🧩 Integración con código
¿Cómo conviertes este diagrama en software funcional? El diagrama sirve como especificación.
1. Enumeraciones
Asigna cada estado a una enumeración en tu código. Esto evita errores tipográficos en los nombres de estado.
2. Sentencias Switch/Caso
Utiliza la variable de estado para cambiar entre diferentes bloques de lógica. Esto refleja la estructura visual del diagrama.
3. Colas de eventos
Los eventos deben almacenarse en una cola. El bucle principal procesa un evento a la vez, desencadenando la transición adecuada según el estado actual.
📈 Escalando tu lógica
A medida que crezca tu proyecto de robot, la máquina de estados también crecerá. Es posible que necesites refactorizar tu diagrama.
- Modularización: Extrae comportamientos comunes en máquinas de estado separadas que puedan reutilizarse en diferentes robots.
- Abstracción: Oculta los detalles de bajo nivel. La máquina de estados de alto nivel debe encargarse de Mover, noVelocidad del motor.
- Ciclos de revisión: Revise regularmente el diagrama con tu equipo para asegurarte de que coincida con la implementación actual.
🔧 Solución de problemas comunes
Incluso con un buen diagrama, surgen problemas de implementación.
Problema: Condición de carrera
Si dos eventos ocurren casi al mismo tiempo, el robot podría reaccionar de forma impredecible. Usa una cola de eventos para asegurar un orden estricto de procesamiento.
Problema: Bucles infinitos
Una máquina de estados podría buclearse entre dos estados sin realizar trabajo. Asegúrate de que las transiciones tengan condiciones de guarda que finalmente se vuelvan verdaderas.
Problema: Desincronización de estados
El código podría estar en un estado diferente al que sugiere el diagrama. Agrega registro en los puntos de entrada y salida de cada estado para verificar la sincronización.
🎓 Resumen de los puntos clave
Diseñar una máquina de estados para robótica se trata de claridad y control. Te obliga a pensar en cada condición posible antes de escribir código.
- Comienza con una definición clara de estados y eventos.
- Usa diagramas para visualizar el flujo antes de programar.
- Maneja los errores explícitamente con estados dedicados.
- Mantén los estados simples y atómicos.
- Prueba la lógica en papel antes de la implementación.
- Usa tablas para complementar transiciones complejas.
Al dominar la estructura de los diagramas de máquinas de estados, construyes una base para sistemas robóticos robustos y confiables. Este enfoque reduce los errores y hace que el mantenimiento sea significativamente más fácil para actualizaciones futuras.
