











Merancang logika kontrol untuk sistem otonom membutuhkan ketelitian. Ketika insinyur berpindah dari konsep ke implementasi, diagram mesin status bahasa pemodelan terpadu (UML) sering berfungsi sebagai gambaran rancangan. Namun, ketidaksesuaian antara diagram dan kode sebenarnya dapat menyebabkan kegagalan mengerikan dalam lingkungan robotika. Robot yang ragu-ragu saat harus bergerak, atau yang masuk ke dalam loop tak terbatas saat melakukan tugas sederhana, sering berasal dari kesalahan mendasar dalam arsitektur mesin status.
Membangun perangkat lunak tertanam yang dapat diandalkan membutuhkan lebih dari sekadar menggambar kotak dan panah. Diperlukan pemahaman mendalam tentang alur eksekusi, waktu, dan manajemen sumber daya. Panduan ini meninjau bahaya-bahaya spesifik yang melemahkan mesin status robotika. Dengan mengidentifikasi kelemahan struktural ini, pengembang dapat memastikan sistem mereka beroperasi dengan stabilitas yang dibutuhkan untuk penempatan di dunia nyata.
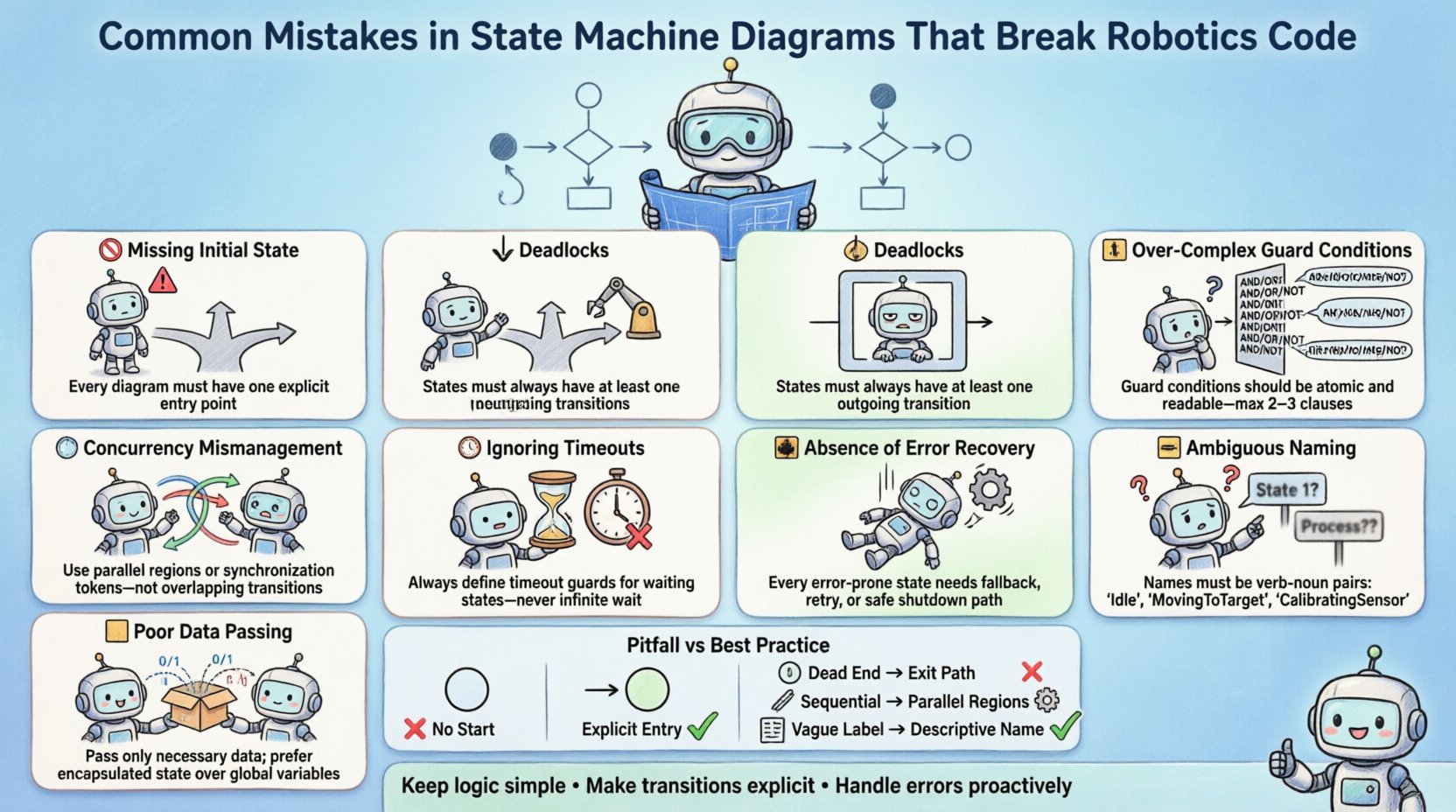
1. 🚫 Status Awal yang Hilang
Dasar dari setiap mesin status hingga (FSM) adalah status awal. Ini adalah titik masuk tempat sistem memulai operasinya saat dinyalakan atau direset. Kesalahan umum dalam pembuatan diagram adalah mengabaikan titik awal ini atau membuatnya tidak jelas.
Ketika kode dihasilkan dari diagram yang tidak memiliki status masuk yang didefinisikan, lingkungan runtime sering kali beralih ke status sembarang. Dalam konteks robotika, ini berarti robot bisa mulai dalam status ‘Bergerak’ padahal seharusnya dalam status ‘Diam’. Hal ini dapat menyebabkan aktivasi aktuator secara langsung, yang berpotensi menimbulkan bahaya keselamatan.
- Mulai yang Tidak Didefinisikan: Kode mengasumsikan suatu status ada tanpa memverifikasi apakah itu titik masuk yang benar.
- Masalah Siklus Daya: Saat dihidupkan kembali, robot mungkin menyimpan data dari sesi sebelumnya tetapi gagal mereset logika kontrol.
- Logika Inisialisasi: Tanpa status awal yang khusus, urutan inisialisasi sering tersebar di berbagai fungsi transisi.
Setiap mesin status yang kuat harus secara eksplisit mendefinisikan kondisi masuk. Ini memastikan bahwa sensor dikalibrasi, aktuator dibatasi, dan pengendali logika siap sebelum robot menerima perintah eksternal.
2. ⏸️ Kebuntuan dan Transisi yang Hilang
Kebuntuan terjadi ketika sistem memasuki suatu status di mana tidak ada transisi yang mungkin. Dalam diagram, ini tampak seperti kotak tanpa panah keluar. Dalam kode, ini muncul sebagai kegagalan atau pembekuan.
Robot beroperasi dalam lingkungan yang dinamis. Jika sensor gagal melaporkan data, robot tidak boleh berhenti tanpa batas. Mesin status yang menunggu kondisi yang tidak pernah terjadi akan menciptakan kebuntuan. Ini sangat berbahaya dalam tugas navigasi di mana robot mungkin menunggu jalur yang harus dibersihkan, padahal terhalang oleh rintangan.
Penyebab umum kebuntuan meliputi:
- Status yang Tidak Dapat Dicapai:Status yang didefinisikan dalam diagram tetapi tidak pernah terhubung ke alur utama.
- Transisi Default yang Hilang:Gagal mendefinisikan transisi ‘semua tangkap’ untuk input yang tidak terduga.
- Kontradiksi Logis:Kondisi penjaga yang saling eksklusif, sehingga tidak ada jalur yang tersisa untuk melanjutkan.
Untuk mencegah hal ini, setiap status harus memiliki jalur keluar yang didefinisikan. Jika kondisi yang diharapkan tidak terpenuhi dalam waktu tertentu, sistem harus beralih ke status timeout atau kesalahan, bukan menunggu selamanya.
3. 🔄 Pengelolaan Konkurensi yang Salah
Robot sering melakukan beberapa tugas secara bersamaan. Sebuah drone mungkin perlu menstabilkan penerbangannya sambil memindai rintangan. Mesin status sekuen sederhana tidak dapat menangani hal ini. Insinyur terkadang mencoba memodelkan konkurensi dengan menyisipkan status, tetapi ini sering menghasilkan logika yang rumit dan sulit dipelihara.
Konkurensi sejati membutuhkan wilayah paralel dalam mesin status. Jika diagram menunjukkan alur tunggal untuk tugas paralel, kode yang dihasilkan kemungkinan besar akan menjalankannya satu per satu. Ini menimbulkan latensi yang bisa tidak dapat diterima untuk loop kontrol berkecepatan tinggi.
- Eksekusi Berselang-Seling:Pemrosesan tugas paralel secara berurutan menyebabkan penundaan dalam operasi kritis.
- Persaingan Sumber Daya: Banyak status yang mencoba mengakses sumber daya perangkat keras yang sama secara bersamaan tanpa sinkronisasi.
- Ledakan Status: Mencoba memodelkan setiap kombinasi tugas paralel menghasilkan ledakan kombinatorial pada status.
Pemodelan yang tepat melibatkan identifikasi aktivitas yang independen dan menugaskannya ke wilayah paralel yang berbeda. Ini memungkinkan runtime untuk menjadwalkan mereka secara efisien tanpa saling menghambat.
4. 🛑 Kondisi Pengawas yang Terlalu Kompleks
Kondisi pengawas adalah ekspresi logika yang menentukan apakah suatu transisi dapat terjadi. Meskipun penting untuk kontrol, membuat kondisi ini terlalu kompleks menyembunyikan alur logika. Kondisi pengawas yang mencakup lima baris kode sulit didebug dan diverifikasi.
Dalam robotika, sensor menghasilkan data yang bising. Kondisi pengawas yang bergantung pada pembacaan beberapa sensor secara bersamaan rentan terhadap kondisi persaingan. Jika satu sensor diperbarui sedikit lebih awal daripada yang lain, logika mungkin dievaluasi berbeda dari yang dimaksudkan.
Kondisi pengawas yang kompleks mengarah pada:
- Ketergantungan Tersembunyi:Urutan evaluasi penting, tetapi tidak jelas dalam diagram.
- Kesulitan Debugging:Ketika suatu transisi gagal dipicu, sulit untuk menentukan bagian mana dari kondisi yang gagal.
- Kode yang Berlebihan:Logika yang kompleks sering kali diulang di berbagai transisi.
Lebih baik menyederhanakan kondisi pengawas. Pindahkan logika yang kompleks ke tindakan masuk atau keluar suatu status. Ini menjaga transisi tetap bersih dan diagram status mudah dibaca. Misalnya, alih-alih memeriksa tingkat baterai di setiap transisi, lakukan pemeriksaan sekali saat memasuki status ‘Daya Rendah’.
5. ⏱️ Mengabaikan Waktu Habis dan Penjaga Internal
Sistem waktu nyata membutuhkan kesadaran terhadap waktu. Mesin status yang hanya mengandalkan pemicu peristiwa bersifat rapuh. Apa yang terjadi jika suatu peristiwa tidak pernah datang? Robot akan menunggu tanpa akhir.
Menerapkan waktu habis sangat penting untuk ketahanan. Setiap status harus memiliki durasi maksimum yang dapat tetap aktif. Jika kondisi transisi tidak terpenuhi, timer akan memicu status cadangan.
- Penjaga Internal Perangkat Keras:Mekanisme eksternal yang mereset sistem jika perangkat lunak macet.
- Timer Internal:Logika di dalam mesin status untuk menerapkan batas waktu pada status tertentu.
- Sinyal Detak Jantung:Memastikan loop kontrol aktif dan merespons.
Tanpa waktu habis, gangguan sementara pada sensor dapat mengunci robot di tempatnya. Mekanisme waktu habis memastikan sistem pulih secara halus dan berusaha melakukan reset atau memasuki mode aman.
6. 🚨 Ketidakhadiran Status Pemulihan Kesalahan
Banyak diagram hanya fokus pada ‘jalur bahagia’. Mereka menunjukkan bagaimana robot berfungsi ketika semuanya berjalan lancar. Mereka jarang menunjukkan bagaimana robot berperilaku ketika terjadi kerusakan.
Robot beroperasi di lingkungan yang tidak terstruktur. Sendi bisa macet, motor bisa terlalu panas, atau komunikasi bisa terputus. Tanpa status kesalahan yang jelas, sistem bisa saja mengalami kegagalan atau berperilaku tidak terduga.
Mesin status yang kuat mencakup:
- Status Aman: Sebuah status yang ditentukan di mana robot menghentikan semua gerakan dan menunggu intervensi.
- Logika Pemulihan: Langkah-langkah yang diambil untuk mencoba mengatur ulang sistem secara otomatis.
- Keluaran Diagnostik: Mencatat kode kesalahan tertentu untuk membantu insinyur mengidentifikasi akar penyebabnya.
Mengabaikan status kesalahan memindahkan beban penanganan kegagalan ke lapisan generasi kode, yang sering kali tidak memiliki konteks untuk menangani kasus-kasus tepi secara efektif.
7. 📦 Mekanisme Penyerahan Data yang Buruk
Data mengalir melalui mesin status melalui transisi. Ketika robot bergerak dari ‘Mendekati’ ke ‘Menggenggam’, perlu menyerahkan koordinat target. Jika diagram mesin status tidak dengan jelas mendefinisikan cara data diserahkan, kode akan mengalami kesulitan.
Masalah umum meliputi:
- Variabel Global:Mengandalkan memori bersama tanpa sinkronisasi menyebabkan kondisi persaingan.
- Parameter yang Hilang:Transisi yang didefinisikan tanpa konteks data yang diperlukan.
- Latensi Data:Menyerahkan data yang sudah usang pada saat status dimasuki.
Parameter harus didefinisikan secara eksplisit pada transisi. Ini memastikan bahwa status penerima memiliki informasi tepat yang dibutuhkan pada saat masuk. Ini juga membuat diagram menjadi dokumentasi diri mengenai ketergantungan data.
8. 🏷️ Konvensi Penamaan Status yang Ambigu
Nama-nama dalam mesin status merupakan antarmuka utama untuk debugging. Nama yang samar seperti ‘State 1’ atau ‘Proses’ tidak memberikan wawasan tentang status sistem. Pada robot yang kompleks, insinyur perlu melihat log dan langsung mengetahui apa yang sedang dilakukan sistem.
Konvensi penamaan yang baik seharusnya:
- Deskriptif: ‘Wheel_Motor_On’ lebih baik daripada ‘Run’.
- Konsisten: Gunakan waktu kata kerja dan struktur kata benda yang sama di seluruh status.
- Unik: Hindari nama yang terlihat mirip, seperti ‘Error’ dan ‘Error_Handler’.
Penamaan yang konsisten mengurangi beban kognitif saat meninjau kode atau log. Ini juga membantu alat otomatis menghasilkan dokumentasi dan kasus pengujian yang lebih baik berdasarkan model.
Tabel: Kesalahan Umum vs. Praktik Terbaik
| Area | Kesalahan | Praktik Terbaik |
|---|---|---|
| Titik Masuk | Tidak ada status awal yang ditentukan | Titik masuk eksplisit dengan logika inisialisasi |
| Kontrol Aliran | Kebuntuan akibat transisi yang hilang | Pastikan setiap status memiliki jalur keluar |
| Paralelisme | Pemrosesan berurutan dari tugas paralel | Gunakan wilayah paralel untuk aktivitas yang independen |
| Logika | Kondisi penjaga yang kompleks | Pindahkan logika ke tindakan status, pertahankan penjaga sederhana |
| Waktu | Tidak ada waktu habis pada status menunggu | Implementasikan penjaga waktu dan timer internal |
| Keandalan | Status kesalahan yang hilang | Tentukan status aman dan pemulihan secara eksplisit |
| Data | Berbagi data global implisit | Kirim data secara eksplisit melalui parameter transisi |
| Dokumentasi | Nama status yang ambigu | Gunakan konvensi penamaan yang deskriptif dan konsisten |
Pertimbangan Implementasi
Setelah diagram selesai, penerjemahan ke kode membutuhkan kehati-hatian. Model harus mengarahkan implementasi, bukan sebaliknya. Memodifikasi kode untuk menghindari keterbatasan mesin status sering kali menyebabkan utang teknis.
Generator kode dapat membantu mengisi celah ini. Mereka memastikan runtime sesuai persis dengan desain. Namun, mengandalkan generasi semata tanpa memahami logika dasar sangat berisiko. Insinyur harus mampu membaca kode yang dihasilkan dan memverifikasi bahwa kode tersebut sesuai dengan tujuan diagram.
Menguji Mesin Status
Uji unit sangat penting. Setiap status dan transisi harus diverifikasi secara independen. Uji integrasi memastikan perubahan status tidak menyebabkan efek samping di bagian lain sistem.
- Pengujian Transisi: Verifikasi bahwa input tertentu memicu perubahan status yang benar.
- Verifikasi Status:Pastikan sistem tetap berada dalam status hingga kondisi keluar yang valid terjadi.
- Uji Stres:Jalankan sistem dalam kondisi beban tinggi untuk memeriksa masalah waktu atau kondisi persaingan.
Lingkungan simulasi memungkinkan pengujian aman terhadap mode kegagalan. Insinyur dapat memasukkan kegagalan sensor atau keterlambatan komunikasi untuk melihat bagaimana mesin status bereaksi tanpa mengancam perangkat keras.
Biaya dari Pemodelan yang Buruk
Memperbaiki mesin status dalam diagram adalah murah. Memperbaikinya dalam kode yang telah diimplementasikan jauh lebih mahal. Dalam robotika, kesalahan logika dapat berarti kerusakan fisik pada robot atau lingkungan. Bisa juga berarti cedera bagi operator.
Menginvestasikan waktu dalam proses desain yang ketat memberikan hasil dalam stabilitas. Mesin status yang didokumentasikan dengan baik berfungsi sebagai satu-satunya sumber kebenaran bagi seluruh tim pengembangan. Ini memungkinkan kolaborasi yang lebih baik antara insinyur perangkat keras dan perangkat lunak.
Ringkasan Poin-Poin Utama
Membangun kode robotika yang dapat diandalkan dimulai dari model yang kuat. Menghindari jebakan umum seperti kehilangan status awal, deadlock, dan penanganan konkurensi yang buruk sangat penting. Penanganan kesalahan yang kuat dan mekanisme penyerahan data yang jelas memastikan sistem dapat pulih dari kondisi yang tidak terduga.
Dengan mematuhi prinsip-prinsip ini, pengembang dapat membuat mesin status yang tidak hanya berfungsi, tetapi juga tangguh. Perbedaan antara prototipe dan produk sering terletak pada kualitas logika kontrol. Perhatian terhadap detail pada tahap desain mencegah masalah di tahap implementasi.
Jaga logika tetap sederhana. Buat transisi menjadi jelas. Tangani kesalahan secara proaktif. Praktik-praktik ini membentuk dasar sistem robotika yang dapat diandalkan.
