











Thiết kế logic điều khiển cho các hệ thống tự động đòi hỏi sự chính xác. Khi các kỹ sư chuyển từ ý tưởng sang triển khai, sơ đồ máy trạng thái theo Ngôn ngữ mô hình hóa thống nhất (UML) thường đóng vai trò là bản vẽ thiết kế. Tuy nhiên, sự thiếu kết nối giữa sơ đồ và mã thực tế có thể dẫn đến những sự cố nghiêm trọng trong môi trường robot. Một robot dừng lại khi cần di chuyển, hoặc một robot rơi vào vòng lặp vô hạn trong một nhiệm vụ đơn giản, thường xuất phát từ những lỗi cơ bản trong kiến trúc máy trạng thái.
Xây dựng phần mềm nhúng đáng tin cậy đòi hỏi hơn cả việc vẽ các hình hộp và mũi tên. Nó đòi hỏi sự hiểu biết sâu sắc về luồng thực thi, thời gian và quản lý tài nguyên. Hướng dẫn này phân tích những điểm nguy hiểm cụ thể làm suy yếu các máy trạng thái robot. Bằng cách xác định những điểm yếu cấu trúc này, các nhà phát triển có thể đảm bảo hệ thống của họ hoạt động ổn định, đáp ứng yêu cầu triển khai thực tế.
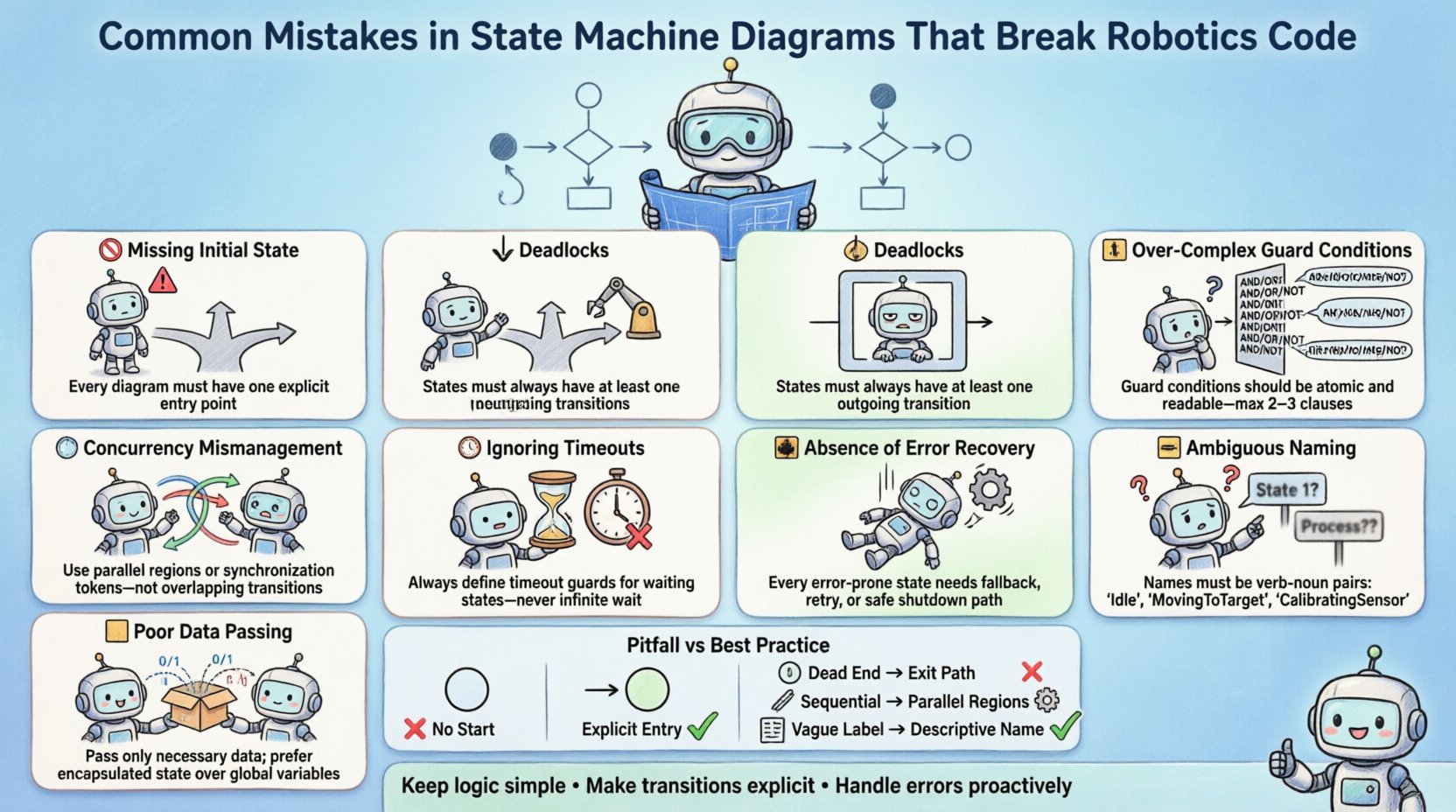
1. 🚫 Trạng thái khởi tạo bị thiếu
Nền tảng của bất kỳ máy trạng thái hữu hạn (FSM) nào là trạng thái khởi tạo. Đây là điểm vào nơi hệ thống bắt đầu hoạt động khi bật nguồn hoặc khởi động lại. Một lỗi phổ biến khi vẽ sơ đồ là bỏ qua điểm khởi đầu này hoặc để nó mơ hồ.
Khi mã được sinh ra từ sơ đồ không có trạng thái đầu vào được xác định, môi trường chạy thường mặc định vào một trạng thái tùy ý. Trong bối cảnh robot, điều này có nghĩa là robot có thể bắt đầu ở trạng thái “Đang di chuyển” khi thực tế phải ở trạng thái “Đang chờ”. Điều này có thể dẫn đến kích hoạt ngay lập tức của cơ cấu chấp hành, gây ra nguy cơ an toàn.
- Khởi tạo không xác định: Mã code giả định rằng một trạng thái tồn tại mà không kiểm tra xem nó có phải là điểm vào đúng hay không.
- Vấn đề khi khởi động lại nguồn:Khi khởi động lại, robot có thể giữ lại dữ liệu từ phiên trước nhưng lại không reset lại logic điều khiển.
- Logic khởi tạo:Không có trạng thái khởi tạo riêng biệt, các trình tự khởi tạo thường bị rải rác qua nhiều hàm chuyển tiếp.
Mỗi máy trạng thái mạnh mẽ phải xác định rõ ràng điều kiện đầu vào. Điều này đảm bảo cảm biến được hiệu chỉnh, cơ cấu chấp hành được phanh, và bộ điều khiển logic sẵn sàng trước khi robot chấp nhận lệnh từ bên ngoài.
2. ⏸️ Chết chặn và các chuyển tiếp bị thiếu
Chết chặn xảy ra khi hệ thống đi vào một trạng thái mà từ đó không thể thực hiện bất kỳ chuyển tiếp nào. Trong sơ đồ, điều này trông giống như một hộp không có mũi tên ra. Trong mã, điều này thể hiện dưới dạng treo hoặc đóng băng.
Robot hoạt động trong môi trường động. Nếu một cảm biến không gửi dữ liệu, robot không được dừng lại mãi mãi. Một máy trạng thái chờ một điều kiện không bao giờ xảy ra sẽ tạo ra chết chặn. Điều này đặc biệt nguy hiểm trong các nhiệm vụ định vị, nơi robot có thể chờ đường đi được thông thoáng nhưng lại bị vật cản chặn lại.
Nguyên nhân phổ biến gây chết chặn bao gồm:
- Trạng thái không thể tiếp cận:Các trạng thái được định nghĩa trong sơ đồ nhưng chưa bao giờ được kết nối với luồng chính.
- Thiếu chuyển tiếp mặc định:Không xác định chuyển tiếp “bắt tất cả” cho các đầu vào không mong đợi.
- Mâu thuẫn logic:Các điều kiện bảo vệ mâu thuẫn nhau, khiến không còn con đường nào để tiến triển.
Để ngăn chặn điều này, mỗi trạng thái phải có đường thoát được xác định rõ ràng. Nếu điều kiện mong đợi không được đáp ứng trong một khoảng thời gian nhất định, hệ thống nên chuyển sang trạng thái hết thời gian hoặc trạng thái lỗi thay vì chờ mãi mãi.
3. 🔄 Quản lý đồng thời sai lệch
Robot thường thực hiện nhiều nhiệm vụ đồng thời. Một máy bay không người lái có thể cần ổn định bay trong khi quét tìm vật cản. Một máy trạng thái tuần tự đơn giản không thể xử lý điều này. Các kỹ sư đôi khi cố gắng mô phỏng tính đồng thời bằng cách lồng ghép các trạng thái, nhưng điều này thường dẫn đến logic phức tạp, khó bảo trì.
Tính đồng thời thực sự đòi hỏi các vùng song song bên trong máy trạng thái. Nếu sơ đồ thể hiện một luồng duy nhất cho các nhiệm vụ song song, mã kết quả có khả năng thực thi chúng lần lượt. Điều này tạo ra độ trễ có thể không chấp nhận được đối với các vòng điều khiển tốc độ cao.
- Thực thi xen kẽ:Xử lý tuần tự các nhiệm vụ song song gây ra độ trễ trong các thao tác quan trọng.
- Xung đột tài nguyên: Nhiều trạng thái đang cố gắng truy cập cùng một tài nguyên phần cứng đồng thời mà không có sự đồng bộ.
- Sự bùng nổ trạng thái: Việc cố gắng mô hình hóa mọi tổ hợp của các tác vụ song song dẫn đến sự bùng nổ tổ hợp các trạng thái.
Mô hình hóa đúng yêu cầu xác định các hoạt động độc lập và gán chúng vào các vùng song song riêng biệt. Điều này cho phép thời gian chạy lập lịch chúng một cách hiệu quả mà không làm chặn lẫn nhau.
4. 🛑 Điều kiện bảo vệ quá phức tạp
Các điều kiện bảo vệ là các biểu thức logic xác định xem một chuyển tiếp có thể xảy ra hay không. Mặc dù cần thiết cho kiểm soát, nhưng nếu các điều kiện này quá phức tạp sẽ làm mờ dòng logic. Một điều kiện bảo vệ kéo dài đến năm dòng mã rất khó gỡ lỗi và xác minh.
Trong robot, các cảm biến cung cấp dữ liệu nhiễu. Một điều kiện bảo vệ phụ thuộc vào nhiều phép đọc cảm biến đồng thời dễ bị lỗi cạnh tranh. Nếu một cảm biến cập nhật sớm hơn một chút so với cảm biến khác, logic có thể được đánh giá khác với mong muốn.
Các điều kiện bảo vệ phức tạp dẫn đến:
- Các phụ thuộc ẩn:Thứ tự đánh giá là quan trọng, nhưng không được thể hiện rõ ràng trong sơ đồ.
- Khó khăn trong gỡ lỗi:Khi một chuyển tiếp không kích hoạt được, rất khó xác định phần nào của điều kiện đã thất bại.
- Dư thừa mã nguồn:Logic phức tạp thường bị lặp lại trên nhiều chuyển tiếp.
Tốt hơn hết là đơn giản hóa các điều kiện bảo vệ. Chuyển logic phức tạp vào các hành động nhập hoặc xuất của một trạng thái. Điều này giúp các chuyển tiếp luôn sạch sẽ và sơ đồ trạng thái dễ đọc. Ví dụ, thay vì kiểm tra mức pin trên mỗi chuyển tiếp, hãy kiểm tra một lần khi vào trạng thái “Thấp điện năng”.
5. ⏱️ Bỏ qua thời gian chờ và bộ giám sát
Các hệ thống thời gian thực đòi hỏi nhận thức về thời gian. Một máy trạng thái phụ thuộc hoàn toàn vào các sự kiện kích hoạt là dễ bị tổn thương. Điều gì xảy ra nếu một sự kiện không bao giờ đến? Robot sẽ chờ vô thời hạn.
Thiết lập thời gian chờ là điều cần thiết để đảm bảo độ bền. Mỗi trạng thái nên có thời lượng tối đa mà nó có thể duy trì hoạt động. Nếu điều kiện chuyển tiếp không được đáp ứng, một bộ đếm thời gian sẽ kích hoạt trạng thái dự phòng.
- Bộ giám sát phần cứng:Các cơ chế bên ngoài sẽ khởi động lại hệ thống nếu phần mềm bị treo.
- Bộ đếm thời gian nội bộ:Logic bên trong máy trạng thái để áp đặt giới hạn thời gian cho các trạng thái cụ thể.
- Tín hiệu nhịp tim:Đảm bảo vòng điều khiển đang hoạt động và phản hồi.
Không có thời gian chờ, một lỗi tạm thời từ cảm biến có thể khiến robot bị kẹt tại chỗ. Cơ chế thời gian chờ đảm bảo hệ thống phục hồi một cách trơn tru và cố gắng khởi động lại hoặc chuyển sang chế độ an toàn.
6. 🚨 Thiếu các trạng thái phục hồi lỗi
Nhiều sơ đồ chỉ tập trung vào “con đường thuận lợi”. Chúng cho thấy robot hoạt động như thế nào khi mọi thứ diễn ra suôn sẻ. Chúng hiếm khi thể hiện cách robot hành xử khi có sự cố xảy ra.
Robot hoạt động trong môi trường không cấu trúc. Các khớp có thể bị kẹt, động cơ có thể quá nhiệt, hoặc kết nối truyền thông có thể bị ngắt. Không có các trạng thái lỗi rõ ràng, hệ thống có thể bị sập hoặc hành xử một cách không lường trước.
Một máy trạng thái vững chắc bao gồm:
- Các trạng thái an toàn: Một trạng thái được chỉ định nơi robot dừng mọi chuyển động và chờ can thiệp.
- Logic phục hồi: Các bước được thực hiện để cố gắng khôi phục hệ thống tự động.
- Đầu ra chẩn đoán: Ghi lại các mã lỗi cụ thể để giúp kỹ sư xác định nguyên nhân gốc rễ.
Bỏ qua các trạng thái lỗi chuyển gánh nặng xử lý sự cố sang lớp sinh mã, thường thiếu bối cảnh để xử lý các trường hợp đặc biệt một cách hiệu quả.
7. 📦 Cơ chế truyền dữ liệu kém hiệu quả
Dữ liệu chảy qua máy trạng thái thông qua các chuyển tiếp. Khi robot di chuyển từ “Tiến lại gần” sang “Bắt giữ”, nó cần truyền tọa độ mục tiêu. Nếu sơ đồ máy trạng thái không rõ ràng định nghĩa cách dữ liệu được truyền, mã nguồn sẽ gặp khó khăn.
Các vấn đề phổ biến bao gồm:
- Biến toàn cục:Dựa vào bộ nhớ chung mà không đồng bộ hóa dẫn đến các điều kiện cạnh tranh.
- Thiếu tham số:Các chuyển tiếp được định nghĩa mà không có bối cảnh dữ liệu cần thiết.
- Độ trễ dữ liệu:Truyền dữ liệu đã lỗi thời vào thời điểm trạng thái được vào.
Các tham số cần được xác định rõ ràng trên các chuyển tiếp. Điều này đảm bảo rằng trạng thái nhận được có chính xác thông tin cần thiết ngay tại thời điểm vào. Nó cũng khiến sơ đồ tự động ghi chú về các phụ thuộc dữ liệu.
8. 🏷️ Quy ước đặt tên trạng thái mơ hồ
Tên trong máy trạng thái là giao diện chính để gỡ lỗi. Những tên mơ hồ như “Trạng thái 1” hay “Quy trình” không cung cấp bất kỳ thông tin nào về trạng thái hệ thống. Trong một robot phức tạp, kỹ sư cần xem nhật ký và ngay lập tức biết hệ thống đang làm gì.
Các quy ước đặt tên tốt nên có:
- Mô tả rõ ràng: “Wheel_Motor_On” tốt hơn “Run”.
- Nhất quán:Sử dụng cùng một thì động từ và cấu trúc danh từ trên tất cả các trạng thái.
- Độc nhất:Tránh dùng tên trông giống nhau, ví dụ như “Error” và “Error_Handler”.
Đặt tên nhất quán giúp giảm tải nhận thức khi xem xét mã nguồn hoặc nhật ký. Nó cũng giúp các công cụ tự động tạo tài liệu và các trường hợp kiểm thử tốt hơn dựa trên mô hình.
Bảng: Những sai lầm phổ biến so với các thực hành tốt nhất
| Vùng | Sai lầm | Thực hành tốt nhất |
|---|---|---|
| Điểm vào | Không có trạng thái khởi tạo nào được xác định | Điểm vào rõ ràng với logic khởi tạo |
| Kiểm soát luồng | Chết máy do thiếu chuyển tiếp | Đảm bảo mọi trạng thái đều có đường thoát |
| Đồng thời | Xử lý tuần tự các tác vụ song song | Sử dụng các vùng song song cho các hoạt động độc lập |
| Logic | Điều kiện bảo vệ phức tạp | Chuyển logic sang các hành động trạng thái, giữ điều kiện bảo vệ đơn giản |
| Thời gian | Không có thời gian chờ trong các trạng thái chờ | Thiết lập bộ đếm giám sát và bộ đếm thời gian nội bộ |
| Độ tin cậy | Thiếu các trạng thái lỗi | Xác định rõ ràng các trạng thái an toàn và phục hồi |
| Dữ liệu | Chia sẻ dữ liệu toàn cục ngầm định | Truyền dữ liệu rõ ràng thông qua tham số chuyển tiếp |
| Tài liệu | Tên trạng thái mơ hồ | Sử dụng quy ước đặt tên mô tả và nhất quán |
Xem xét khi triển khai
Một khi sơ đồ được hoàn thiện, việc chuyển đổi sang mã nguồn cần được thực hiện cẩn trọng. Mô hình phải dẫn dắt việc triển khai, chứ không phải ngược lại. Việc sửa đổi mã nguồn để vượt qua ràng buộc của máy trạng thái thường dẫn đến nợ kỹ thuật.
Các công cụ sinh mã có thể giúp lấp đầy khoảng cách này. Chúng đảm bảo rằng thời gian chạy khớp chính xác với thiết kế. Tuy nhiên, việc chỉ dựa vào sinh mã mà không hiểu logic nền tảng là rủi ro. Các kỹ sư phải có khả năng đọc mã sinh ra và xác minh rằng nó phù hợp với mục đích của sơ đồ.
Kiểm thử máy trạng thái
Kiểm thử đơn vị là rất quan trọng. Mỗi trạng thái và chuyển tiếp cần được xác minh độc lập. Kiểm thử tích hợp đảm bảo rằng các thay đổi trạng thái không gây ra tác động phụ ở các phần khác của hệ thống.
- Kiểm thử chuyển tiếp: Xác minh rằng các đầu vào cụ thể sẽ kích hoạt các thay đổi trạng thái đúng.
- Xác minh trạng thái: Đảm bảo hệ thống duy trì ở trạng thái cho đến khi điều kiện thoát hợp lệ xảy ra.
- Kiểm thử tải trọng: Chạy hệ thống dưới tải để kiểm tra các vấn đề về thời gian hoặc điều kiện cạnh tranh.
Các môi trường mô phỏng cho phép kiểm thử an toàn các chế độ lỗi. Các kỹ sư có thể tạo ra các lỗi cảm biến hoặc độ trễ truyền thông để xem máy trạng thái phản ứng như thế nào mà không làm nguy hiểm thiết bị.
Chi phí của việc mô hình hóa kém
Sửa máy trạng thái trong sơ đồ là rẻ. Sửa nó trong mã đã triển khai là tốn kém. Trong robot, một lỗi logic có thể dẫn đến hư hại vật lý cho robot hoặc môi trường. Nó cũng có thể gây chấn thương cho người vận hành.
Đầu tư thời gian vào quy trình thiết kế nghiêm ngặt sẽ mang lại sự ổn định. Một máy trạng thái được tài liệu hóa tốt sẽ là nguồn thông tin duy nhất cho toàn bộ đội ngũ phát triển. Nó giúp cải thiện sự hợp tác giữa các kỹ sư phần cứng và phần mềm.
Tóm tắt những điểm chính cần lưu ý
Xây dựng mã nguồn robot đáng tin cậy bắt đầu bằng một mô hình vững chắc. Tránh các sai lầm phổ biến như thiếu trạng thái khởi đầu, kẹt chờ và xử lý đồng thời kém là điều cần thiết. Xử lý lỗi mạnh mẽ và cơ chế truyền dữ liệu rõ ràng đảm bảo hệ thống có thể phục hồi khỏi các điều kiện bất ngờ.
Bằng cách tuân thủ những nguyên tắc này, các nhà phát triển có thể tạo ra các máy trạng thái không chỉ hoạt động được mà còn bền bỉ. Sự khác biệt giữa một mẫu thử nghiệm và một sản phẩm thường nằm ở chất lượng logic điều khiển. Chú ý đến chi tiết trong giai đoạn thiết kế sẽ ngăn ngừa những rắc rối trong giai đoạn triển khai.
Giữ logic đơn giản. Làm rõ các chuyển tiếp. Xử lý lỗi chủ động. Những thực hành này tạo nên nền tảng của các hệ thống robot đáng tin cậy.
