











Concevoir la logique de contrôle pour les systèmes autonomes exige une précision. Lorsque les ingénieurs passent de la conception à la mise en œuvre, le diagramme d’état du langage de modélisation unifié (UML) sert souvent de plan directeur. Toutefois, un décalage entre le diagramme et le code réel peut entraîner des échecs catastrophiques dans les environnements robotiques. Un robot qui hésite alors qu’il devrait avancer, ou qui entre dans une boucle infinie lors d’une tâche simple, provient souvent d’erreurs fondamentales dans l’architecture de la machine à états.
Construire un logiciel embarqué fiable exige plus que de dessiner des boîtes et des flèches. Il demande une compréhension approfondie du flux d’exécution, du timing et de la gestion des ressources. Ce guide examine les pièges spécifiques qui compromettent les machines à états robotiques. En identifiant ces faiblesses structurelles, les développeurs peuvent s’assurer que leurs systèmes fonctionnent avec la stabilité requise pour un déploiement dans le monde réel.
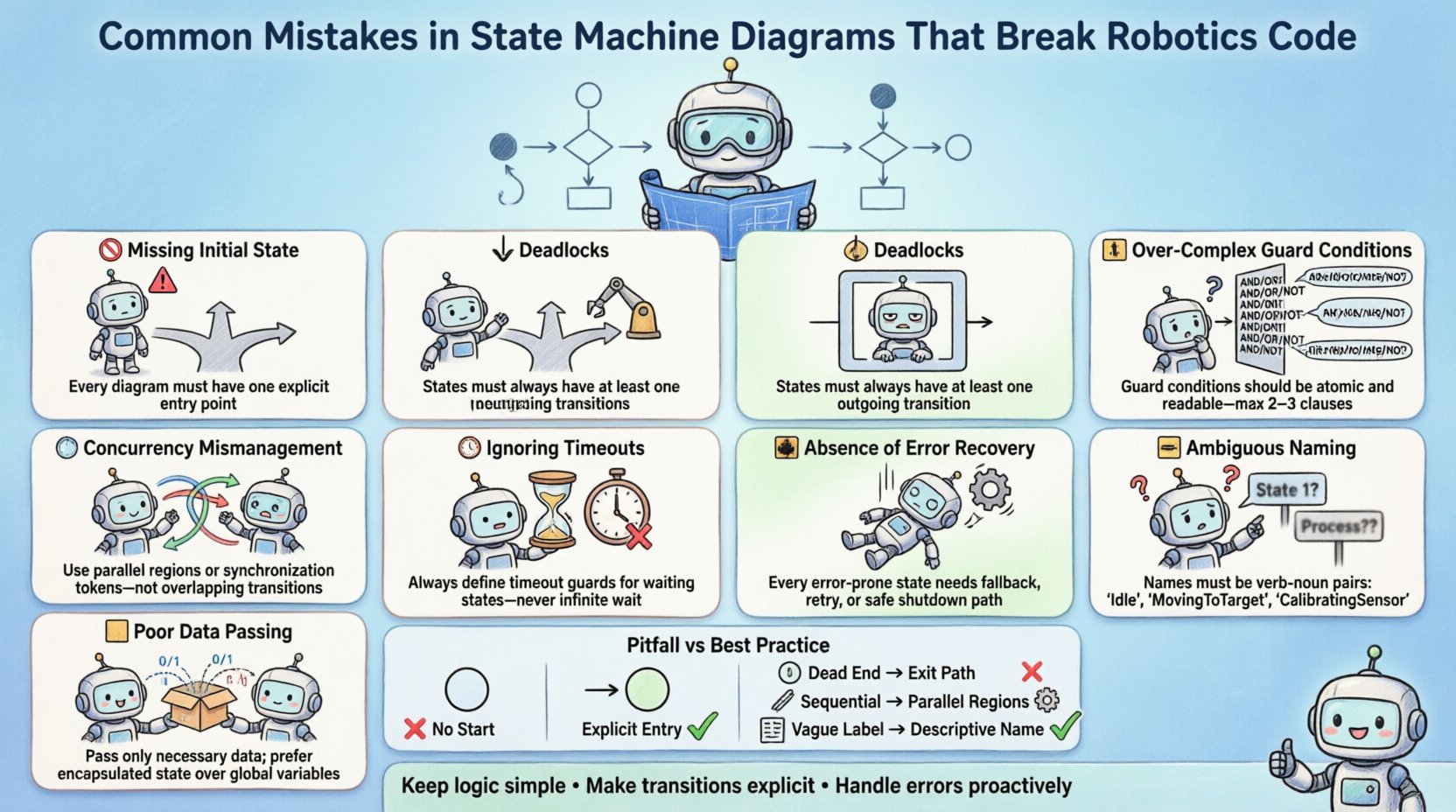
1. 🚫 L’état initial manquant
La fondation de toute machine à états finis (FSM) est l’état initial. C’est le point d’entrée où le système commence son fonctionnement au démarrage ou au redémarrage. Une erreur courante lors de la conception du diagramme consiste à omettre ce point de départ ou à le laisser ambigu.
Lorsqu’un code est généré à partir d’un diagramme qui ne définit pas d’état d’entrée, l’environnement d’exécution passe souvent à un état arbitraire. Dans un contexte robotique, cela signifie que le robot pourrait commencer dans l’état « En mouvement » alors qu’il devrait être en « Inactif ». Cela peut entraîner une activation immédiate des actionneurs, provoquant des risques de sécurité.
- Début non défini : Le code suppose qu’un état existe sans vérifier qu’il s’agit du point d’entrée correct.
- Problèmes liés au cycle d’alimentation : Au redémarrage, le robot peut conserver des données de la session précédente mais échouer à réinitialiser la logique de contrôle.
- Logique d’initialisation :Sans un état initial dédié, les séquences d’initialisation sont souvent réparties sur plusieurs fonctions de transition.
Chaque machine à états robuste doit définir explicitement la condition d’entrée. Cela garantit que les capteurs sont calibrés, les actionneurs freinés et que le contrôleur logique est prêt avant que le robot n’accepte des commandes externes.
2. ⏸️ Blocages et transitions manquantes
Un blocage se produit lorsque le système entre dans un état d’où aucune transition n’est possible. Dans un diagramme, cela ressemble à une boîte sans flèches sortantes. Dans le code, cela se manifeste par un blocage ou un gel.
Les robots fonctionnent dans des environnements dynamiques. Si un capteur ne parvient pas à transmettre des données, le robot ne doit pas s’arrêter indéfiniment. Une machine à états qui attend une condition qui ne se produira jamais crée un blocage. Cela est particulièrement dangereux dans les tâches de navigation où un robot pourrait attendre qu’un chemin soit dégagé, bloqué par un obstacle.
Les causes courantes des blocages incluent :
- États inaccessibles :Des états définis dans le diagramme mais jamais connectés au flux principal.
- Transitions par défaut manquantes :Oublier de définir une transition « tout capturant » pour les entrées imprévues.
- Contradictions logiques :Conditions de garde mutuellement exclusives, laissant aucune voie d’avancement.
Pour éviter cela, chaque état doit avoir un chemin de sortie défini. Si la condition attendue n’est pas remplie dans un délai spécifique, le système doit passer à un état d’expiration ou d’erreur plutôt que d’attendre indéfiniment.
3. 🔄 Gestion incorrecte de la concurrence
Les robots effectuent souvent plusieurs tâches simultanément. Un drone peut avoir besoin de stabiliser son vol tout en scannant les obstacles. Une machine à états séquentielle simple ne peut pas gérer cela. Les ingénieurs tentent parfois de modéliser la concurrence en imbriquant des états, mais cela conduit souvent à une logique complexe et difficile à maintenir.
La concurrence réelle exige des régions parallèles au sein de la machine à états. Si un diagramme montre un seul flux pour des tâches parallèles, le code généré exécutera probablement ces tâches une après l’autre. Cela introduit une latence qui peut être inacceptable pour des boucles de contrôle à haute vitesse.
- Exécution entrelacée :Le traitement séquentiel des tâches parallèles provoque des retards dans les opérations critiques.
- Contestation des ressources : Plusieurs états tentant d’accéder à la même ressource matérielle simultanément sans synchronisation.
- Explosion d’états : Essayer de modéliser chaque combinaison de tâches parallèles entraîne une explosion combinatoire d’états.
Une modélisation correcte consiste à identifier les activités indépendantes et à les attribuer à des régions parallèles distinctes. Cela permet au runtime de les planifier efficacement sans se bloquer mutuellement.
4. 🛑 Conditions de garde trop complexes
Les conditions de garde sont des expressions logiques qui déterminent si une transition peut avoir lieu. Bien qu’essentielles pour le contrôle, rendre ces conditions trop complexes obscurcit le flux logique. Une condition de garde qui s’étend sur cinq lignes de code est difficile à déboguer et à vérifier.
En robotique, les capteurs fournissent des données bruitées. Une condition de garde reposant sur plusieurs lectures de capteurs simultanément est sujette aux conditions de course. Si un capteur se met à jour légèrement avant un autre, la logique pourrait s’évaluer différemment de ce qui était prévu.
Des conditions de garde complexes entraînent :
- Dépendances cachées :L’ordre d’évaluation importe, mais n’est pas explicite dans le diagramme.
- Difficulté de débogage : Lorsqu’une transition ne se déclenche pas, il est difficile de déterminer quelle partie de la condition a échoué.
- Bloat de code : La logique complexe est souvent dupliquée sur plusieurs transitions.
Il est préférable de simplifier les conditions de garde. Déplacer la logique complexe dans les actions d’entrée ou de sortie d’un état. Cela maintient les transitions propres et le diagramme d’états lisible. Par exemple, au lieu de vérifier le niveau de la batterie à chaque transition, le vérifier une seule fois à l’entrée de l’état « Faible Puissance ».
5. ⏱️ Ignorer les délais d’attente et les watchdogs
Les systèmes temps réel nécessitent une prise de conscience du temps. Une machine à états qui repose uniquement sur des déclencheurs d’événements est fragile. Que se passe-t-il si un événement n’arrive jamais ? Le robot attend indéfiniment.
Mettre en œuvre des délais d’attente est crucial pour la résilience. Chaque état doit avoir une durée maximale pendant laquelle il peut rester actif. Si la condition de transition n’est pas remplie, une minuterie déclenche un état de secours.
- Watchdogs matériels :Mécanismes externes qui redémarrent le système si le logiciel se bloque.
- Minuteries internes :Logique à l’intérieur de la machine à états pour imposer des limites de temps sur des états spécifiques.
- Signaux de battement de cœur :Assurer que la boucle de contrôle est active et réactive.
Sans délais d’attente, un bogue temporaire d’un capteur peut bloquer le robot sur place. Un mécanisme de délai d’attente assure que le système se rétablit correctement et tente de redémarrer ou d’entrer en mode sûr.
6. 🚨 Absence d’états de récupération d’erreurs
Beaucoup de diagrammes se concentrent uniquement sur le « chemin heureux ». Ils montrent comment le robot fonctionne quand tout va bien. Ils montrent rarement comment le robot se comporte quand les choses échouent.
Les robots opèrent dans des environnements non structurés. Les articulations peuvent bloquer, les moteurs peuvent surchauffer, ou la communication peut tomber. Sans états d’erreur explicites, le système peut planter ou se comporter de manière imprévisible.
Une machine à états robuste inclut :
- États sécurisés : Un état désigné où le robot s’arrête complètement et attend une intervention.
- Logique de récupération : Étapes entreprises pour tenter de réinitialiser le système automatiquement.
- Sorties de diagnostic : Journalisation de codes d’erreur spécifiques pour aider les ingénieurs à identifier la cause racine.
Ignorer les états d’erreur déplace la charge de gestion des défaillances vers la couche de génération de code, qui manque souvent du contexte nécessaire pour traiter efficacement les cas limites.
7. 📦 Mécanismes de transmission de données médiocres
Les données circulent à travers une machine d’états via des transitions. Lorsqu’un robot passe de « s’approchant » à « saisissant », il doit transmettre les coordonnées cibles. Si le diagramme de la machine d’états ne définit pas clairement la manière dont les données sont transmises, le code aura des difficultés.
Les problèmes courants incluent :
- Variables globales :Compter sur la mémoire partagée sans synchronisation entraîne des conditions de course.
- Paramètres manquants :Transitions définies sans le contexte de données nécessaire.
- Latence des données :Transmission de données obsolètes au moment où l’état est atteint.
Les paramètres doivent être explicitement définis sur les transitions. Cela garantit que l’état récepteur dispose de l’information exacte dont il a besoin au moment de son entrée. Cela rend également le diagramme auto-documenté en ce qui concerne les dépendances de données.
8. 🏷️ Conventions de nommage d’états ambigües
Les noms dans une machine d’états constituent l’interface principale pour le débogage. Des noms vagues comme « État 1 » ou « Processus » ne donnent aucune indication sur l’état du système. Dans un robot complexe, un ingénieur doit pouvoir consulter un journal et immédiatement savoir ce que le système fait.
Les bonnes conventions de nommage doivent être :
- Descriptifs : « Wheel_Motor_On » est préférable à « Run ».
- Consisants : Utilisez le même temps verbal et la même structure de nom dans tous les états.
- Uniques : Évitez les noms qui se ressemblent, comme « Error » et « Error_Handler ».
Un nommage cohérent réduit la charge cognitive lors de la revue du code ou des journaux. Cela aide également les outils automatisés à générer une documentation et des cas de test plus performants à partir du modèle.
Tableau : Pièges courants vs. Meilleures pratiques
| Domaine | Piège | Meilleure pratique |
|---|---|---|
| Point d’entrée | Aucun état initial défini | Point d’entrée explicite avec logique d’initialisation |
| Contrôle de flux | Bloquages dus à des transitions manquantes | Assurez-vous qu’il existe un chemin de sortie pour chaque état |
| Parallélisme | Traitement séquentiel des tâches parallèles | Utilisez des régions parallèles pour les activités indépendantes |
| Logique | Conditions de garde complexes | Déplacez la logique vers les actions d’état, gardez les conditions de garde simples |
| Temps | Pas de délais d’attente sur les états d’attente | Implémentez des superviseurs (watchdogs) et des minuteries internes |
| Fiabilité | États d’erreur manquants | Définissez explicitement les états sécuritaires et de récupération |
| Données | Partage implicite de données globales | Passez les données explicitement via les paramètres de transition |
| Documentation | Noms d’états ambigus | Utilisez des conventions de nommage descriptives et cohérentes |
Considérations relatives à l’implémentation
Une fois le diagramme finalisé, la traduction en code exige une attention particulière. Le modèle doit piloter l’implémentation, et non l’inverse. Modifier le code pour contourner une contrainte de machine à états conduit souvent à une dette technique.
Les générateurs de code peuvent aider à combler cet écart. Ils garantissent que l’exécution correspond exactement au design. Toutefois, se fier uniquement à la génération sans comprendre la logique sous-jacente est risqué. Les ingénieurs doivent être capables de lire le code généré et de vérifier qu’il correspond bien à l’intention du diagramme.
Test de la machine à états
Le test unitaire est essentiel. Chaque état et transition doit être vérifié indépendamment. Le test d’intégration assure que les changements d’état ne provoquent pas d’effets secondaires dans d’autres parties du système.
- Test des transitions : Vérifiez que des entrées spécifiques déclenchent les changements d’état corrects.
- Vérification de l’état : Assurez-vous que le système reste dans un état jusqu’à ce qu’une condition de sortie valide se produise.
- Tests de charge : Exécutez le système sous charge pour détecter les problèmes de temporisation ou les conditions de course.
Les environnements de simulation permettent un test sûr des modes de défaillance. Les ingénieurs peuvent introduire des défaillances de capteurs ou des retards de communication pour observer la réaction de la machine d’état sans risquer de dommages matériels.
Le coût d’un mauvais modèle
Corriger une machine d’état sur le schéma est peu coûteux. La correction dans le code déployé est coûteuse. En robotique, une erreur logique peut entraîner des dommages physiques au robot ou à l’environnement. Elle peut aussi entraîner des blessures aux opérateurs.
Investir du temps dans un processus de conception rigoureux se traduit par une meilleure stabilité. Une machine d’état bien documentée constitue une source unique de vérité pour l’ensemble de l’équipe de développement. Elle facilite une meilleure collaboration entre les ingénieurs matériels et logiciels.
Résumé des points clés
La construction de code robotique fiable commence par un modèle solide. Éviter les pièges courants tels que l’absence d’états initiaux, les blocages ou une gestion médiocre de la concurrence est essentiel. Une gestion robuste des erreurs et des mécanismes clairs de passage de données garantissent que le système peut se remettre de conditions imprévues.
En suivant ces principes, les développeurs peuvent créer des machines d’état qui sont non seulement fonctionnelles, mais aussi résilientes. La différence entre un prototype et un produit réside souvent dans la qualité de la logique de contrôle. Une attention aux détails lors de la phase de conception évite les problèmes lors du déploiement.
Gardez la logique simple. Rendez les transitions explicites. Gérez les erreurs de manière proactive. Ces pratiques forment la base des systèmes robotiques fiables.
