











为自主系统设计控制逻辑需要精确性。当工程师从概念转向实现时,统一建模语言(UML)状态机图通常充当蓝图。然而,图表与实际代码之间的脱节可能导致机器人环境中灾难性故障。机器人本应移动却犹豫不决,或在执行简单任务时陷入无限循环,这些情况往往源于状态机架构中的根本性错误。
构建可靠的嵌入式软件不仅需要画方框和箭头。它还需要对执行流程、时序和资源管理有深入理解。本指南分析了损害机器人状态机的特定陷阱。通过识别这些结构性弱点,开发者可以确保其系统在现实世界部署中具备所需的稳定性。
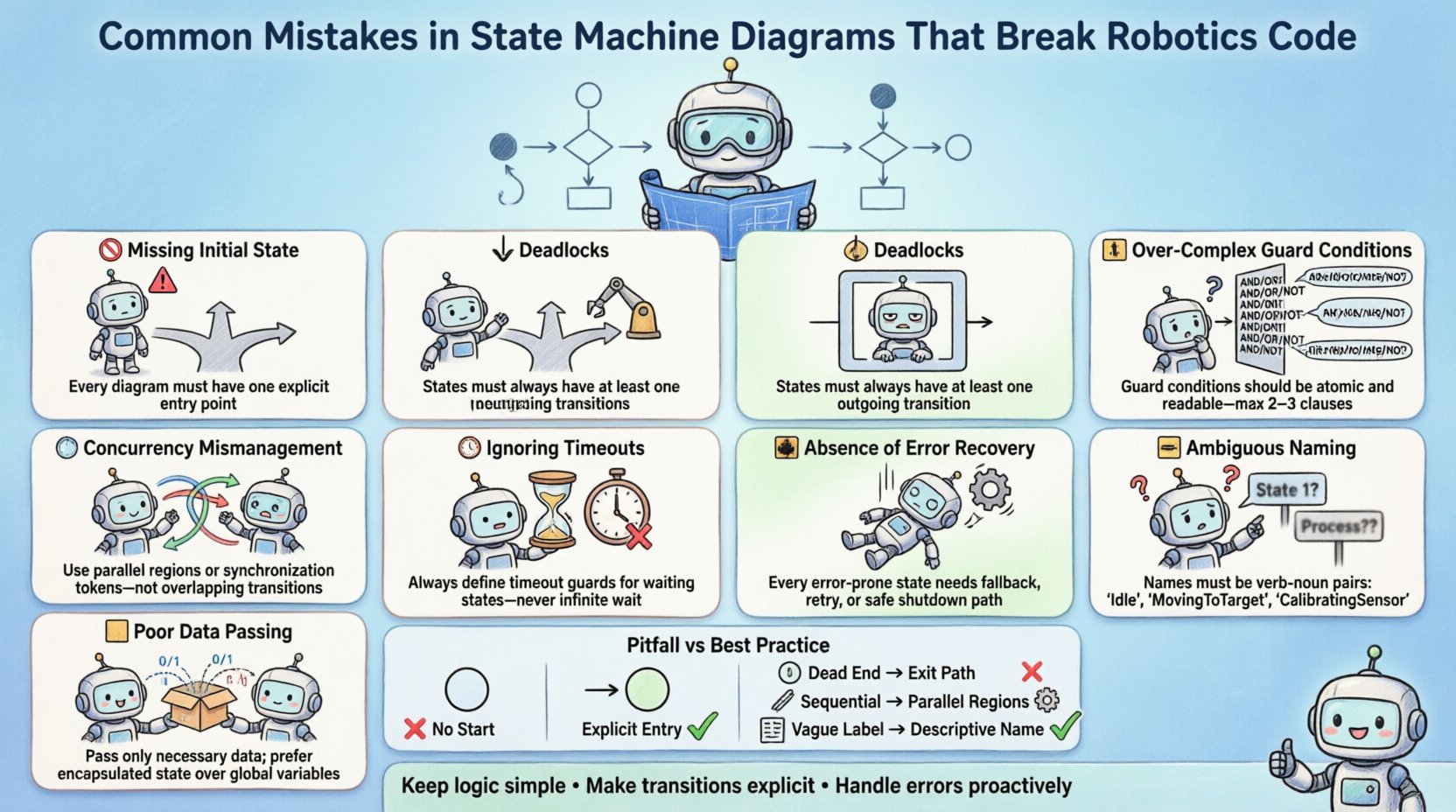
1. 🚫 缺失的初始状态
任何有限状态机(FSM)的基础是初始状态。这是系统在上电或复位后开始运行的入口点。绘图时常见的错误是遗漏这个起点,或使其模糊不清。
当从一个未定义入口状态的图表生成代码时,运行时环境通常会默认进入一个任意状态。在机器人场景中,这意味着机器人可能在本应处于“空闲”状态时却启动在“移动”状态。这可能导致执行器立即激活,从而引发安全隐患。
- 未定义的起始点: 代码假设某个状态存在,但未验证其是否为正确的入口点。
- 上电循环问题: 重启时,机器人可能保留上一次会话的数据,但未能重置控制逻辑。
- 初始化逻辑: 若没有专门的初始状态,初始化序列通常会分散在多个转换函数中。
每个健壮的状态机都必须明确地定义入口条件。这能确保传感器已校准、执行器已制动,并且逻辑控制器在机器人接受外部命令前已准备就绪。
2. ⏸️ 死锁与缺失的转换
当系统进入一个无法进行任何转换的状态时,就会发生死锁。在图表中,这表现为一个没有出边箭头的方框。在代码中,这表现为程序挂起或冻结。
机器人在动态环境中运行。如果传感器未能报告数据,机器人不应无限期停止。一个等待永远不会发生的条件的状态机将导致死锁。这在导航任务中尤其危险,因为机器人可能在等待一条被障碍物阻挡而无法清理的路径。
死锁的常见原因包括:
- 不可达状态: 图表中定义了但从未连接到主流程的状态。
- 缺失默认转换: 未为意外输入定义“兜底”转换。
- 逻辑矛盾: 相互排斥的保护条件,导致没有前进路径。
为防止此类问题,每个状态都应有明确的退出路径。如果在特定时间内未满足预期条件,系统应转入超时或错误状态,而不是无限等待。
3. 🔄 并发管理不当
机器人通常需要同时执行多个任务。一架无人机可能需要在扫描障碍物的同时保持飞行稳定。简单的顺序状态机无法处理这种情况。工程师有时尝试通过嵌套状态来模拟并发,但这往往导致复杂且难以维护的逻辑。
真正的并发需要状态机内部包含并行区域。如果图表中为并行任务显示单一流程,生成的代码很可能会依次执行这些任务。这会引入延迟,对于高速控制回路来说可能是不可接受的。
- 交错执行: 并行任务的顺序处理会导致关键操作出现延迟。
- 资源竞争: 多个状态同时尝试访问同一硬件资源而没有同步。
- 状态爆炸: 尝试为每个并行任务的组合建模会导致状态数量呈组合爆炸式增长。
正确的建模需要识别独立的活动,并将其分配到不同的并行区域。这使得运行时能够高效调度它们,而不会相互阻塞。
4. 🛑 过于复杂的守卫条件
守卫条件是决定转换是否可以发生的逻辑表达式。虽然对控制至关重要,但过于复杂的条件会掩盖逻辑流程。一个跨越五行代码的守卫条件很难调试和验证。
在机器人技术中,传感器提供的是噪声数据。依赖于多个传感器同时读数的守卫条件容易出现竞争条件。如果一个传感器比另一个稍早更新,逻辑可能会以与预期不同的方式评估。
复杂的守卫条件会导致:
- 隐藏的依赖关系: 评估顺序很重要,但在图中并未明确显示。
- 调试困难: 当转换未能触发时,很难确定是条件的哪一部分失败了。
- 代码膨胀: 复杂的逻辑经常在多个转换中重复出现。
更好的做法是简化守卫条件。将复杂的逻辑移至状态的入口或出口动作中。这可以使转换保持简洁,状态图也更易读。例如,与其在每次转换时都检查电池电量,不如在进入“低电量”状态时检查一次即可。
5. ⏱️ 忽视超时和看门狗
实时系统需要具备时间意识。仅依赖事件触发的状态机是脆弱的。如果事件从未到达会发生什么?机器人将无限期等待。
实现超时机制对于系统韧性至关重要。每个状态都应有其可保持活动的最大时长。如果转换条件未满足,计时器将触发一个回退状态。
- 硬件看门狗: 如果软件卡死,外部机制会重置系统。
- 内部计时器: 状态机内部的逻辑,用于对特定状态施加时间限制。
- 心跳信号: 确保控制回路处于活动状态并能响应。
如果没有超时机制,临时的传感器故障可能会使机器人卡住。超时机制可确保系统能够优雅恢复,并尝试重置或进入安全模式。
6. 🚨 缺少错误恢复状态
许多图只关注“正常路径”。它们展示了当一切顺利时机器人如何工作。但很少展示当出现问题时机器人会如何表现。
机器人在非结构化环境中运行。关节可能卡住,电机可能过热,或通信可能中断。如果没有明确的错误状态,系统可能会崩溃或行为不可预测。
一个健壮的状态机应包含:
- 安全状态: 一个指定状态,机器人在此停止所有运动并等待干预。
- 恢复逻辑: 为尝试自动重置系统而采取的步骤。
- 诊断输出: 记录特定错误代码,以帮助工程师识别根本原因。
忽略错误状态会将故障处理的责任转移到代码生成层,而该层通常缺乏处理边缘情况所需的上下文。
7. 📦 数据传递机制不佳
数据通过状态机的转换流动。当机器人从“接近”状态转移到“抓取”状态时,需要传递目标坐标。如果状态机图未明确说明数据如何传递,代码将难以处理。
常见问题包括:
- 全局变量: 依赖未同步的共享内存会导致竞争条件。
- 缺少参数: 在缺乏必要数据上下文的情况下定义转换。
- 数据延迟: 传递在进入状态时已过时的数据。
参数应在转换上明确定义。这确保接收状态在进入时拥有其所需的确切信息。同时,这也使图表能够自文档化地展示数据依赖关系。
8. 🏷️ 模糊的状态命名规范
状态机中的名称是调试的主要接口。像“State 1”或“Process”这样的模糊名称无法提供系统状态的任何信息。在复杂的机器人系统中,工程师需要查看日志后立即了解系统正在做什么。
良好的命名规范应具备:
- 描述性: “Wheel_Motor_On” 比 “Run” 更好。
- 一致性: 所有状态应使用相同的动词时态和名词结构。
- 唯一性: 避免名称相似的情况,例如“Error”和“Error_Handler”。
一致的命名可以降低审查代码或日志时的认知负荷。同时,也有助于自动化工具基于模型生成更优质的文档和测试用例。
表格:常见陷阱与最佳实践
| 领域 | 陷阱 | 最佳实践 |
|---|---|---|
| 入口点 | 未定义初始状态 | 带有初始化逻辑的显式入口点 |
| 流程控制 | 由于缺少转换导致的死锁 | 确保每个状态都有退出路径 |
| 并行性 | 并行任务的顺序处理 | 为独立活动使用并行区域 |
| 逻辑 | 复杂的守卫条件 | 将逻辑移至状态动作,保持守卫简单 |
| 定时 | 等待状态上没有超时 | 实现看门狗和内部计时器 |
| 可靠性 | 缺少错误状态 | 明确定义安全状态和恢复状态 |
| 数据 | 隐式全局数据共享 | 通过转换参数显式传递数据 |
| 文档 | 状态名称不明确 | 使用描述性强且一致的命名约定 |
实现注意事项
一旦图表确定,转换为代码就需要谨慎。模型应驱动实现,而不是反过来。修改代码以绕过状态机约束通常会导致技术债务。
代码生成器可以帮助弥合这一差距。它们确保运行时与设计完全一致。然而,仅依赖生成而不懂底层逻辑是危险的。工程师必须能够阅读生成的代码,并验证其是否符合图表的意图。
测试状态机
单元测试至关重要。每个状态和转换都应独立验证。集成测试确保状态变化不会在系统其他部分引起副作用。
- 转换测试: 确保特定输入触发正确的状态变化。
- 状态验证: 确保系统在有效退出条件发生前保持在该状态。
- 压力测试: 在负载下运行系统,以检查是否存在时序问题或竞争条件。
模拟环境允许安全地测试故障模式。工程师可以引入传感器故障或通信延迟,以观察状态机的反应,而不会危及硬件。
不良建模的代价
在图中修复状态机成本低廉。在已部署的代码中修复则代价高昂。在机器人领域,逻辑错误可能导致机器人或环境的物理损坏,也可能导致操作人员受伤。
投入时间进行严谨的设计过程,将在稳定性方面获得回报。一个文档齐全的状态机可作为整个开发团队的唯一可信来源。它有助于硬件和软件工程师之间更好地协作。
关键要点总结
构建可靠的机器人代码始于一个坚实的设计模型。避免常见的陷阱,如缺少初始状态、死锁以及不良的并发处理,至关重要。强大的错误处理机制和清晰的数据传递方式,可确保系统在意外情况下仍能恢复。
遵循这些原则,开发者可以创建出不仅功能正常,而且具有韧性的状态机。原型与产品之间的区别,往往在于控制逻辑的质量。设计阶段的细致入微,可避免部署阶段的诸多麻烦。
保持逻辑简单。使状态转换明确。主动处理错误。这些实践构成了可靠机器人系统的核心。
