











Diseñar la lógica de control para sistemas autónomos requiere precisión. Cuando los ingenieros pasan de la concepción a la implementación, el diagrama de máquina de estados del Lenguaje Unificado de Modelado (UML) suele servir como plano. Sin embargo, una desconexión entre el diagrama y el código real puede provocar fallas catastróficas en entornos robóticos. Un robot que duda cuando debería moverse, o uno que entra en un bucle infinito durante una tarea sencilla, a menudo se debe a errores fundamentales en la arquitectura de la máquina de estados.
Construir software embebido confiable exige más que dibujar cajas y flechas. Requiere una comprensión profunda del flujo de ejecución, el tiempo y la gestión de recursos. Esta guía examina los peligros específicos que comprometen las máquinas de estados robóticas. Al identificar estas debilidades estructurales, los desarrolladores pueden asegurar que sus sistemas operen con la estabilidad necesaria para su despliegue en el mundo real.
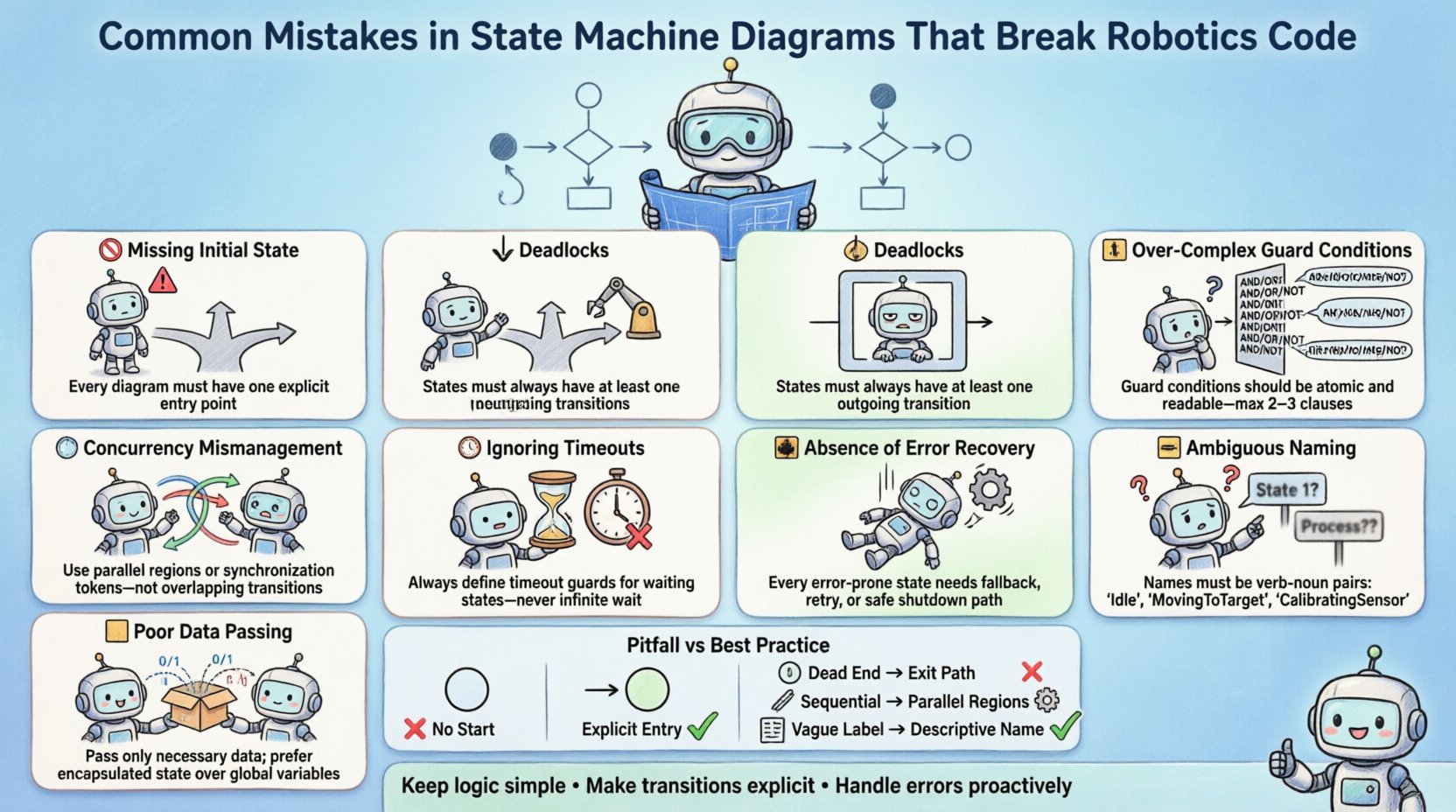
1. 🚫 El estado inicial ausente
La base de cualquier máquina de estados finita (FSM) es el estado inicial. Este es el punto de entrada donde el sistema comienza su operación al encenderse o reiniciarse. Un error común al diagramar es omitir este punto de inicio o dejarlo ambiguo.
Cuando el código se genera a partir de un diagrama que carece de un estado de entrada definido, el entorno de tiempo de ejecución suele adoptar de forma predeterminada un estado arbitrario. En un contexto robótico, esto significa que el robot podría comenzar en un estado de “Movimiento” cuando debería estar en “Inactivo”. Esto puede provocar la activación inmediata de los actuadores, generando riesgos para la seguridad.
- Inicio no definido: El código asume que un estado existe sin verificar que sea el punto de entrada correcto.
- Problemas con el ciclo de alimentación: Al reiniciar, el robot podría conservar datos de la sesión anterior pero fallar al reiniciar la lógica de control.
- Lógica de inicialización: Sin un estado inicial dedicado, las secuencias de inicialización a menudo se distribuyen entre múltiples funciones de transición.
Cada máquina de estados robusta debe definir explícitamente la condición de entrada. Esto garantiza que los sensores estén calibrados, los actuadores estén frenados y el controlador lógico esté listo antes de que el robot acepte comandos externos.
2. ⏸️ Muertes por bloqueo y transiciones faltantes
Una muerte por bloqueo ocurre cuando un sistema entra en un estado desde el cual no es posible ninguna transición. En un diagrama, esto se ve como una caja sin flechas salientes. En código, esto se manifiesta como un cuelgue o congelamiento.
Los robots operan en entornos dinámicos. Si un sensor no reporta datos, el robot no debe detenerse indefinidamente. Una máquina de estados que espera una condición que nunca se cumple crea una muerte por bloqueo. Esto es particularmente peligroso en tareas de navegación, donde un robot podría esperar a que se despeje un camino bloqueado por un obstáculo.
Las causas comunes de muertes por bloqueo incluyen:
- Estados inaccesibles:Estados que se definen en el diagrama pero nunca se conectan con el flujo principal.
- Transiciones predeterminadas faltantes:Fallar al definir una transición de “captura de todo” para entradas inesperadas.
- Contradicciones lógicas:Condiciones de guarda que son mutuamente excluyentes, dejando sin camino posible.
Para prevenir esto, cada estado debe tener una ruta de salida definida. Si la condición esperada no se cumple dentro de un tiempo específico, el sistema debería pasar a un estado de tiempo de espera o de error en lugar de esperar para siempre.
3. 🔄 Mala gestión de la concurrencia
Los robots a menudo realizan múltiples tareas simultáneamente. Un dron podría necesitar estabilizar su vuelo mientras escanea obstáculos. Una máquina de estados secuencial simple no puede manejar esto. A veces los ingenieros intentan modelar la concurrencia mediante el anidamiento de estados, pero esto a menudo conduce a lógicas complejas y difíciles de mantener.
La verdadera concurrencia requiere regiones paralelas dentro de la máquina de estados. Si un diagrama muestra un único flujo para tareas paralelas, el código resultante probablemente las ejecute una tras otra. Esto introduce latencia que puede ser inaceptable para bucles de control de alta velocidad.
- Ejecución entrelazada:El procesamiento secuencial de tareas paralelas causa retrasos en operaciones críticas.
- Contención de recursos: Varios estados intentando acceder al mismo recurso de hardware simultáneamente sin sincronización.
- Explosión de estados: Intentar modelar cada combinación de tareas paralelas resulta en una explosión combinatoria de estados.
Una modelización adecuada implica identificar actividades independientes y asignarlas a regiones paralelas distintas. Esto permite al tiempo de ejecución programarlas de forma eficiente sin bloquearse mutuamente.
4. 🛑 Condiciones de guarda excesivamente complejas
Las condiciones de guarda son expresiones lógicas que determinan si una transición puede ocurrir. Aunque son esenciales para el control, hacerlas demasiado complejas oscurece el flujo lógico. Una condición de guarda que abarca cinco líneas de código es difícil de depurar y verificar.
En robótica, los sensores proporcionan datos ruidosos. Una condición de guarda que depende de múltiples lecturas de sensores simultáneamente es propensa a condiciones de carrera. Si un sensor se actualiza ligeramente antes que otro, la lógica podría evaluarse de forma diferente a la intencional.
Las condiciones de guarda complejas conducen a:
- Dependencias ocultas: El orden de evaluación importa, pero no es explícito en el diagrama.
- Dificultad de depuración: Cuando una transición no se activa, es difícil determinar qué parte de la condición falló.
- Bloat de código: La lógica compleja a menudo se duplica en múltiples transiciones.
Es mejor simplificar las condiciones de guarda. Mueva la lógica compleja a las acciones de entrada o salida de un estado. Esto mantiene las transiciones limpias y el diagrama de estados legible. Por ejemplo, en lugar de verificar el nivel de batería en cada transición, verifíquelo una sola vez al entrar en el estado «Baja Potencia».
5. ⏱️ Ignorar temporizadores y vigiladores
Los sistemas en tiempo real requieren conciencia del tiempo. Una máquina de estados que depende únicamente de desencadenantes de eventos es frágil. ¿Qué sucede si un evento nunca llega? El robot espera indefinidamente.
Implementar temporizadores es crucial para la resiliencia. Cada estado debe tener una duración máxima que puede permanecer activo. Si la condición de transición no se cumple, un temporizador activa un estado de respaldo.
- Vigiladores de hardware: Mecanismos externos que reinician el sistema si el software se queda colgado.
- Temporizadores internos: Lógica dentro de la máquina de estados para imponer límites de tiempo en estados específicos.
- Señales de latido: Asegurando que el bucle de control esté activo y respondiendo.
Sin temporizadores, un fallo temporal en un sensor puede bloquear al robot en su lugar. Un mecanismo de temporizador asegura que el sistema se recupere de forma adecuada y trate de reiniciarse o entrar en un modo seguro.
6. 🚨 Ausencia de estados de recuperación de errores
Muchos diagramas se enfocan únicamente en el «camino feliz». Muestran cómo funciona el robot cuando todo sale bien. Rara vez muestran cómo se comporta el robot cuando algo falla.
Los robots operan en entornos no estructurados. Las articulaciones pueden atascarse, los motores pueden sobrecalentarse o la comunicación puede interrumpirse. Sin estados de error explícitos, el sistema puede colapsar o comportarse de forma impredecible.
Una máquina de estados robusta incluye:
- Estados seguros: Un estado designado en el que el robot detiene todo movimiento y espera una intervención.
- Lógica de recuperación: Pasos realizados para intentar restablecer el sistema automáticamente.
- Salidas de diagnóstico: Registro de códigos de error específicos para ayudar a los ingenieros a identificar la causa raíz.
Ignorar los estados de error traslada la responsabilidad del manejo de fallos a la capa de generación de código, que a menudo carece del contexto necesario para manejar eficazmente casos extremos.
7. 📦 Mecanismos deficientes de paso de datos
Los datos fluyen a través de una máquina de estados mediante transiciones. Cuando un robot pasa de «Acercándose» a «Agarrando», necesita pasar las coordenadas del objetivo. Si el diagrama de la máquina de estados no define claramente cómo se pasan los datos, el código tendrá dificultades.
Los problemas comunes incluyen:
- Variables globales:Depender de la memoria compartida sin sincronización conduce a condiciones de carrera.
- Parámetros faltantes:Transiciones definidas sin el contexto de datos necesario.
- Latencia de datos:Pasar datos que ya están desactualizados cuando se entra en el estado.
Los parámetros deben definirse explícitamente en las transiciones. Esto garantiza que el estado receptor tenga exactamente la información que necesita en el momento de entrada. También hace que el diagrama sea auto-documentado respecto a las dependencias de datos.
8. 🏷️ Convenciones ambiguas de nombrado de estados
Los nombres en una máquina de estados son la interfaz principal para depurar. Nombres ambiguos como «Estado 1» o «Proceso» no ofrecen ninguna información sobre el estado del sistema. En un robot complejo, un ingeniero necesita mirar un registro y saber de inmediato qué está haciendo el sistema.
Las buenas convenciones de nombrado deben ser:
- Descriptivas:«Wheel_Motor_On» es mejor que «Run».
- Consistentes:Utilice el mismo tiempo verbal y estructura de sustantivo en todos los estados.
- Únicas:Evite nombres que se parezcan, como «Error» y «Error_Handler».
Un nombrado consistente reduce la carga cognitiva al revisar código o registros. También ayuda a las herramientas automatizadas a generar una mejor documentación y casos de prueba basados en el modelo.
Tabla: Peligros comunes frente a mejores prácticas
| Área | Peligro | Mejor práctica |
|---|---|---|
| Punto de entrada | No se ha definido un estado inicial | Punto de entrada explícito con lógica de inicialización |
| Control de flujo | Muertes vivas debido a transiciones faltantes | Asegúrese de que cada estado tenga una ruta de salida |
| Paralelismo | Procesamiento secuencial de tareas paralelas | Use regiones paralelas para actividades independientes |
| Lógica | Condiciones de guarda complejas | Mueva la lógica a las acciones de estado, mantenga las condiciones de guarda simples |
| Tiempo | Sin temporizadores en estados de espera | Implemente vigilantes y temporizadores internos |
| Fiabilidad | Estados de error faltantes | Defina explícitamente los estados seguros y de recuperación |
| Datos | Compartición implícita de datos globales | Pase datos explícitamente mediante parámetros de transición |
| Documentación | Nombres de estado ambiguos | Use convenciones de nombrado descriptivas y consistentes |
Consideraciones de implementación
Una vez que el diagrama está finalizado, la traducción al código requiere cuidado. El modelo debe guiar la implementación, no al revés. Modificar el código para evadir una restricción de máquina de estados con frecuencia conduce a deuda técnica.
Los generadores de código pueden ayudar a cerrar esta brecha. Garantizan que el tiempo de ejecución coincida exactamente con el diseño. Sin embargo, depender únicamente de la generación sin comprender la lógica subyacente es arriesgado. Los ingenieros deben poder leer el código generado y verificar que coincida con la intención del diagrama.
Prueba de la máquina de estados
Las pruebas unitarias son vitales. Cada estado y transición debe verificarse de forma independiente. Las pruebas de integración aseguran que los cambios de estado no causen efectos secundarios en otras partes del sistema.
- Prueba de transición: Verifique que entradas específicas desencadenen los cambios de estado correctos.
- Verificación de estado:Asegúrese de que el sistema permanezca en un estado hasta que ocurra una condición de salida válida.
- Pruebas de estrés:Ejecute el sistema bajo carga para verificar problemas de temporización o condiciones de carrera.
Los entornos de simulación permiten probar de forma segura los modos de fallo. Los ingenieros pueden introducir fallos en sensores o retrasos en la comunicación para ver cómo responde la máquina de estados sin arriesgar el hardware.
El costo de una mala modelización
Corregir una máquina de estados en el diagrama es barato. Corregirla en código desplegado es costoso. En robótica, un error lógico puede significar daños físicos al robot o al entorno. También puede significar lesiones a los operadores.
Invertir tiempo en un proceso de diseño riguroso se traduce en estabilidad. Una máquina de estados bien documentada sirve como la única fuente de verdad para todo el equipo de desarrollo. Permite una mejor colaboración entre ingenieros de hardware y software.
Resumen de los puntos clave
Construir código de robótica confiable comienza con un modelo sólido. Evitar errores comunes como estados iniciales faltantes, bloqueos (deadlocks) y un manejo deficiente de la concurrencia es esencial. Un manejo robusto de errores y mecanismos claros de paso de datos garantizan que el sistema pueda recuperarse de condiciones inesperadas.
Al adherirse a estos principios, los desarrolladores pueden crear máquinas de estados que no solo sean funcionales, sino también resilientes. La diferencia entre un prototipo y un producto radica a menudo en la calidad de la lógica de control. La atención al detalle en la fase de diseño previene problemas en la fase de despliegue.
Mantenga la lógica simple. Haga explícitas las transiciones. Maneje los errores de forma proactiva. Estas prácticas forman la base de los sistemas robóticos confiables.
