











En el dominio de los sistemas embebidos y la robótica autónoma, gestionar un comportamiento complejo requiere más que simples declaraciones condicionales. Un diagrama de máquina de estados bien definido ofrece un enfoque estructurado para modelar el comportamiento dinámico de un sistema. Esta guía presenta un estudio de caso completo centrado en el diseño de la lógica de control para un dron autónomo utilizando principios de máquinas de estados UML. Exploraremos cómo definir estados, gestionar transiciones, manejar eventos y garantizar una operación robusta bajo las restricciones del mundo real.
Entendiendo los diagramas de máquinas de estado en UML 📐
Un diagrama de máquina de estados, a menudo denominado diagrama de gráficos de estado en UML 2.0, representa los estados discretos de un objeto o sistema y las transiciones entre esos estados. A diferencia de un diagrama de clases estático, este modelo captura el comportamiento temporal del sistema. Es especialmente útil para sistemas reactivos en los que la salida depende del estado actual y de los eventos entrantes.
Los componentes clave incluyen:
- Estado:Una condición o situación durante la vida de un objeto durante la cual satisface alguna condición, realiza alguna actividad o espera algún evento.
- Transición:Una relación entre dos estados que indica que los objetos en el primer estado pasarán al segundo estado cuando ocurra un evento específico y se cumplan ciertas condiciones.
- Evento:Una ocurrencia significativa, como la recepción de una señal, el transcurso de un tiempo o una excepción, que desencadena una transición.
- Condición de guarda:Una expresión booleana que debe ser verdadera para que ocurra la transición.
- Acción:Un cálculo o actividad realizada al entrar, salir o durante una transición.
Utilizar esta notación permite a los ingenieros visualizar el flujo de control sin perderse en la sintaxis del código. Sirve como plano de construcción para la implementación, asegurando que se tengan en cuenta todos los comportamientos posibles del sistema antes de escribir una sola línea de código ejecutable.
El estudio de caso: Dron de entrega autónomo 🚁
Considere un dron cuadricóptero diseñado para la entrega de paquetes en la última milla en un entorno urbano. Este sistema debe operar de forma autónoma, pero requiere supervisión humana para eventos críticos específicos. El dron está equipado con GPS, sistemas de gestión de batería, sensores de evitación de obstáculos y un módulo de comunicación. La lógica de control debe manejar operaciones normales, navegación y diversos modos de fallo.
El desafío de diseño consiste en garantizar que el dron no intente despegar con batería baja, no pierda la conexión sin regresar a casa y aterrice de forma segura en caso de emergencia. Un script lineal sería difícil de mantener y propenso a condiciones de carrera. Una máquina de estados proporciona una jerarquía clara de operaciones.
Definiendo los estados principales ⚙️
El primer paso en el proceso de diseño consiste en identificar los modos de operación distintos. Para este dron, definimos los siguientes estados principales. Cada estado representa una fase específica de la misión.
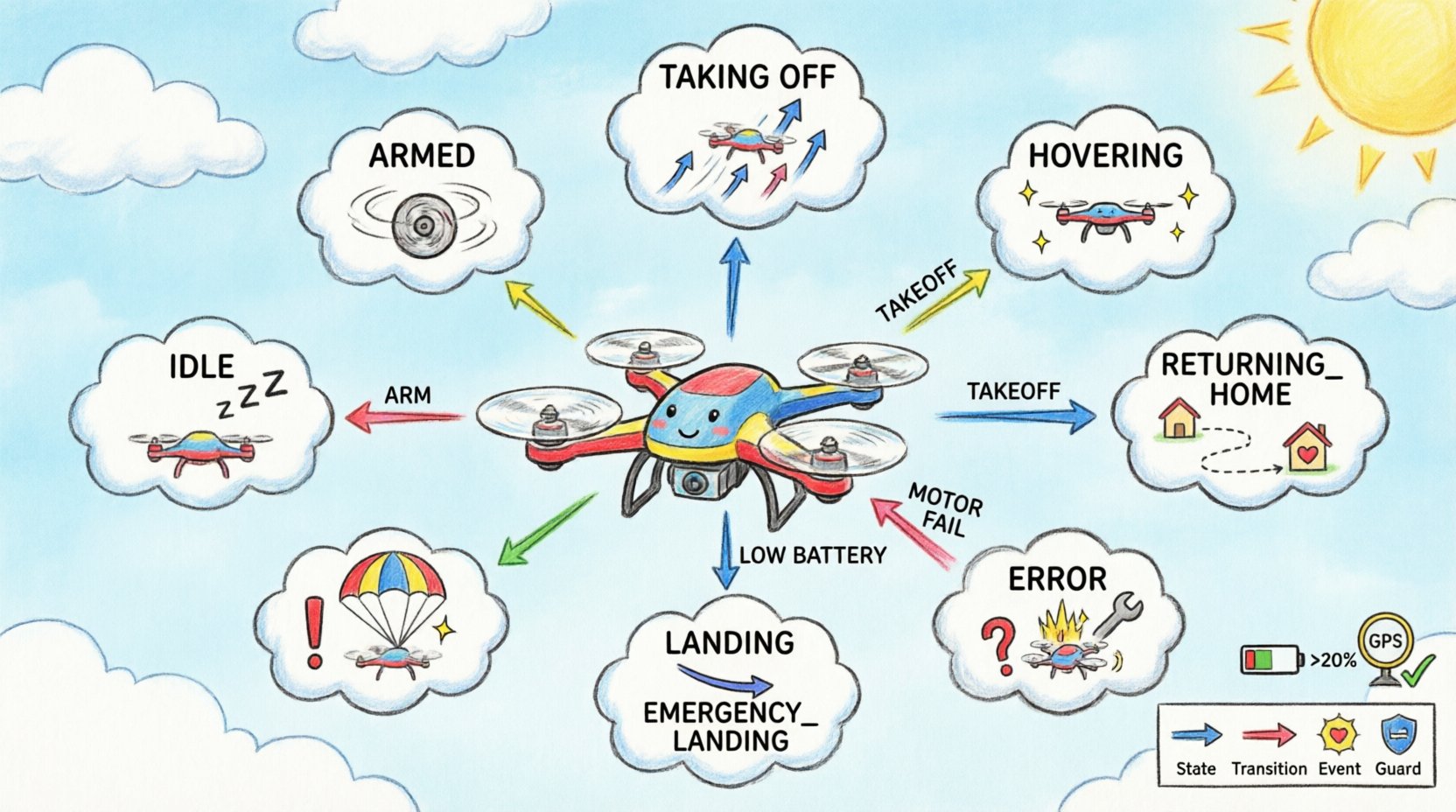
- IDLE:El dron está encendido pero no armado. Espera una orden para comenzar la misión.
- ARMADO:Los motores están girando y el dron está listo para despegar. Aún no está en el aire.
- DESPEGANDO:El dron está ascendiendo desde el suelo hasta una altitud estable de suspensión.
- SUSPENDIDO:El dron está estacionario en el aire, manteniendo su posición.
- Navegando: El dron se está moviendo activamente entre puntos de ruta para entregar la carga.
- REGRESANDO A CASA: El dron está volviendo al lugar de lanzamiento debido a batería baja o pérdida de señal.
- ATERRIZANDO: El dron está descendiendo desde el aire hasta el suelo.
- ATERRIZAJE DE EMERGENCIA: Una descenso inmediato y forzado debido a un fallo crítico (por ejemplo, fallo del motor).
- ERROR: Un estado general para fallos no manejados o reinicios del sistema.
Observe que los estados como INACTIVO y ERROR son terminales o cuasi-terminales. Una vez que el sistema entra en ERROR, no puede continuar a NAVEGANDO sin un reinicio manual. Esto evita que el dron intente volar mientras se encuentra en un estado de fallo.
Lógica de transición y desencadenadores de eventos 📡
Las transiciones definen cómo el sistema se mueve entre los estados enumerados anteriormente. Estos movimientos se desencadenan por eventos como entradas del usuario, lecturas de sensores o temporizadores internos. La tabla a continuación describe las transiciones críticas necesarias para la lógica de control.
| Evento | Estado de origen | Estado objetivo | Condición de guarda |
|---|---|---|---|
| COMANDO_DE_ARMADO | INACTIVO | ARMADO | Batería > 20% |
| DESPEGUE_COMPLETADO | ARMADO | DESPEGANDO | Sensor de Altitud Activo |
| ALCANZAR SUSPENSIÓN | DESPEGANDO | SUSPENSIÓN | Altitud = 1.5m |
| INICIAR MISIÓN | SUSPENSIÓN | NAVEGANDO | Bloqueo de GPS = Verdadero |
| BATERÍA BAJA | NAVEGANDO | REGRESANDO A CASA | Batería < 30% |
| PÉRDIDA DE SEÑAL | NAVEGANDO | REGRESANDO A CASA | Tiempo > 5s sin señal |
| ALCANZAR CASA | REGRESANDO A CASA | ATERRIZANDO | Distancia = 0m |
| TOQUE DE TIERRA | ATERRIZANDO | INACTIVO | Altitud = 0m |
| FALLA DEL MOTOR | Cualquiera | ATERRIZAJE DE EMERGENCIA | Corriente < 0A |
Observe que el FALLA_MOTORevento tiene un estado de origen de Cualquiera. Esto se conoce como una transición ortogonal o una interrupción. Independientemente de si el dron está INACTIVO o NAVEGANDO, una falla crítica del motor obliga a un cambio inmediato de estado a ATERRIZAJE_EMERGENCIA. Esto asegura que la seguridad tenga prioridad sobre la continuidad de la misión.
Condiciones de guardia y acciones 🛑
Las transiciones no siempre son incondicionales. Las condiciones de guardia actúan como comprobaciones de seguridad. Por ejemplo, un usuario no puede iniciar una secuencia de despegue si la batería está críticamente baja. La condición de guardia Batería > 20%evita la transición desde INACTIVO a ARMADO.
Además, las transiciones a menudo desencadenan acciones. Estas acciones se ejecutan cuando ocurre la transición o mientras se está en un estado específico.
- Acción de entrada:Código ejecutado inmediatamente al entrar en un estado. Para el estado DESPEGANDOestado, una acción de entrada podría ser establecer el empuje del motor al 60% e inicializar el controlador PID de altitud.
- Acción de salida:Código ejecutado inmediatamente al salir de un estado. Al salir del estado SUSPENDIDO, el sistema podría detener el seguidor de puntos de ruta para evitar comandos conflictivos.
- Actividad de ejecución:Código ejecutado continuamente mientras se está en un estado. En el estado NAVEGANDO estado, un Hagala actividad implica leer continuamente datos del GPS y ajustar las velocidades de los motores para mantener la trayectoria de vuelo.
Considere el REGRESANDO_A_DOMICILIOestado. Al entrar, el dron debe calcular el vector de regreso al punto de origen. Al salir, debe eliminar el vector de retorno. Esto asegura que si el dron vuelve a cambiar a NAVEGANDO (quizás porque el usuario recuperó el control), la lógica de retorno no interfiera con la lógica de la misión.
Diseño de Estados Jerárquicos (Estados Compuestos) 🏗️
Las máquinas de estados planas pueden volverse difíciles de manejar a medida que crece la complejidad. Las máquinas de estados jerárquicas permiten que los estados contengan subestados. Esto es particularmente útil para el NAVEGANDOestado. La navegación no es una sola acción; es una colección de comportamientos.
Podemos definir NAVEGANDOcomo un estado compuesto con los siguientes subestados internos:
- SEGUIMIENTO_DE_PUNTOS_DE_RUTA:El modo estándar en el que el dron se mueve entre puntos.
- EVITACIÓN_DE_COLISIONES:Un estado al que se ingresa cuando se detecta un obstáculo.
- ESTABILIZACIÓN:Un estado de bajo nivel que gestiona el equilibrio de los motores durante ráfagas de viento.
Las transiciones entre estos subestados ocurren sin salir del estado padre NAVEGANDOestado. Por ejemplo, si se detecta un obstáculo, el sistema pasa de SEGUIMIENTO_DE_PUNTOS_DE_RUTAa EVITACIÓN_DE_COLISIONES. El estado padre permanece activo, preservando el contexto general de la misión. Una vez que el obstáculo es eliminado, el sistema vuelve a SEGUIMIENTO_DE_PUNTOS_DE_RUTA.
Esta estructura reduce la redundancia. Las acciones comunes para la navegación, como actualizar los registros de telemetría, pueden definirse en el nivel padre en lugar de repetirlas en cada subestado. También mejora la claridad al agrupar visualmente los comportamientos relacionados.
Consideraciones de implementación para sistemas embebidos 💻
Traducir un diagrama de máquina de estados en código ejecutable requiere atención a las limitaciones del hardware embebido. El controlador de vuelo del dron generalmente se ejecuta en un microcontrolador con memoria RAM y ciclos de CPU limitados.
- Eficiencia de memoria:Evite almacenar todo el historial de estados. Solo rastree el estado actual. Usar una enumeración o entero para representar el estado minimiza el uso de memoria.
- Respuesta en tiempo real:Las transiciones deben ocurrir de forma determinista. Si el EMERGENCY_LANDINGevento se activa, el código no debe esperar a que finalice una tarea de larga duración. Los interrupciones deben manejarse fuera del bucle principal de estados o con alta prioridad.
- Consistencia de estado:Asegúrese de que ningún estado tenga un comportamiento indefinido. Cada evento posible debe tener una transición definida. Si ocurre un evento inesperado, el sistema debe pasar a un estado de ERRORestado en lugar de fallar o colgarse.
- Registro:Implemente un mecanismo de registro de estados. Cuando ocurre una transición, escriba la marca de tiempo, el estado de origen, el estado de destino y el evento en memoria no volátil. Esto es crucial para el análisis posterior al vuelo.
Por ejemplo, al implementar el estado de TAKING_OFFestado, el código no debe bloquearse. Debe usar un temporizador no bloqueante para monitorear la altitud. Si la altitud no aumenta dentro de un tiempo establecido, debe activar un evento de tiempo agotado y pasar a ERROR.
Estrategias de prueba y verificación 🧪
Antes de desplegar el dron, la lógica de la máquina de estados debe verificarse. La simulación es el método más rentable. Al crear un simulador de software que imite las entradas de los sensores, los ingenieros pueden probar cada posible camino a través del diagrama de estados sin arriesgar el hardware.
Las actividades clave de prueba incluyen:
- Prueba de límites:Pruebe las transiciones que dependen de umbrales específicos. Por ejemplo, verifique que la transición a RETURNING_HOMEocurre exactamente cuando la batería baja por debajo del 30%, y no al 29% ni al 31%.
- Cobertura de caminos:Asegúrese de que cada línea de transición en el diagrama se recorra al menos una vez durante la prueba. Esto confirma que la lógica para cada evento es funcional.
- Prueba de interrupción: Simule eventos que deberían interrumpir el estado actual. Verifique que el sistema salga correctamente NAVEGANDO y entra en ATERRIZAJE_DE_EMERGENCIA incluso si se está ejecutando un cálculo largo.
- Prueba de reinicio: Verifique que el sistema pueda recuperarse del estado ERROR estado. ¿Puede reiniciarse manualmente a IDLE sin un ciclo de alimentación física?
También se pueden utilizar herramientas de verificación de modelos. Estas herramientas verifican matemáticamente que la máquina de estados no contenga bloqueos (estados en los que no hay transiciones posibles) ni estados inalcanzables (estados que no se pueden alcanzar desde el estado inicial).
Errores comunes que deben evitarse ⚠️
Aunque se cuente con un diagrama bien diseñado, pueden ocurrir errores de implementación. A continuación se presentan problemas comunes observados en sistemas de control de drones.
- Transiciones faltantes: Es fácil olvidar una transición para un evento específico. Por ejemplo, ¿qué ocurre si la batería se agota mientras se está en ATERRIZAJE_DE_EMERGENCIA? El dron aún debe ejecutar una caída controlada o lógica de protección contra caída libre.
- Confusión de estados: Usar demasiados estados similares. Por ejemplo, tener tanto SUSPENSIÓN como ESPERANDO puede ser confuso. Agrúpelos si sus comportamientos son idénticos.
- Operaciones bloqueantes: No utilice código bloqueante dentro de una acción de estado. Si una acción espera un sensor, toda la máquina de estados se congela. Use devoluciones asincrónicas o banderas en su lugar.
- Bucles no deseados: Asegúrese de que no existan bucles infinitos de estados que consuman ciclos de CPU sin realizar trabajo útil. Por ejemplo, un bucle entre ERROR y INACTIVO sin un comando de reinicio provocará un cierre abrupto.
Resumen de Beneficios 🏆
Diseñar un sistema de control de drones utilizando un diagrama de máquina de estados ofrece ventajas significativas frente a la programación procedural tradicional. Impone una separación clara de responsabilidades, haciendo que el código sea más fácil de leer y depurar. Al definir explícitamente estados y transiciones, los desarrolladores garantizan que el sistema se comporte de manera predecible en todas las situaciones.
Este enfoque facilita la colaboración entre los equipos de hardware y software. El diagrama sirve como un lenguaje compartido. Los ingenieros de hardware pueden ver exactamente cuándo se consultan los sensores, y los ingenieros de software pueden ver cuándo se ordenan los actuadores. También simplifica la incorporación de nuevos miembros del equipo, ya que la lógica se visualiza en lugar de estar oculta en estructuras de código complejas.
En última instancia, la inversión en diseñar una máquina de estados robusta se traduce en fiabilidad. Un dron autónomo es un sistema complejo, y gestionar su comportamiento requiere un enfoque disciplinado. Al adherirse a las normas UML y planificar cuidadosamente las transiciones, condiciones y acciones, los ingenieros pueden construir sistemas que sean seguros, mantenibles y eficientes. Este estudio de caso demuestra que, aunque la lógica es compleja, la estructura proporciona claridad y control sobre el comportamiento autónomo.
