











Projetar lógica de controle para sistemas autônomos exige precisão. Quando engenheiros passam do conceito para a implementação, o diagrama de máquina de estados da Linguagem Unificada de Modelagem (UML) frequentemente serve como o projeto. No entanto, uma desconexão entre o diagrama e o código real pode levar a falhas catastróficas em ambientes robóticos. Um robô que hesita quando deveria se mover, ou um que entra em um loop infinito durante uma tarefa simples, geralmente decorre de erros fundamentais na arquitetura da máquina de estados.
Construir software embarcado confiável exige mais do que desenhar caixas e setas. Exige um profundo entendimento do fluxo de execução, tempo e gerenciamento de recursos. Este guia analisa os perigos específicos que comprometem as máquinas de estados robóticas. Ao identificar essas fraquezas estruturais, os desenvolvedores podem garantir que seus sistemas operem com a estabilidade necessária para implantação no mundo real.
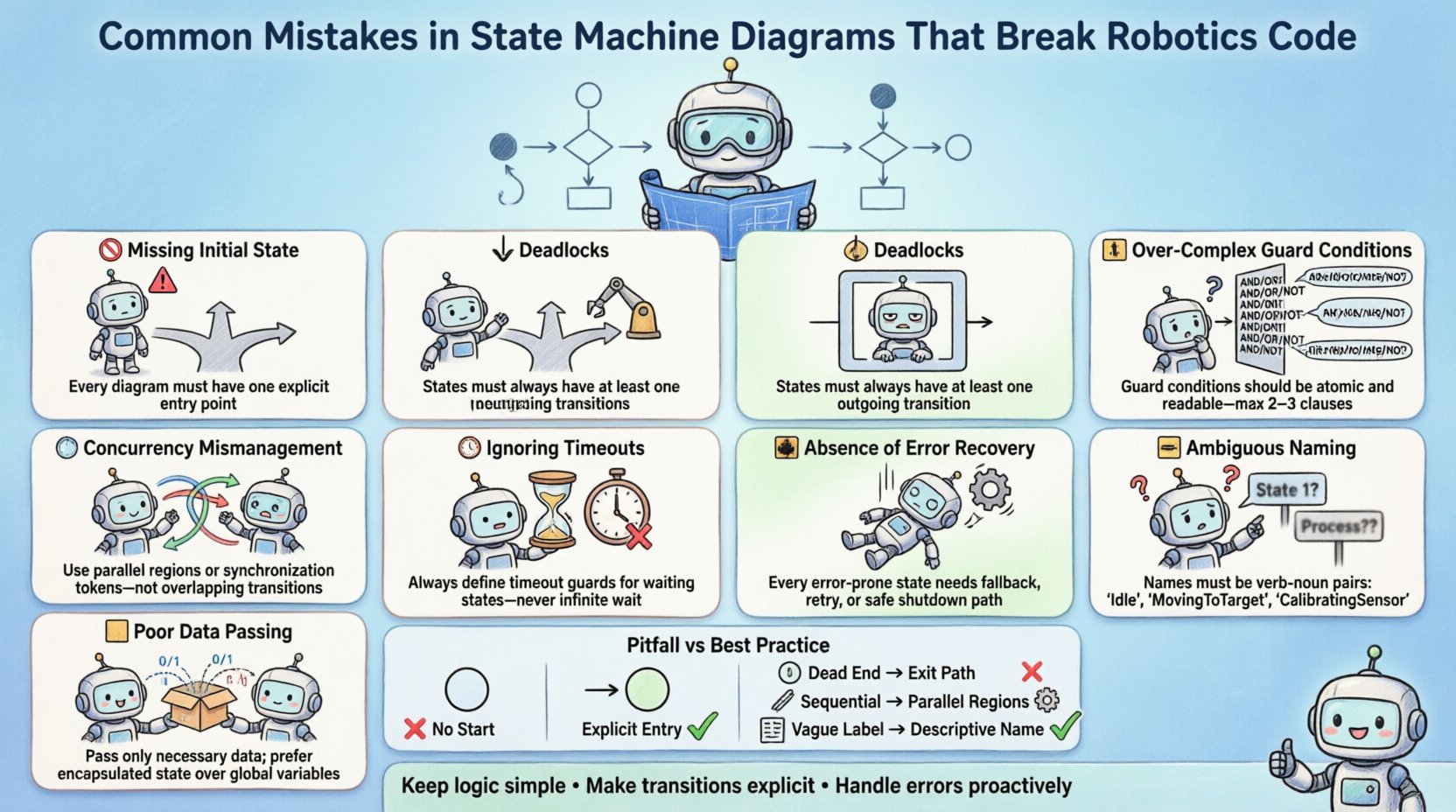
1. 🚫 O Estado Inicial Ausente
A base de qualquer máquina de estados finita (FSM) é o estado inicial. Este é o ponto de entrada onde o sistema começa sua operação ao ligar ou reiniciar. Um erro comum na modelagem é omitir esse ponto de partida ou deixá-lo ambíguo.
Quando o código é gerado a partir de um diagrama que não possui um estado de entrada definido, o ambiente de execução frequentemente assume um estado arbitrário. Em um contexto robótico, isso significa que o robô pode começar no estado “Movendo” quando deveria estar no estado “Parado”. Isso pode causar ativação imediata dos atuadores, levando a riscos de segurança.
- Início Não Definido: O código assume que um estado existe sem verificar se é o ponto de entrada correto.
- Problemas com Reinício de Energia: Ao reiniciar, o robô pode manter dados da sessão anterior, mas falhar em redefinir a lógica de controle.
- Lógica de Inicialização: Sem um estado inicial dedicado, as sequências de inicialização geralmente são espalhadas por várias funções de transição.
Toda máquina de estados robusta deve definir explicitamente a condição de entrada. Isso garante que os sensores sejam calibrados, os atuadores sejam travados e o controlador lógico esteja pronto antes que o robô aceite comandos externos.
2. ⏸️ Travações e Transições Ausentes
Uma travação ocorre quando um sistema entra em um estado do qual nenhuma transição é possível. Em um diagrama, isso parece uma caixa sem setas saindo. No código, isso se manifesta como uma travada ou congelamento.
Robôs operam em ambientes dinâmicos. Se um sensor falha em reportar dados, o robô não deve parar indefinidamente. Uma máquina de estados que espera por uma condição que nunca ocorre cria uma travação. Isso é particularmente perigoso em tarefas de navegação, onde um robô pode esperar por um caminho a ser liberado que está bloqueado por um obstáculo.
Causas comuns de travamentos incluem:
- Estados Inacessíveis:Estados definidos no diagrama, mas nunca conectados ao fluxo principal.
- Transições Padrão Ausentes:Falhar em definir uma transição “captura-tudo” para entradas inesperadas.
- Contradições Lógicas:Condições de guarda mutuamente exclusivas, deixando nenhum caminho possível.
Para prevenir isso, cada estado deve ter um caminho de saída definido. Se a condição esperada não for atendida dentro de um período específico, o sistema deverá transitar para um estado de tempo limite ou erro, em vez de esperar para sempre.
3. 🔄 Gestão Incorreta de Concorrência
Robôs frequentemente realizam múltiplas tarefas simultaneamente. Um drone pode precisar estabilizar seu voo enquanto escaneia obstáculos. Uma máquina de estados sequencial simples não consegue lidar com isso. Engenheiros às vezes tentam modelar concorrência aninhando estados, mas isso frequentemente leva a lógicas complexas e difíceis de manter.
A concorrência verdadeira exige regiões paralelas dentro da máquina de estados. Se um diagrama mostra um único fluxo para tarefas paralelas, o código resultante provavelmente executará essas tarefas uma após a outra. Isso introduz latência que pode ser inaceitável para loops de controle de alta velocidade.
- Execução Interleavada:O processamento sequencial de tarefas paralelas causa atrasos em operações críticas.
- Contenção de Recursos: Várias estados tentando acessar o mesmo recurso de hardware simultaneamente sem sincronização.
- Explosão de Estados: Tentar modelar cada combinação de tarefas paralelas resulta em uma explosão combinatória de estados.
Um modelamento adequado envolve identificar atividades independentes e atribuí-las a regiões paralelas distintas. Isso permite que o tempo de execução as agende de forma eficiente sem bloquear uma à outra.
4. 🛑 Condições de Guarda Excessivamente Complexas
Condições de guarda são expressões lógicas que determinam se uma transição pode ocorrer. Embora essenciais para o controle, torná-las excessivamente complexas obscurece o fluxo lógico. Uma condição de guarda que ocupa cinco linhas de código é difícil de depurar e verificar.
Na robótica, sensores fornecem dados ruidosos. Uma condição de guarda que depende de leituras simultâneas de múltiplos sensores está sujeita a condições de corrida. Se um sensor for atualizado ligeiramente antes de outro, a lógica pode ser avaliada de forma diferente do pretendido.
Guardas complexas levam a:
- Dependências Ocultas:A ordem de avaliação importa, mas não é explícita no diagrama.
- Dificuldade de Depuração: Quando uma transição falha em ser acionada, é difícil determinar qual parte da condição falhou.
- Bloat de Código:Lógica complexa frequentemente é duplicada em múltiplas transições.
É melhor simplificar as condições de guarda. Mova a lógica complexa para as ações de entrada ou saída de um estado. Isso mantém as transições limpas e o diagrama de estados legível. Por exemplo, em vez de verificar o nível da bateria em cada transição, faça isso apenas ao entrar no estado “Baixa Potência”.
5. ⏱️ Ignorar Tempo Limite e Watchdogs
Sistemas em tempo real exigem consciência do tempo. Uma máquina de estados que depende exclusivamente de gatilhos de eventos é frágil. O que acontece se um evento nunca chegar? O robô espera indefinidamente.
Implementar tempos limite é crucial para a resiliência. Cada estado deve ter uma duração máxima que pode permanecer ativo. Se a condição de transição não for atendida, um temporizador aciona um estado de fallback.
- Watchdogs de Hardware:Mecanismos externos que reiniciam o sistema se o software travar.
- Temporizadores Internos:Lógica dentro da máquina de estados para impor limites de tempo em estados específicos.
- Sinais de Batimento Cardíaco:Garantindo que o laço de controle esteja ativo e respondendo.
Sem tempos limite, um glitch temporário de sensor pode travar o robô no lugar. Um mecanismo de tempo limite garante que o sistema se recupere com segurança e tente reiniciar ou entrar em um modo seguro.
6. 🚨 Ausência de Estados de Recuperação de Erros
Muitos diagramas focam apenas no “caminho feliz”. Mostram como o robô funciona quando tudo dá certo. Raramente mostram como o robô se comporta quando algo falha.
Robôs operam em ambientes não estruturados. Juntas podem travar, motores podem superaquecer ou a comunicação pode cair. Sem estados de erro explícitos, o sistema pode travar ou se comportar de forma imprevisível.
Uma máquina de estados robusta inclui:
- Estados Seguros: Um estado designado em que o robô para todo o movimento e aguarda intervenção.
- Lógica de Recuperação: Etapas realizadas para tentar reiniciar o sistema automaticamente.
- Saídas de Diagnóstico: Registro de códigos de erro específicos para ajudar engenheiros a identificar a causa raiz.
Ignorar estados de erro transfere a responsabilidade pelo tratamento de falhas para a camada de geração de código, que muitas vezes carece do contexto necessário para lidar efetivamente com casos extremos.
7. 📦 Mecanismos Pobres de Passagem de Dados
Os dados fluem através de uma máquina de estados por meio de transições. Quando um robô passa de “Aproximando” para “Agarrando”, ele precisa passar as coordenadas alvo. Se o diagrama da máquina de estados não definir claramente como os dados são passados, o código terá dificuldades.
Problemas comuns incluem:
- Variáveis Globais:Depender da memória compartilhada sem sincronização leva a condições de corrida.
- Parâmetros Ausentes:Transições definidas sem o contexto de dados necessário.
- Latência de Dados:Passar dados que estão desatualizados no momento em que o estado é acessado.
Parâmetros devem ser explicitamente definidos nas transições. Isso garante que o estado receptor tenha exatamente as informações de que precisa no momento da entrada. Também torna o diagrama auto-documentado em relação às dependências de dados.
8. 🏷️ Convenções de Nomeação de Estados Ambíguas
Nomes em uma máquina de estados são a interface principal para depuração. Nomes vagos como “Estado 1” ou “Processo” não fornecem nenhuma informação sobre o estado do sistema. Em um robô complexo, um engenheiro precisa olhar para um registro e imediatamente saber o que o sistema está fazendo.
As boas convenções de nomeação devem ser:
- Descritivas: “Motor_Roda_Ligado” é melhor que “Ligar”.
- Consistentes: Use o mesmo tempo verbal e estrutura de substantivo em todos os estados.
- Únicas: Evite nomes que se pareçam, como “Erro” e “Tratador_Erro”.
A nomeação consistente reduz a carga cognitiva ao revisar código ou logs. Também ajuda ferramentas automatizadas a gerar documentação e casos de teste melhores com base no modelo.
Tabela: Armadilhas Comuns vs. Melhores Práticas
| Área | Armadilha | Melhor Prática |
|---|---|---|
| Ponto de Entrada | Nenhum estado inicial definido | Ponto de entrada explícito com lógica de inicialização |
| Controle de Fluxo | Travamentos devido a transições ausentes | Garanta que cada estado tenha um caminho de saída |
| Paralelismo | Processamento sequencial de tarefas paralelas | Use regiões paralelas para atividades independentes |
| Lógica | Condições de guarda complexas | Mova a lógica para ações de estado, mantenha as guardas simples |
| Temporização | Sem timeouts em estados de espera | Implemente watchdogs e temporizadores internos |
| Confiabilidade | Estados de erro ausentes | Defina estados seguros e de recuperação explicitamente |
| Dados | Compartilhamento implícito de dados globais | Passe dados explicitamente por meio de parâmetros de transição |
| Documentação | Nomes de estado ambíguos | Use convenções de nomeação descritivas e consistentes |
Considerações de Implementação
Uma vez que o diagrama for finalizado, a tradução para código exige cuidado. O modelo deve orientar a implementação, e não o contrário. Modificar o código para contornar uma restrição da máquina de estados frequentemente leva a dívida técnica.
Geradores de código podem ajudar a preencher essa lacuna. Eles garantem que o tempo de execução corresponda exatamente ao design. No entanto, depender exclusivamente da geração sem compreender a lógica subjacente é arriscado. Engenheiros devem ser capazes de ler o código gerado e verificar se ele corresponde à intenção do diagrama.
Testando a Máquina de Estados
O teste unitário é vital. Cada estado e transição deve ser verificado independentemente. O teste de integração garante que as mudanças de estado não causem efeitos colaterais em outras partes do sistema.
- Teste de Transição: Verifique se entradas específicas acionam as mudanças de estado corretas.
- Verificação de Estado:Garanta que o sistema permaneça em um estado até que uma condição de saída válida ocorra.
- Testes de Estresse:Execute o sistema sob carga para verificar problemas de tempo ou condições de corrida.
Ambientes de simulação permitem testes seguros de modos de falha. Engenheiros podem introduzir falhas de sensores ou atrasos de comunicação para ver como a máquina de estados reage sem colocar em risco o hardware.
O Custo de uma Modelagem Pobre
Corrigir uma máquina de estados no diagrama é barato. Corrigi-la no código implantado é caro. Em robótica, um erro lógico pode significar danos físicos ao robô ou ao ambiente. Também pode significar lesões aos operadores.
Investir tempo em um processo de design rigoroso se traduz em estabilidade. Uma máquina de estados bem documentada serve como a única fonte de verdade para toda a equipe de desenvolvimento. Permite uma melhor colaboração entre engenheiros de hardware e software.
Resumo dos Principais Pontos
Construir código confiável para robótica começa com um modelo sólido. Evitar armadilhas comuns, como estados iniciais ausentes, bloqueios (deadlocks) e tratamento inadequado de concorrência, é essencial. Um tratamento robusto de erros e mecanismos claros de passagem de dados garantem que o sistema possa se recuperar de condições inesperadas.
Ao seguir esses princípios, os desenvolvedores podem criar máquinas de estados que não são apenas funcionais, mas resilientes. A diferença entre um protótipo e um produto muitas vezes reside na qualidade da lógica de controle. A atenção aos detalhes na fase de design evita problemas na fase de implantação.
Mantenha a lógica simples. Torne as transições explícitas. Trate erros de forma proativa. Essas práticas formam a base dos sistemas robóticos confiáveis.
