











Die Gestaltung der Steuerlogik für autonome Systeme erfordert Präzision. Wenn Ingenieure von der Konzeption zur Umsetzung übergehen, dient das Unified Modeling Language (UML)-Zustandsmaschinen-Diagramm oft als Bauplan. Ein Missverhältnis zwischen dem Diagramm und dem tatsächlichen Code kann jedoch katastrophale Ausfälle in robotischen Umgebungen verursachen. Ein Roboter, der zögert, wenn er sich bewegen sollte, oder einer, der in eine endlose Schleife bei einer einfachen Aufgabe gerät, stammt oft aus grundlegenden Fehlern in der Zustandsmaschinen-Architektur.
Die Entwicklung zuverlässiger eingebetteter Software erfordert mehr als nur das Zeichnen von Kästchen und Pfeilen. Es erfordert ein tiefes Verständnis für Ablaufsteuerung, Zeitplanung und Ressourcenmanagement. Dieser Leitfaden untersucht die spezifischen Fallen, die robotische Zustandsmaschinen beeinträchtigen. Durch die Identifizierung dieser strukturellen Schwächen können Entwickler sicherstellen, dass ihre Systeme die Stabilität aufweisen, die für die praktische Anwendung erforderlich ist.
1. 🚫 Der fehlende Anfangszustand
Die Grundlage jeder endlichen Zustandsmaschine (FSM) ist der Anfangszustand. Dies ist der Einstiegspunkt, an dem das System seine Operation nach dem Einschalten oder Zurücksetzen beginnt. Ein häufiger Fehler beim Zeichnen von Diagrammen besteht darin, diesen Startpunkt zu übersehen oder ihn mehrdeutig zu lassen.
Wenn Code aus einem Diagramm generiert wird, das keinen definierten Einstiegspunkt enthält, verwendet die Laufzeitumgebung oft einen beliebigen Zustand als Standard. Im robotischen Kontext bedeutet dies, dass der Roboter möglicherweise in einem „Bewegungs“-Zustand startet, obwohl er sich im „Ruhestatus“ befinden sollte. Dies kann sofortige Aktivierung der Antriebe verursachen und zu Sicherheitsrisiken führen.
- Undefinierter Start: Der Code geht davon aus, dass ein Zustand existiert, ohne zu überprüfen, ob er der richtige Einstiegspunkt ist.
- Probleme beim Stromzyklus: Beim Neustart kann der Roboter Daten aus der vorherigen Sitzung behalten, aber die Steuerlogik nicht zurücksetzen.
- Initialisierungslogik: Ohne einen speziellen Anfangszustand sind Initialisierungssequenzen oft über mehrere Übergangsfunktionen verteilt.
Jede robuste Zustandsmaschine muss die Einstiegbedingung explizit definieren. Dadurch wird sichergestellt, dass Sensoren kalibriert sind, Aktuatoren gebremst sind und der Logik-Controller bereit ist, bevor der Roboter externe Befehle annimmt.
2. ⏸️ Totenlücken und fehlende Übergänge
Eine Totenlücke tritt auf, wenn ein System in einen Zustand gelangt, aus dem keine Übergänge möglich sind. In einem Diagramm sieht das aus wie ein Kästchen ohne ausgehende Pfeile. Im Code äußert sich das als Hängenbleiben oder Einfrieren.
Roboter arbeiten in dynamischen Umgebungen. Wenn ein Sensor keine Daten meldet, darf der Roboter nicht unbegrenzt anhalten. Eine Zustandsmaschine, die auf eine Bedingung wartet, die niemals eintreten wird, erzeugt eine Totenlücke. Dies ist besonders gefährlich bei Navigationstasks, bei denen ein Roboter möglicherweise auf einen freien Pfad wartet, der durch ein Hindernis blockiert ist.
Häufige Ursachen für Totenlücken sind:
- Unerreichbare Zustände: Zustände, die im Diagramm definiert sind, aber niemals mit dem Hauptfluss verbunden sind.
- Fehlende Standardübergänge: Das Versäumnis, einen „Alles-erfassenden“ Übergang für unerwartete Eingaben zu definieren.
- Logische Widersprüche: Wächterbedingungen, die sich gegenseitig ausschließen, sodass kein Weg weiterführt.
Um dies zu verhindern, sollte jeder Zustand einen definierten Ausgangspfad haben. Wenn die erwartete Bedingung innerhalb eines bestimmten Zeitraums nicht erfüllt ist, sollte das System in einen Timeout- oder Fehlerzustand wechseln, anstatt für immer zu warten.
3. 🔄 Fehlende Handhabung der Konkurrenz
Roboter führen oft mehrere Aufgaben gleichzeitig aus. Ein Drohne könnte beispielsweise ihre Flugstabilität gewährleisten, während sie nach Hindernissen sucht. Eine einfache sequenzielle Zustandsmaschine kann dies nicht bewältigen. Ingenieure versuchen manchmal, Konkurrenz durch Verschachtelung von Zuständen zu modellieren, was jedoch oft zu komplexer, schwer zu wartender Logik führt.
Echte Konkurrenz erfordert parallele Regionen innerhalb der Zustandsmaschine. Wenn ein Diagramm einen einzigen Fluss für parallele Aufgaben zeigt, führt der resultierende Code diese wahrscheinlich nacheinander aus. Dies führt zu Latenz, die für Hochgeschwindigkeits-Steuerungsschleifen unakzeptabel sein kann.
- Interleaved Ausführung:Die sequenzielle Verarbeitung paralleler Aufgaben verursacht Verzögerungen bei kritischen Operationen.
- Ressourcenkonflikte: Mehrere Zustände versuchen, gleichzeitig auf dieselbe Hardware-Ressource zuzugreifen, ohne Synchronisation.
- Zustandsexplosion:Das Versuch, jede Kombination paralleler Aufgaben zu modellieren, führt zu einer kombinatorischen Explosion der Zustände.
Eine korrekte Modellierung erfordert die Identifizierung unabhängiger Aktivitäten und ihre Zuweisung zu unterschiedlichen parallelen Bereichen. Dadurch kann die Laufzeit sie effizient planen, ohne sich gegenseitig zu blockieren.
4. 🛑 Zu komplexe Wächterbedingungen
Wächterbedingungen sind logische Ausdrücke, die bestimmen, ob ein Übergang stattfinden kann. Obwohl sie für die Steuerung unverzichtbar sind, macht ihre Überkomplexität den Logikfluss unsichtbar. Ein Wächter, der fünf Codezeilen umfasst, ist schwer zu debuggen und zu verifizieren.
In der Robotik liefern Sensoren rauschende Daten. Eine Wächterbedingung, die gleichzeitig auf mehrere Sensorwerte zurückgreift, ist anfällig für Rennbedingungen. Wenn ein Sensor leicht vor einem anderen aktualisiert wird, könnte die Logik anders ausgewertet werden, als beabsichtigt.
Komplexe Wächter führen zu:
- Versteckte Abhängigkeiten:Die Reihenfolge der Auswertung ist entscheidend, aber im Diagramm nicht explizit dargestellt.
- Schwierigkeiten beim Debugging:Wenn ein Übergang nicht ausgelöst wird, ist es schwer zu erkennen, welter Teil der Bedingung fehlgeschlagen ist.
- Code-Bloat:Komplexe Logik wird oft über mehrere Übergänge hinweg dupliziert.
Es ist besser, die Wächterbedingungen zu vereinfachen. Verschieben Sie komplexe Logik in die Eingangs- oder Ausgangsaktionen eines Zustands. Dadurch bleiben die Übergänge sauber und das Zustandsdiagramm lesbar. Zum Beispiel: Überprüfen Sie statt bei jedem Übergang den Akkustand nur einmal beim Betreten des Zustands „Niedriger Stromverbrauch“.
5. ⏱️ Ignorieren von Timeouts und Watchdogs
Echtzeit-Systeme erfordern Zeitbewusstsein. Ein Zustandsmaschine, die ausschließlich auf Ereignistrigger angewiesen ist, ist anfällig. Was geschieht, wenn ein Ereignis niemals eintrifft? Der Roboter wartet unendlich lange.
Das Implementieren von Timeouts ist entscheidend für die Robustheit. Jeder Zustand sollte eine maximale Dauer haben, während der er aktiv bleiben darf. Wenn die Übergangsbedingung nicht erfüllt ist, löst ein Timer einen Fallback-Zustand aus.
- Hardware-Watchdogs:Externe Mechanismen, die das System zurücksetzen, wenn die Software hängt.
- Interne Timer:Logik innerhalb der Zustandsmaschine, um Zeitbegrenzungen für bestimmte Zustände durchzusetzen.
- Herzschlag-Signale:Sicherstellen, dass die Steuerungsschleife aktiv ist und reagiert.
Ohne Timeouts kann ein vorübergehender Sensor-Fehler einen Roboter feststecken lassen. Ein Timeout-Mechanismus stellt sicher, dass das System reibungslos wiederhergestellt wird und versucht, sich zurückzusetzen oder in einen sicheren Modus zu wechseln.
6. 🚨 Fehlende Fehlerwiederherstellungszustände
Viele Diagramme konzentrieren sich nur auf den „glücklichen Pfad“. Sie zeigen, wie der Roboter funktioniert, wenn alles reibungslos verläuft. Selten wird gezeigt, wie sich der Roboter verhält, wenn etwas schiefgeht.
Roboter arbeiten in unstrukturierten Umgebungen. Gelenke können blockieren, Motoren überhitzen oder die Kommunikation kann abbrechen. Ohne explizite Fehlerzustände kann das System abstürzen oder unvorhersehbar reagieren.
Eine robuste Zustandsmaschine beinhaltet:
- Sichere Zustände: Ein festgelegter Zustand, in dem der Roboter alle Bewegungen anhält und auf eine Intervention wartet.
- Wiederherstellungslogik: Maßnahmen, die unternommen werden, um das System automatisch zurückzusetzen.
- Diagnoseausgaben: Protokollieren spezifischer Fehlercodes, um Ingenieuren bei der Identifizierung der Ursache zu helfen.
Das Ignorieren von Fehlerzuständen verlagert die Verantwortung für die Fehlerbehandlung auf die Codegenerierungsebene, die oft nicht über den notwendigen Kontext verfügt, um Randfälle effektiv zu behandeln.
7. 📦 Schlechte Datenübermittlungsmechanismen
Daten fließen über Übergänge durch einen Zustandsautomaten. Wenn ein Roboter von „Anfahren“ zu „Greifen“ wechselt, muss er die Zielkoordinaten übergeben. Wenn im Zustandsautomatendiagramm nicht klar definiert ist, wie Daten übermittelt werden, wird der Code Schwierigkeiten haben.
Häufige Probleme sind:
- Globale Variablen:Die Abhängigkeit von gemeinsamem Speicher ohne Synchronisation führt zu Rennbedingungen.
- Fehlende Parameter:Übergänge, die ohne die notwendige Datenkontextdefinition definiert sind.
- Datenverzögerung:Übergeben von Daten, die zum Zeitpunkt des Zustandswechsels veraltet sind.
Parameter sollten explizit bei Übergängen definiert werden. Dadurch wird sichergestellt, dass der empfangende Zustand genau die Informationen erhält, die er zum Zeitpunkt des Eintritts benötigt. Zudem macht das Diagramm selbst dokumentierend hinsichtlich der Datenabhängigkeiten.
8. 🏷️ Mehrdeutige Zustandsnamenkonventionen
Namenskonventionen in einem Zustandsautomaten sind die primäre Schnittstelle für die Fehlersuche. Vage Namen wie „Zustand 1“ oder „Prozess“ geben keinen Aufschluss über den Status des Systems. Bei einem komplexen Roboter muss ein Ingenieur auf ein Protokoll blicken und sofort erkennen, was das System tut.
Gute Namenskonventionen sollten folgende Merkmale aufweisen:
- Beschreibend:„Wheel_Motor_On“ ist besser als „Run“.
- Konsistent:Verwenden Sie im gesamten Zustandsautomaten die gleiche Verbform und Nomenstruktur.
- Einzigartig:Vermeiden Sie Namen, die ähnlich aussehen, wie beispielsweise „Error“ und „Error_Handler“.
Konsistente Namensgebung verringert die kognitive Belastung beim Durchsehen von Code oder Protokollen. Sie hilft auch automatisierten Werkzeugen, bessere Dokumentation und Testfälle auf Basis des Modells zu generieren.
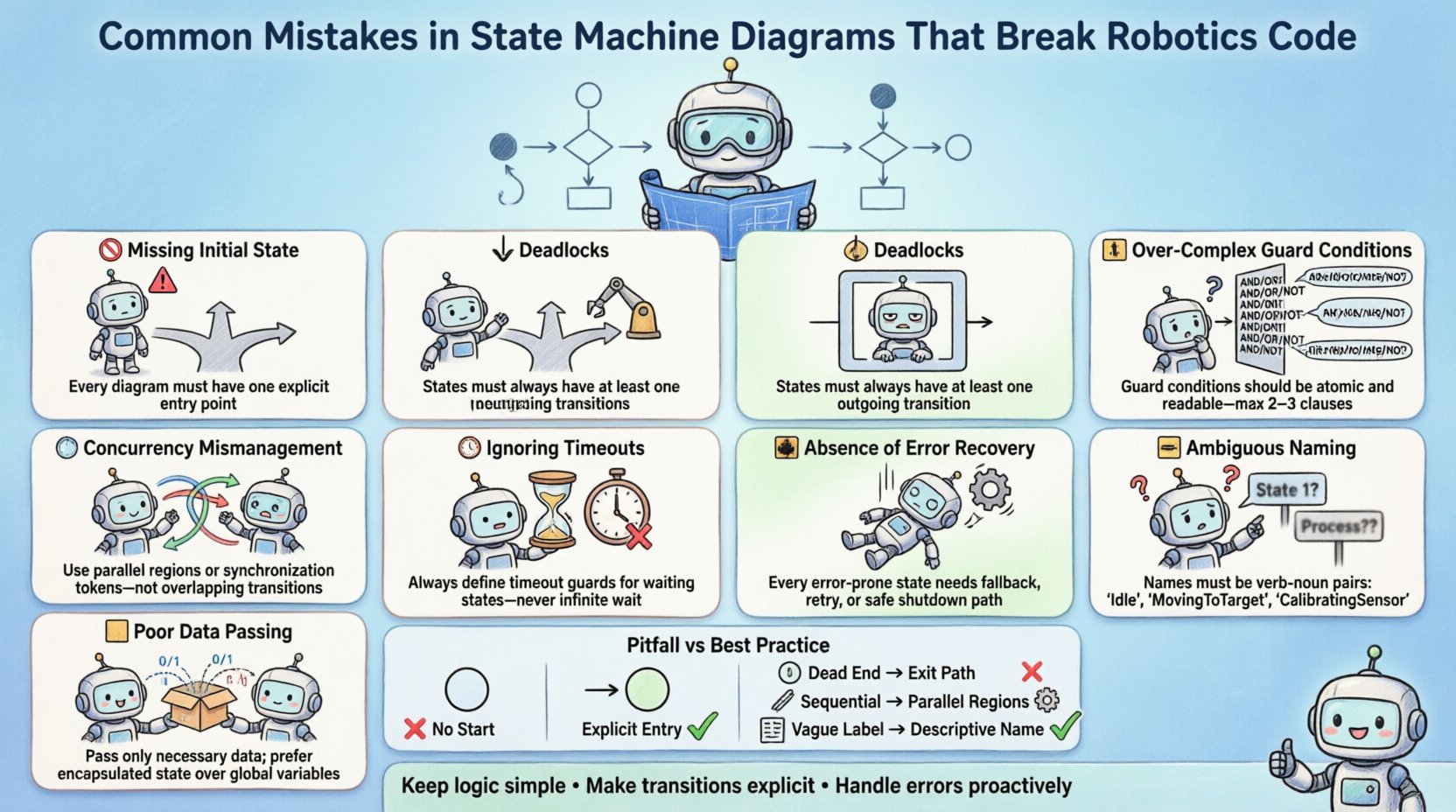
Tabelle: Häufige Fehlerquellen im Vergleich zu Best Practices
| Bereich | Fehlerquelle | Beste Praxis |
|---|---|---|
| Einstiegspunkt | Kein anfänglicher Zustand definiert | Expliziter Einstiegspunkt mit Initialisierungslogik |
| Flusssteuerung | Verklemmungen aufgrund fehlender Übergänge | Stellen Sie sicher, dass jeder Zustand einen Ausgangspfad hat |
| Parallelität | Sequenzielle Verarbeitung paralleler Aufgaben | Verwenden Sie parallele Bereiche für unabhängige Aktivitäten |
| Logik | Komplexe Wächterbedingungen | Verschieben Sie Logik in Zustandsaktionen, halten Sie Wächter einfach |
| Zeitsteuerung | Keine Zeitüberschreitungen bei wartenden Zuständen | Implementieren Sie Watchdogs und interne Timer |
| Zuverlässigkeit | Fehlende Fehlerzustände | Definieren Sie sichere und Wiederherstellungszustände explizit |
| Daten | Impliziter globaler Datenzugriff | Übergeben Sie Daten explizit über Übergangsparameter |
| Dokumentation | Zweideutige Zustandsnamen | Verwenden Sie beschreibende, konsistente Namenskonventionen |
Implementierungsaspekte
Sobald das Diagramm finalisiert ist, erfordert die Übersetzung in Code Sorgfalt. Das Modell sollte die Implementierung steuern, nicht umgekehrt. Änderungen am Code, um eine Zustandsmaschinen-Beschränkung zu umgehen, führen oft zu technischem Schulden.
Codegeneratoren können helfen, diese Lücke zu schließen. Sie stellen sicher, dass die Laufzeitumgebung genau mit dem Entwurf übereinstimmt. Es ist jedoch riskant, sich ausschließlich auf die Generierung zu verlassen, ohne das zugrundeliegende Logikverständnis zu besitzen. Ingenieure müssen in der Lage sein, den generierten Code zu lesen und zu überprüfen, ob er dem Zweck des Diagramms entspricht.
Testen der Zustandsmaschine
Unit-Tests sind entscheidend. Jeder Zustand und jeder Übergang sollte unabhängig überprüft werden. Integrations-Tests stellen sicher, dass Zustandsänderungen keine Nebenwirkungen in anderen Teilen des Systems verursachen.
- Übergangstest: Stellen Sie sicher, dass bestimmte Eingaben die richtigen Zustandsänderungen auslösen.
- Zustandsüberprüfung:Stellen Sie sicher, dass das System in einem Zustand verbleibt, bis eine gültige Ausgangsbedingung eintritt.
- Stresstests:Führen Sie das System unter Last aus, um Zeitverzögerungsprobleme oder Rennbedingungen zu überprüfen.
Simulationsumgebungen ermöglichen eine sichere Prüfung von Ausfallmodi. Ingenieure können Sensorausfälle oder Kommunikationsverzögerungen einfügen, um zu sehen, wie sich der Zustandsautomat verhält, ohne die Hardware zu gefährden.
Die Kosten schlechter Modellierung
Ein Zustandsautomat im Diagramm zu korrigieren ist kostengünstig. Eine Korrektur im bereitgestellten Code ist dagegen teuer. In der Robotik kann ein Logikfehler physische Schäden am Roboter oder an der Umgebung verursachen. Er kann auch Verletzungen für Bediener bedeuten.
Die Investition von Zeit in einen strengen Entwurfsprozess zahlt sich in Stabilität aus. Ein gut dokumentierter Zustandsautomat dient als einziges Quellensystem für das gesamte Entwicklungsteam. Er ermöglicht eine bessere Zusammenarbeit zwischen Hardware- und Softwareingenieuren.
Zusammenfassung der wichtigsten Erkenntnisse
Die Entwicklung zuverlässiger Robotik-Software beginnt mit einem soliden Modell. Die Vermeidung verbreiteter Fehler wie fehlender Anfangszustände, Deadlocks und schlechter Konkurrenzhandhabung ist entscheidend. Robuste Fehlerbehandlung und klare Datenübertragungsmechanismen stellen sicher, dass das System aus unerwarteten Zuständen wiederhergestellt werden kann.
Durch Einhaltung dieser Prinzipien können Entwickler Zustandsautomaten erstellen, die nicht nur funktional, sondern auch widerstandsfähig sind. Der Unterschied zwischen einem Prototyp und einem Produkt liegt oft in der Qualität der Steuerlogik. Sorgfalt in der Entwurfsphase verhindert Probleme im Einsatz.
Halten Sie die Logik einfach. Machen Sie die Übergänge deutlich. Beheben Sie Fehler proaktiv. Diese Praktiken bilden die Grundlage zuverlässiger robotischer Systeme.
