











自律システムの制御論理を設計するには正確さが求められます。エンジニアがコンセプトから実装へ移行する際、統一モデリング言語(UML)の状態機械図はしばしば設計図として機能します。しかし、図と実際のコードの間に乖離が生じると、ロボット環境で壊滅的な失敗を引き起こすことがあります。動くべき時に猶予してしまうロボット、あるいは簡単なタスク中に無限ループに入ってしまうロボットは、多くの場合、状態機械アーキテクチャにおける根本的な誤りが原因です。
信頼性の高い組み込みソフトウェアを構築するには、箱と矢印を描くこと以上のことが求められます。実行フロー、タイミング、リソース管理に関する深い理解が不可欠です。このガイドでは、ロボットの状態機械を損なう具体的な落とし穴を検証します。これらの構造的弱みを特定することで、開発者は実世界での展開に必要な安定性を備えたシステムを確保できます。
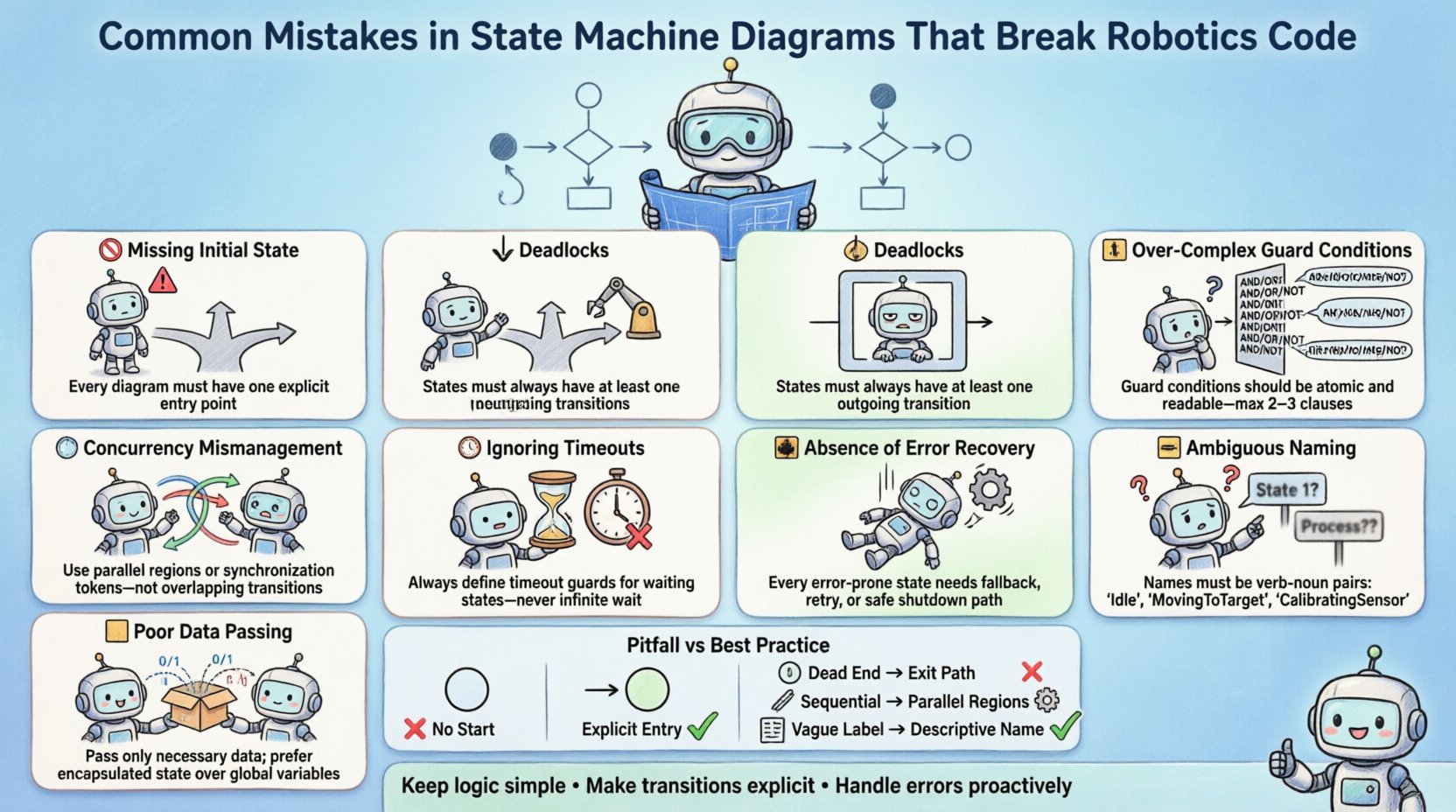
1. 🚫 初期状態の欠如
有限状態機械(FSM)の基盤は初期状態です。これは、システムが電源投入またはリセット時に動作を開始するエントリーポイントです。図示する際の一般的な誤りは、この出発点を省略すること、または曖昧なままにしてしまうことです。
明確なエントリーステートが定義されていない図からコードが生成された場合、実行環境はしばしば任意の状態にデフォルトします。ロボットの文脈では、本来「アイドル」状態にすべきところが「移動中」状態でスタートしてしまう可能性があります。これにより即座にアクチュエータが作動し、安全上の危険を引き起こすことがあります。
- 未定義のスタート: コードは、状態が存在すると仮定しているが、それが正しいエントリーポイントであることを確認していない。
- 電源サイクルの問題: 再起動時に、ロボットは前回のセッションからのデータを保持するが、制御論理をリセットできなくなる。
- 初期化ロジック: 専用の初期状態がなければ、初期化シーケンスが複数の遷移関数に散在してしまうことが多い。
信頼性の高い状態機械は、必ずエントリーコンディションを明示的に定義しなければなりません。これにより、センサーのキャリブレーション、アクチュエータのブレーキ、論理コントローラーの準備が、ロボットが外部コマンドを受け入れる前に確実に行われることが保証されます。
2. ⏸️ デッドロックと欠落した遷移
システムが、どの遷移も可能な状態に入ってしまうとデッドロックが発生します。図では、出力矢印のないボックスのように見えます。コードでは、ハングやフリーズとして現れます。
ロボットは動的な環境で動作します。センサーがデータを報告しなかった場合、ロボットは無期限に停止してはなりません。決して発生しない条件を待つ状態機械はデッドロックを引き起こします。障害物によって道が塞がれているにもかかわらず、道が空くのを待つナビゲーションタスクでは、特に危険です。
デッドロックの主な原因には以下が含まれます:
- 到達不可能な状態: 図に定義されているが、メインフローに接続されていない状態。
- デフォルト遷移の欠如: 意外な入力に対して「すべてをカバーする」遷移を定義しないこと。
- 論理的矛盾: 互いに排他的なガード条件により、進むべき道がまったくなくなること。
これを防ぐためには、すべての状態に明確な退出経路を設ける必要があります。期待される条件が特定の時間内に満たされない場合、システムは永遠に待つのではなく、タイムアウト状態またはエラー状態に遷移すべきです。
3. 🔄 同時性の誤管理
ロボットはしばしば複数のタスクを同時に実行します。ドローンは障害物をスキャンしながら飛行を安定化する必要があります。単純な順次状態機械ではこれを処理できません。エンジニアの多くは、状態をネストすることで同時性をモデル化しようとしますが、これにより複雑で保守が難しい論理が生じることが多いです。
真の同時性は、状態機械内に並列領域を設ける必要があります。図に並列タスクに対して単一のフローを示す場合、生成されるコードはそれらを順次実行する可能性が高く、高速制御ループでは許容できない遅延を引き起こします。
- インタリーブ実行: 並列タスクを順次処理することで、重要な操作に遅延が生じる。
- リソース競合: 同じハードウェアリソースを同時にアクセスしようとする複数の状態が、同期なしでアクセスしようとしている。
- 状態爆発:並列タスクのすべての組み合わせをモデル化しようとするとうまくいかず、状態の組み合わせ爆発が起こる。
適切なモデル化では、独立した活動を特定し、それらを別々の並列領域に割り当てる。これにより、実行時に相互にブロッキングされずに効率的にスケジューリングできる。
4. 🛑 過度に複雑なガード条件
ガード条件は、遷移が発生するかどうかを決定する論理式である。制御には不可欠だが、あまりに複雑にすると論理の流れが不明瞭になる。5行にわたるガードはデバッグや検証が困難である。
ロボット工学では、センサーからノイズの多いデータが得られる。複数のセンサー読み取りを同時に依存するガード条件は、レースコンディションを引き起こしやすい。1つのセンサーがもう1つよりわずかに早く更新された場合、想定と異なる評価結果になる可能性がある。
複雑なガードは以下の問題を引き起こす:
- 隠れた依存関係:評価の順序が重要だが、図では明示されていない。
- デバッグの困難さ:遷移が発火しなかった場合、条件のどの部分が失敗したかを特定するのが難しい。
- コードの肥大化:複雑な論理は複数の遷移に重複して記述されることが多い。
ガード条件を簡素化することが望ましい。複雑な論理は状態のエントリまたはエグジットアクションに移動する。これにより、遷移は簡潔に保たれ、状態図も読みやすくなる。たとえば、すべての遷移でバッテリー残量をチェックする代わりに、「低電力」状態に進入する際に一度だけチェックする。
5. ⏱️ タイムアウトとウォッチドッグの無視
リアルタイムシステムは時間の意識が求められる。イベントのトリガーにのみ依存する状態機械は脆弱である。イベントがまったく到着しなかったらどうなるか?ロボットは無限に待機し続ける。
タイムアウトの実装は、耐障害性にとって不可欠である。すべての状態には、アクティブに維持できる最大時間があるべきである。遷移条件が満たされない場合、タイマーがフォールバック状態を発動する。
- ハードウェアウォッチドッグ:ソフトウェアがフリーズした場合にシステムをリセットする外部機構。
- 内部タイマー:特定の状態に時間制限を課すために、状態機械内に組み込まれた論理。
- ハートビート信号:制御ループが動作中であり、応答していることを確認する。
タイムアウトがなければ、一時的なセンサーの誤作動でロボットが動けなくなる可能性がある。タイムアウト機構により、システムは滑らかに復旧し、リセットまたは安全モードへの移行を試みる。
6. 🚨 エラー回復状態の欠如
多くの図は「ハッピーパス」にのみ注目している。すべてが順調にいくときのロボットの動作を示すが、何かが壊れたときのロボットの振る舞いはほとんど示さない。
ロボットは構造化されていない環境で動作する。関節が詰まる、モーターが過熱する、通信が途切れることもある。明示的なエラー状態がなければ、システムはクラッシュしたり、予期せぬ振る舞いを示す可能性がある。
信頼性の高い状態機械には、以下が含まれるべきである:
- 安全状態: ロボットがすべての運動を停止し、介入を待つように指定された状態。
- 復旧ロジック: システムを自動的にリセットしようとするための手順。
- 診断出力: エンジニアが根本原因を特定するのを助けるために、特定のエラーコードを記録する。
エラー状態を無視すると、障害処理の負担がコード生成層に移り、多くの場合、エッジケースを効果的に処理するための文脈を欠いている。
7. 📦 データ伝達メカニズムの不備
データは遷移を通じて状態機械を経由して流れます。ロボットが「接近中」から「把持中」に移行する際、ターゲット座標を渡す必要があります。状態機械の図がデータの渡し方を明確に定義していない場合、コードは困難に直面します。
一般的な問題には以下が含まれます:
- グローバル変数: 同期なしに共有メモリに依存すると、レースコンディションが発生する。
- パラメータの欠落: 必要なデータ文脈なしに定義された遷移。
- データ遅延: 状態に入力された時点で古くなっているデータを渡すこと。
パラメータは遷移上で明示的に定義すべきである。これにより、受信側の状態が入力時刻に正確な情報を得られることが保証される。また、データ依存関係について図自体が自己文書化されるようになる。
8. 🏷️ 不明確な状態名の命名規則
状態機械における名前はデバッグの主なインターフェースである。 「State 1」や「Process」のような曖昧な名前では、システムの状態について何の情報を得られない。複雑なロボットでは、エンジニアがログを見てすぐにシステムが何をしているかを把握できる必要がある。
良い命名規則は以下の通りであるべきである:
- 記述的: 「Wheel_Motor_On」は「Run」よりも良い。
- 一貫性: すべての状態で同じ動詞の時制と名詞構造を使用する。
- 一意性: 「Error」と「Error_Handler」のように似た名前を避ける。
一貫した命名は、コードやログをレビューする際の認知負荷を軽減する。また、自動化ツールがモデルに基づいてより良いドキュメントやテストケースを生成するのを助ける。
表:一般的な落とし穴とベストプラクティス
| 領域 | 落とし穴 | ベストプラクティス |
|---|---|---|
| エントリポイント | 初期状態が定義されていません | 初期化ロジックを伴う明示的なエントリポイント |
| フローコントロール | 欠落した遷移によるデッドロック | すべての状態に終了パスがあることを確認する |
| 並列性 | 並列タスクの逐次処理 | 独立した活動には並列領域を使用する |
| ロジック | 複雑なガード条件 | ロジックを状態アクションに移動し、ガードを単純に保つ |
| タイミング | 待機状態にタイムアウトが設定されていない | ウォッチドッグと内部タイマーを実装する |
| 信頼性 | エラー状態が欠落している | 安全状態および回復状態を明示的に定義する |
| データ | 暗黙のグローバルデータ共有 | 遷移パラメータを介してデータを明示的に渡す |
| ドキュメント | 曖昧な状態名 | 説明的で一貫性のある命名規則を使用する |
実装上の考慮事項
図が最終化された後、コードへの変換には注意が必要です。モデルが実装を導くべきであり、逆ではないべきです。状態機械の制約を回避するためにコードを変更することは、しばしば技術的負債を生じます。
コードジェネレータはこのギャップを埋めるのに役立ちます。それらは実行時が設計と正確に一致することを保証します。しかし、下層のロジックを理解せずに生成にのみ依存することはリスクがあります。エンジニアは生成されたコードを読み、それが図の意図と一致していることを確認できる必要があります。
状態機械のテスト
単体テストは非常に重要です。各状態および遷移は独立して検証されるべきです。統合テストにより、状態の変更がシステムの他の部分に副作用を引き起こさないことを確認できます。
- 遷移テスト: 特定の入力が正しい状態変化を引き起こすことを確認する。
- 状態の検証: 有効な終了条件が発生するまで、システムが状態のままになることを確認する。
- ストレステスト: システムに負荷をかけ、タイミングの問題やレースコンディションがないか確認する。
シミュレーション環境により、故障モードの安全なテストが可能になる。エンジニアはセンサの故障や通信遅延を導入し、状態機械がどのように反応するかを確認できるが、ハードウェアにリスクをかけることなく行える。
不適切なモデル化のコスト
図面上の状態機械を修正するのは安価である。デプロイされたコードで修正するのは高価である。ロボティクスにおいて、論理エラーはロボットや環境に物理的損害をもたらす可能性がある。また、作業者の負傷を引き起こす可能性もある。
厳密な設計プロセスに時間を投資することは、安定性の向上につながる。よく文書化された状態機械は、開発チーム全体の単一の真実の源となる。ハードウェアエンジニアとソフトウェアエンジニアの間でのより良い協働を可能にする。
主な教訓の要約
信頼性の高いロボティクスコードの構築は、堅固なモデルから始まる。初期状態の欠落、デッドロック、並行処理の不適切な扱いといった一般的な落とし穴を避けることは必須である。強力なエラー処理と明確なデータ伝達メカニズムにより、システムが予期せぬ状態から回復できることが保証される。
これらの原則に従うことで、単に機能するだけでなく、耐障害性のある状態機械を構築できる。プロトタイプと製品の違いは、しばしば制御論理の品質に起因する。設計段階での細部への注意が、デプロイ段階での頭痛を防ぐ。
ロジックをシンプルに保つ。遷移を明確にする。エラーを前もって対処する。これらの実践は、信頼性の高いロボットシステムの基盤を成す。
