











स्वायत्त प्रणालियों के नियंत्रण तर्क को डिज़ाइन करने के लिए सटीकता की आवश्यकता होती है। जब � ingineers अवधारणा से कार्यान्वयन में जाते हैं, तो संयुक्त मॉडलिंग भाषा (UML) स्टेट मशीन डायग्राम अक्सर नक्शा के रूप में काम करता है। हालांकि, डायग्राम और वास्तविक कोड के बीच असंगति रोबोटिक परिस्थितियों में विनाशकारी विफलताओं की ओर जा सकती है। जब वह आगे बढ़ना चाहिए तो रुकने वाला रोबोट, या एक सरल कार्य के दौरान अनंत लूप में प्रवेश करने वाला रोबोट, अक्सर स्टेट मशीन वास्तुकला में मूल त्रुटियों से उत्पन्न होता है।
भरोसेमंद एम्बेडेड सॉफ्टवेयर बनाने के लिए बस बॉक्स और तीर बनाने से अधिक आवश्यकता होती है। इसके लिए निष्पादन प्रवाह, समय और संसाधन प्रबंधन की गहन समझ की आवश्यकता होती है। यह मार्गदर्शिका रोबोटिक स्टेट मशीन को कमजोर करने वाले विशिष्ट जाल में निरीक्षण करती है। इन संरचनात्मक कमजोरियों की पहचान करके, विकासकर्ता यह सुनिश्चित कर सकते हैं कि उनकी प्रणालियाँ वास्तविक दुनिया में लागू करने के लिए आवश्यक स्थिरता के साथ काम करें।
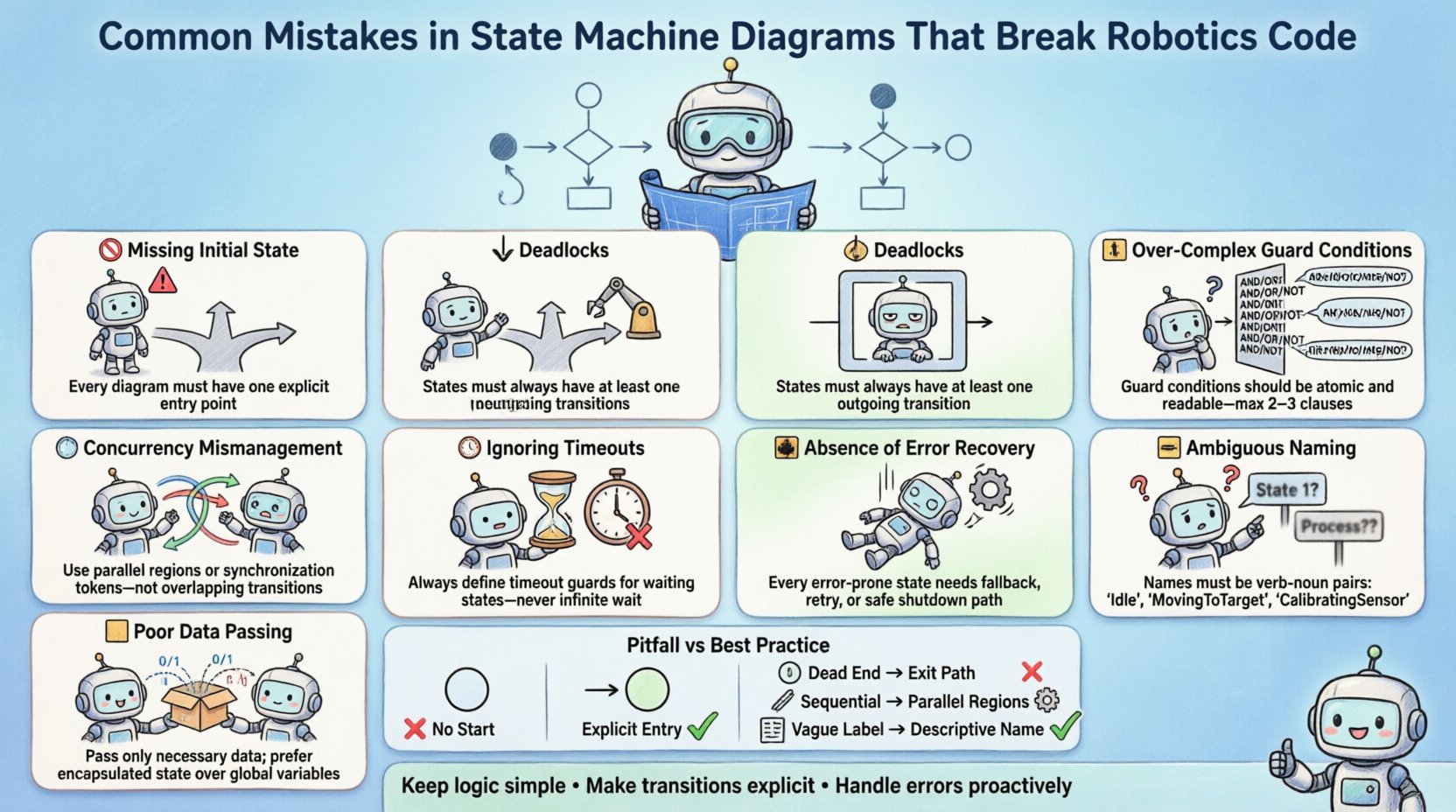
1. 🚫 अनुपस्थित प्रारंभिक अवस्था
किसी भी परिमित स्टेट मशीन (FSM) का आधार प्रारंभिक अवस्था है। यह वह प्रवेश बिंदु है जहां प्रणाली बिजली चालू होने या रीसेट होने पर अपना संचालन शुरू करती है। डायग्राम बनाते समय आम त्रुटि इस प्रारंभिक बिंदु को छोड़ देना या उसे अस्पष्ट छोड़ देना है।
जब कोड एक ऐसे डायग्राम से उत्पन्न किया जाता है जिसमें परिभाषित प्रवेश अवस्था नहीं होती है, तो रनटाइम परिवेश अक्सर एक अनिश्चित अवस्था पर डिफ़ॉल्ट हो जाता है। रोबोटिक परिस्थितियों में इसका मतलब यह हो सकता है कि रोबोट को “मूविंग” अवस्था में शुरू होना चाहिए, लेकिन वह “आइडल” अवस्था में शुरू होता है। इससे तुरंत एक्चुएटर सक्रिय हो सकता है, जिससे सुरक्षा जोखिम उत्पन्न हो सकता है।
- अपरिभाषित प्रारंभ: कोड एक अवस्था के अस्तित्व को मान लेता है बिना जांचे कि यह सही प्रवेश बिंदु है या नहीं।
- पावर साइकिल समस्याएं: रीबूट के दौरान, रोबोट पिछले सत्र से डेटा को बनाए रख सकता है, लेकिन नियंत्रण तर्क को रीसेट नहीं कर पाता है।
- प्रारंभिक तर्क: एक निर्दिष्ट प्रारंभिक अवस्था के बिना, प्रारंभिक क्रम को अक्सर कई संक्रमण फ़ंक्शनों में बिखरा दिया जाता है।
हर बलवान स्टेट मशीन को स्पष्ट रूप से प्रवेश शर्त को परिभाषित करना चाहिए। इससे यह सुनिश्चित होता है कि सेंसर कैलिब्रेट किए गए हैं, एक्चुएटर ब्रेक किए गए हैं, और तर्क नियंत्रक बाहरी आदेशों को स्वीकार करने से पहले तैयार हो जाए।
2. ⏸️ डेडलॉक और अनुपस्थित संक्रमण
एक डेडलॉक तब होता है जब कोई प्रणाली एक अवस्था में प्रवेश करती है जिससे कोई संक्रमण संभव नहीं है। डायग्राम में, इसे एक ऐसे बॉक्स के रूप में दिखाया जाता है जिसके बाहर तीर नहीं हैं। कोड में, इसका प्रभाव लटकाव या जमाव के रूप में दिखाई देता है।
रोबोट गतिशील परिस्थितियों में काम करते हैं। यदि कोई सेंसर डेटा रिपोर्ट करने में विफल हो जाता है, तो रोबोट को अनंत समय तक रुकना नहीं चाहिए। एक ऐसी स्टेट मशीन जो एक ऐसी स्थिति का इंतजार करती है जो कभी नहीं आती है, एक डेडलॉक बनाती है। यह नेविगेशन कार्यों में विशेष रूप से खतरनाक है, जहां रोबोट एक मार्ग के साफ होने का इंतजार कर सकता है जो एक बाधा द्वारा रोक दिया गया है।
डेडलॉक के आम कारणों में शामिल हैं:
- पहुंच नहीं वाली अवस्थाएं:वे अवस्थाएं जो डायग्राम में परिभाषित की गई हैं लेकिन कभी मुख्य प्रवाह से जुड़ी नहीं हैं।
- अनुपस्थित डिफ़ॉल्ट संक्रमण:अप्रत्याशित इनपुट के लिए एक “सभी को ग्रहण करने वाला” संक्रमण को परिभाषित करने में विफलता।
- तार्किक विरोधाभास:गार्ड शर्तें जो परस्पर अपवर्जक हैं, जिससे आगे बढ़ने का कोई रास्ता नहीं रहता है।
इससे बचने के लिए, प्रत्येक अवस्था को एक परिभाषित निकास मार्ग होना चाहिए। यदि अपेक्षित स्थिति एक निश्चित समय सीमा के भीतर पूरी नहीं होती है, तो प्रणाली को कभी न रुकने वाले इंतजार के बजाय समय सीमा समाप्त होने या त्रुटि अवस्था में संक्रमण करना चाहिए।
3. 🔄 समानांतरता का गलत प्रबंधन
रोबोट अक्सर एक साथ कई कार्य करते हैं। एक ड्रोन को बाधाओं की जांच करते हुए अपनी उड़ान को स्थिर करने की आवश्यकता हो सकती है। एक सरल अनुक्रमिक स्टेट मशीन इसे संभाल नहीं सकती है। इंजीनियर कभी-कभी समानांतरता को निरूपित करने के लिए अवस्थाओं को एक दूसरे में निर्मित करने की कोशिश करते हैं, लेकिन यह अक्सर जटिल, रखरखाव में कठिन तर्क की ओर जाता है।
सच्ची समानांतरता के लिए स्टेट मशीन के भीतर समानांतर क्षेत्रों की आवश्यकता होती है। यदि डायग्राम समानांतर कार्यों के लिए एकल प्रवाह दिखाता है, तो परिणामस्वरूप कोड उन्हें एक के बाद एक निष्पादित करेगा। इससे लेटेंसी आती है जो उच्च गति नियंत्रण लूप के लिए अस्वीकार्य हो सकती है।
- अंतर्विष्ट निष्पादन:समानांतर कार्यों के अनुक्रमिक प्रसंस्करण महत्वपूर्ण संचालन में देरी उत्पन्न करता है।
- संसाधन प्रतिस्पर्धा: एक ही हार्डवेयर संसाधन को सिंक्रनाइजेशन के बिना एक साथ कई राज्यों के द्वारा एक साथ प्राप्त करने की कोशिश करना।
- राज्य विस्फोट: समानांतर कार्यों के हर संयोजन को मॉडल करने की कोशिश करने से राज्यों का संयोजक विस्फोट होता है।
सही मॉडलिंग में स्वतंत्र गतिविधियों की पहचान करना और उन्हें अलग-अलग समानांतर क्षेत्रों में निर्धारित करना शामिल है। इससे रनटाइम को उन्हें ब्लॉक किए बिना कुशलतापूर्वक योजना बनाने में सक्षम बनाता है।
4. 🛑 अत्यधिक जटिल गार्ड शर्तें
गार्ड शर्तें तार्किक व्यंजक होती हैं जो तय करती हैं कि क्या एक संक्रमण हो सकता है। नियंत्रण के लिए आवश्यक होने के बावजूद, इन शर्तों को बहुत जटिल बनाने से तार्किक प्रवाह धुंधला हो जाता है। पांच पंक्तियों के कोड में फैली गार्ड शर्त को डीबग और सत्यापित करना मुश्किल होता है।
रोबोटिक्स में, सेंसर शोर डेटा प्रदान करते हैं। एक गार्ड शर्त जो एक साथ कई सेंसर के ब्लॉक पर निर्भर हो, रेस कंडीशन के लिए अधिक संवेदनशील होती है। यदि एक सेंसर दूसरे से थोड़ा पहले अपडेट हो जाता है, तो तर्क अपेक्षित तरीके से मूल्यांकन नहीं हो सकता है।
जटिल गार्ड निम्न कारणों से जुड़े होते हैं:
- छिपे हुए निर्भरताएं: मूल्यांकन का क्रम महत्वपूर्ण होता है, लेकिन आरेख में स्पष्ट नहीं होता है।
- डीबगिंग में कठिनाई: जब कोई संक्रमण ट्रिगर नहीं होता है, तो यह निर्धारित करना मुश्किल होता है कि शर्त का कौन सा हिस्सा विफल हुआ।
- कोड ब्लाट: जटिल तर्क अक्सर कई संक्रमणों में दोहराया जाता है।
गार्ड शर्तों को सरल बनाना बेहतर है। जटिल तर्क को एक राज्य के प्रवेश या निकास कार्य में स्थानांतरित करें। इससे संक्रमण साफ रहते हैं और राज्य आरेख पढ़ने योग्य बना रहता है। उदाहरण के लिए, हर संक्रमण पर बैटरी स्तर की जांच करने के बजाय, बस “लो पावर” राज्य में प्रवेश करते ही एक बार जांच करें।
5. ⏱️ टाइमआउट और वॉचडॉग्स को नजरअंदाज करना
रियल-टाइम प्रणालियों को समय की जागरूकता की आवश्यकता होती है। केवल इवेंट ट्रिगर पर निर्भर एक राज्य मशीन नाजुक होती है। यदि कोई इवेंट कभी नहीं आता है, तो क्या होता है? रोबोट अनंतकाल तक इंतजार करता है।
टाइमआउट को लागू करना लचीलेपन के लिए निर्णायक है। प्रत्येक राज्य के एक अधिकतम अवधि होनी चाहिए जिस तक वह सक्रिय रह सकता है। यदि संक्रमण शर्त पूरी नहीं होती है, तो एक टाइमर फॉलबैक राज्य को ट्रिगर करता है।
- हार्डवेयर वॉचडॉग्स: बाहरी तंत्र जो सॉफ्टवेयर फंस जाने पर प्रणाली को रीसेट करते हैं।
- आंतरिक टाइमर: राज्य मशीन के भीतर तार्किक बातें जो विशिष्ट राज्यों पर समय सीमा लागू करती हैं।
- हृदय धड़कन संकेत: यह सुनिश्चित करना कि नियंत्रण लूप सक्रिय और प्रतिक्रियाशील है।
टाइमआउट के बिना, अस्थायी सेंसर गलती रोबोट को जगह पर फंसा सकती है। एक टाइमआउट तंत्र सुनिश्चित करता है कि प्रणाली धीरे-धीरे ठीक हो जाए और रीसेट करने या सुरक्षित मोड में प्रवेश करने की कोशिश करे।
6. 🚨 त्रुटि पुनर्स्थापन राज्यों की अनुपस्थिति
बहुत से आरेख केवल “खुशहाल रास्ते” पर ध्यान केंद्रित करते हैं। वे दिखाते हैं कि रोबोट कैसे काम करता है जब सब कुछ सही जाता है। वे दुर्घटना के समय रोबोट कैसे व्यवहार करता है, यह दिखाने के लिए बहुत कम बार दिखाते हैं।
रोबोट असंरचित वातावरण में काम करते हैं। जॉइंट्स फंस सकते हैं, मोटर्स ओवरहीट हो सकती हैं, या संचार गिर सकता है। स्पष्ट त्रुटि राज्यों के बिना, प्रणाली क्रैश हो सकती है या अप्रत्याशित तरीके से व्यवहार कर सकती है।
एक टिकाऊ राज्य मशीन में शामिल है:
- सुरक्षित राज्य: एक निर्धारित अवस्था जहां रोबोट सभी गतिविधियों को रोक देता है और हस्तक्षेप के लिए प्रतीक्षा करता है।
- पुनर्स्थापना तर्क: स्वचालित रूप से प्रणाली को पुनर्स्थापित करने की कोशिश करने के लिए उठाए गए चरण।
- निदान आउटपुट: इंजीनियरों को मूल कारण की पहचान करने में सहायता करने के लिए विशिष्ट त्रुटि कोड को लॉग करना।
त्रुटि अवस्थाओं को नजरअंदाज करना विफलता प्रबंधन के बोझ को कोड उत्पादन परत पर स्थानांतरित कर देता है, जो अक्सर किनारे के मामलों को प्रभावी ढंग से संभालने के लिए संदर्भ की कमी के कारण होता है।
7. 📦 खराब डेटा पासिंग तंत्र
डेटा संक्रमण के माध्यम से एक अवस्था मशीन के माध्यम से प्रवाहित होता है। जब रोबोट “प्राप्त करने वाला” से “पकड़ने वाला” अवस्था में जाता है, तो इसे लक्ष्य निर्देशांक पारित करने की आवश्यकता होती है। यदि अवस्था मशीन आरेख स्पष्ट रूप से डेटा के पारित होने के तरीके को परिभाषित नहीं करता है, तो कोड को कठिनाई होगी।
आम समस्याएं इस प्रकार हैं:
- ग्लोबल चर:सिंक्रनाइजेशन के बिना साझा मेमोरी पर निर्भर होना रेस कंडीशन का कारण बनता है।
- अनुपस्थित पैरामीटर्स:आवश्यक डेटा संदर्भ के बिना परिवर्तन परिभाषित करना।
- डेटा लेटेंसी: अवस्था में प्रवेश के समय जो डेटा अप्रचलित हो चुका होता है, उसे पारित करना।
पैरामीटर्स को संक्रमण पर स्पष्ट रूप से परिभाषित किया जाना चाहिए। इससे यह सुनिश्चित होता है कि प्राप्त करने वाली अवस्था प्रवेश के क्षण पर आवश्यक सटीक जानकारी प्राप्त करती है। इसके अलावा यह आरेख को डेटा निर्भरता के संबंध में स्वयं दस्तावेजीकृत बनाता है।
8. 🏷️ अस्पष्ट अवस्था नामकरण प्रथाएं
अवस्था मशीन में नाम डीबगिंग के लिए मुख्य इंटरफेस होते हैं। “अवस्था 1” या “प्रक्रिया” जैसे अस्पष्ट नाम प्रणाली की स्थिति के बारे में कोई जानकारी नहीं देते हैं। एक जटिल रोबोट में, एक इंजीनियर को लॉग को देखकर तुरंत यह जानने की आवश्यकता होती है कि प्रणाली क्या कर रही है।
अच्छी नामकरण प्रथाएं इस प्रकार होनी चाहिए:
- वर्णनात्मक: “Wheel_Motor_On” को “Run” की तुलना में बेहतर है।
- संगत: सभी अवस्थाओं में समान क्रिया काल और संज्ञा संरचना का उपयोग करें।
- विशिष्ट: ऐसे नामों से बचें जो एक जैसे लगते हैं, जैसे “Error” और “Error_Handler”।
संगत नामकरण कोड या लॉग की समीक्षा करते समय संज्ञानात्मक भार को कम करता है। इसके अलावा यह स्वचालित उपकरणों को मॉडल के आधार पर बेहतर दस्तावेजीकरण और परीक्षण मामलों के निर्माण में सहायता करता है।
तालिका: आम त्रुटियां बनाम उत्तम व्यवहार
| क्षेत्र | त्रुटि | उत्तम व्यवहार |
|---|---|---|
| प्रवेश बिंदु | कोई प्रारंभिक अवस्था परिभाषित नहीं है | प्रारंभिक तरीके से प्रवेश बिंदु जिसमें प्रारंभिक संचालन तर्क है |
| प्रवाह नियंत्रण | अनुपस्थित संक्रमणों के कारण अवरोध | सुनिश्चित करें कि प्रत्येक अवस्था का निकास मार्ग हो |
| समानांतरता | समानांतर कार्यों का श्रृंखलाबद्ध प्रसंस्करण | स्वतंत्र गतिविधियों के लिए समानांतर क्षेत्रों का उपयोग करें |
| तर्क | जटिल गार्ड स्थितियां | तर्क को अवस्था क्रियाओं में स्थानांतरित करें, गार्ड को सरल रखें |
| समय सीमा | प्रतीक्षा अवस्थाओं पर कोई समय सीमा नहीं है | वॉचडॉग और आंतरिक टाइमर कार्यान्वित करें |
| विश्वसनीयता | अनुपस्थित त्रुटि अवस्थाएं | सुरक्षित और पुनर्स्थापन अवस्थाओं को स्पष्ट रूप से परिभाषित करें |
| डेटा | अप्रत्यक्ष सामान्य डेटा साझाकरण | संक्रमण पैरामीटरों के माध्यम से डेटा को स्पष्ट रूप से पारित करें |
| दस्तावेज़ीकरण | अस्पष्ट अवस्था नाम | वर्णनात्मक, संगत नामकरण प्रणाली का उपयोग करें |
कार्यान्वयन पर विचार
जब आरेख को अंतिम रूप दे दिया जाता है, तो कोड में अनुवाद करने के लिए सावधानी बरतने की आवश्यकता होती है। मॉडल को कार्यान्वयन को निर्देशित करना चाहिए, न कि विपरीत दिशा में। अवस्था मशीन की सीमा को बचाने के लिए कोड में परिवर्तन करने से अक्सर तकनीकी देनदारी उत्पन्न होती है।
कोड जनरेटर इस अंतर को पार करने में मदद कर सकते हैं। वे सुनिश्चित करते हैं कि रनटाइम डिज़ाइन के बिल्कुल मेल खाता है। हालांकि, नीचे के तर्क को समझे बिना सिर्फ उत्पादन पर भरोसा करना जोखिम भरा है। इंजीनियरों को उत्पन्न कोड को पढ़ने और यह सत्यापित करने में सक्षम होना चाहिए कि यह आरेख के उद्देश्य से मेल खाता है।
अवस्था मशीन का परीक्षण
यूनिट परीक्षण बहुत महत्वपूर्ण है। प्रत्येक अवस्था और संक्रमण को स्वतंत्र रूप से सत्यापित किया जाना चाहिए। एकीकरण परीक्षण सुनिश्चित करता है कि अवस्था परिवर्तन प्रणाली के अन्य भागों में अनचाहे प्रभाव नहीं डालते।
- संक्रमण परीक्षण: सुनिश्चित करें कि विशिष्ट इनपुट उचित अवस्था परिवर्तन को ट्रिगर करें।
- अवस्था सत्यापन: सुनिश्चित करें कि प्रणाली एक अवस्था में तब तक रहे जब तक एक वैध निकास स्थिति नहीं आती।
- तनाव परीक्षण: समय समस्याओं या दौड़ स्थितियों की जांच के लिए प्रणाली को भार के तहत चलाएं।
सिमुलेशन वातावरण विफलता मोड के सुरक्षित परीक्षण की अनुमति देते हैं। इंजीनियर सेंसर विफलताओं या संचार देरी को शामिल कर सकते हैं ताकि अवस्था मशीन कैसे प्रतिक्रिया करती है, बिना हार्डवेयर के जोखिम के देख सकें।
खराब मॉडलिंग की कीमत
आरेख में एक अवस्था मशीन को ठीक करना सस्ता है। निर्मित कोड में इसे ठीक करना महंगा है। रोबोटिक्स में, एक तर्क त्रुटि रोबोट या वातावरण को भौतिक क्षति का अर्थ हो सकता है। इसका अर्थ ऑपरेटरों को चोट भी हो सकती है।
एक कठोर डिजाइन प्रक्रिया में समय निवेश करने से स्थिरता में लाभ मिलता है। अच्छी तरह से दस्तावेजीकृत अवस्था मशीन पूरी विकास टीम के लिए एकमात्र सच्चाई का स्रोत के रूप में कार्य करती है। यह हार्डवेयर और सॉफ्टवेयर इंजीनियरों के बीच बेहतर सहयोग की अनुमति देती है।
मुख्य बातों का सारांश
विश्वसनीय रोबोटिक्स कोड बनाना एक ठोस मॉडल से शुरू होता है। गायब प्रारंभिक अवस्थाओं, डेडलॉक्स और खराब समानांतरता के निपटान के जैसी आम गलतियों से बचना आवश्यक है। मजबूत त्रुटि संभाल और स्पष्ट डेटा पारगमन तंत्र सुनिश्चित करते हैं कि प्रणाली अप्रत्याशित स्थितियों से बच सके।
इन सिद्धांतों का पालन करके विकासकर्ता अवस्था मशीनें बना सकते हैं जो केवल कार्यात्मक नहीं, बल्कि लचीली हों। प्रोटोटाइप और उत्पाद के बीच अंतर अक्सर नियंत्रण तर्क की गुणवत्ता में होता है। डिजाइन चरण में विवरणों पर ध्यान देने से निर्माण चरण में दुख को रोका जा सकता है।
तर्क को सरल रखें। संक्रमण को स्पष्ट बनाएं। त्रुटियों का सक्रिय रूप से निपटाएं। इन अभ्यासों को विश्वसनीय रोबोटिक प्रणालियों का आधार बनाते हैं।
