











Проектирование логики управления для автономных систем требует точности. Когда инженеры переходят от концепции к реализации, диаграмма конечного автомата на языке унифицированного моделирования (UML) часто выступает в качестве чертежа. Однако разрыв между диаграммой и фактическим кодом может привести к катастрофическим сбоям в среде робототехники. Робот, который колеблется, когда должен двигаться, или тот, который попадает в бесконечный цикл при выполнении простой задачи, часто страдает от фундаментальных ошибок в архитектуре конечного автомата.
Создание надежного встроенного программного обеспечения требует больше, чем просто рисование прямоугольников и стрелок. Это требует глубокого понимания потока выполнения, временных интервалов и управления ресурсами. В этом руководстве рассматриваются конкретные ловушки, которые подрывают работоспособность робототехнических конечных автоматов. Выявив эти структурные слабости, разработчики могут обеспечить стабильную работу своих систем, необходимую для реального применения.
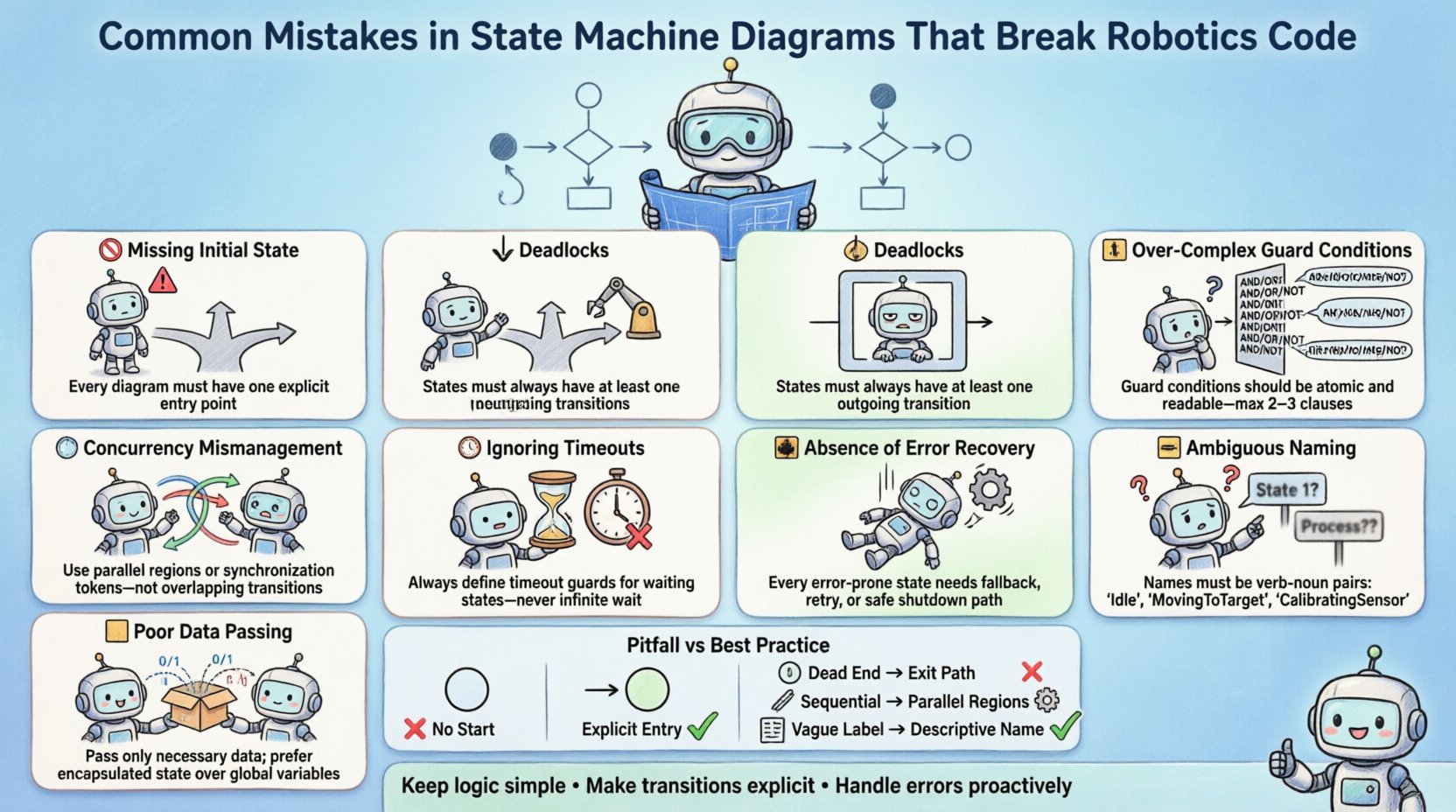
1. 🚫 Отсутствующее начальное состояние
Основой любого конечного автомата (КАв) является начальное состояние. Это точка входа, с которой система начинает свою работу при включении или сбросе. Распространённой ошибкой при составлении диаграмм является пропуск этой начальной точки или её неоднозначное определение.
Когда код генерируется из диаграммы, в которой отсутствует определённая точка входа, среда выполнения часто переходит на произвольное состояние. В контексте робототехники это означает, что робот может начать работу в состоянии «Движение», хотя должен находиться в состоянии «Ожидание». Это может привести к немедленному включению приводов, вызывая опасные ситуации.
- Неопределённый старт: Код предполагает существование состояния без проверки, является ли оно правильной точкой входа.
- Проблемы при перезагрузке: При перезагрузке робот может сохранять данные из предыдущей сессии, но не сбрасывать логику управления.
- Логика инициализации: Без выделенного начального состояния последовательности инициализации часто разбросаны по нескольким функциям переходов.
У каждого надёжного конечного автомата должно быть явно определено условие входа. Это гарантирует, что датчики откалиброваны, приводы заблокированы, а контроллер логики готов к приёму внешних команд перед началом работы робота.
2. ⏸️ Зависания и отсутствующие переходы
Зависание возникает, когда система попадает в состояние, из которого невозможны переходы. На диаграмме это выглядит как прямоугольник без исходящих стрелок. В коде это проявляется как зависание или заморозка.
Роботы работают в динамичной среде. Если датчик не передаёт данные, робот не должен останавливаться бесконечно. Конечный автомат, ожидающий условия, которое никогда не наступит, вызывает зависание. Это особенно опасно при навигации, когда робот может ждать освобождения пути, заблокированного препятствием.
Распространённые причины зависаний включают:
- Недоступные состояния:Состояния, определённые на диаграмме, но никогда не подключённые к основному потоку.
- Отсутствующие переходы по умолчанию:Отказ определить переход «все включительно» для неожиданных входных данных.
- Логические противоречия:Условия-ограничения, которые взаимно исключают друг друга, оставляя без пути вперёд.
Чтобы избежать этого, каждое состояние должно иметь определённый путь выхода. Если ожидаемое условие не выполняется в течение определённого времени, система должна перейти в состояние таймаута или ошибки, а не ждать бесконечно.
3. 🔄 Неправильное управление параллелизмом
Роботы часто выполняют несколько задач одновременно. Дрон может нуждаться в стабилизации полёта, одновременно сканируя препятствия. Простой последовательный конечный автомат не может справиться с этим. Инженеры иногда пытаются моделировать параллелизм, вкладывая состояния, но это часто приводит к сложной, трудно поддерживаемой логике.
Истинный параллелизм требует параллельных областей внутри конечного автомата. Если диаграмма показывает единственный поток для параллельных задач, то получившийся код, скорее всего, будет выполнять их последовательно. Это вводит задержку, которая может быть неприемлемой для высокоскоростных циклов управления.
- Перемежающееся выполнение:Последовательная обработка параллельных задач вызывает задержки в критических операциях.
- Конкуренция за ресурсы: Несколько состояний одновременно пытаются получить доступ к одному и тому же аппаратному ресурсу без синхронизации.
- Эксплозия состояний: Попытка смоделировать каждую комбинацию параллельных задач приводит к комбинаторному взрыву состояний.
Правильное моделирование включает выявление независимых действий и их назначение отдельным параллельным областям. Это позволяет среде выполнения эффективно планировать их выполнение без взаимной блокировки.
4. 🛑 Слишком сложные условия-ограничения
Условия-ограничения — это логические выражения, определяющие, может ли произойти переход. Хотя они необходимы для контроля, чрезмерная сложность этих условий затрудняет понимание логики. Условие, занимающее пять строк кода, сложно отлаживать и проверять.
В робототехнике датчики предоставляют шумные данные. Условие-ограничение, зависящее от одновременного чтения нескольких датчиков, подвержено гонкам. Если один датчик обновится немного раньше другого, логика может оценить условие иначе, чем задумано.
Сложные условия-ограничения приводят к:
- Скрытые зависимости: Порядок оценки имеет значение, но не указан явно на диаграмме.
- Сложность отладки: Когда переход не срабатывает, трудно определить, какая часть условия не сработала.
- Избыточный объем кода: Сложная логика часто дублируется в нескольких переходах.
Лучше упростить условия-ограничения. Перенесите сложную логику в действия входа или выхода состояния. Это сохранит переходы чистыми и диаграмму состояний читаемой. Например, вместо проверки уровня заряда батареи при каждом переходе, проверьте его один раз при входе в состояние «Низкий уровень энергии».
5. ⏱️ Пренебрежение таймаутами и сторожевыми таймерами
Системы реального времени требуют учета времени. Машина состояний, зависящая исключительно от событий, хрупка. Что произойдет, если событие никогда не придет? Робот будет ждать бесконечно.
Реализация таймаутов критически важна для устойчивости. Каждое состояние должно иметь максимальную продолжительность активности. Если условие перехода не выполнено, таймер активирует резервное состояние.
- Аппаратные сторожевые таймеры: Внешние механизмы, перезагружающие систему, если программное обеспечение зависло.
- Внутренние таймеры: Логика внутри машины состояний для установки временных ограничений на конкретные состояния.
- Сигналы-пульсации: Обеспечение активности и реакции цикла управления.
Без таймаутов временный сбой датчика может застопорить робота. Механизм таймаута обеспечивает плавное восстановление системы и попытку перезагрузки или перехода в безопасный режим.
6. 🚨 Отсутствие состояний восстановления после ошибок
Многие диаграммы фокусируются только на «счастливом пути». Они показывают, как работает робот, когда все идет хорошо. Редко они показывают, как ведет себя робот, когда что-то выходит из строя.
Роботы работают в неструктурированных средах. Соединения могут заедать, двигатели могут перегреваться, или связь может прерываться. Без явных состояний ошибок система может аварийно завершиться или вести себя непредсказуемо.
Надежная машина состояний включает:
- Безопасные состояния: Указанный состояние, в котором робот останавливает все движения и ожидает вмешательства.
- Логика восстановления: Шаги, предпринимаемые для попытки автоматической перезагрузки системы.
- Диагностические выходы: Ведение журнала конкретных кодов ошибок для помощи инженерам в выявлении корневой причины.
Игнорирование состояний ошибок перекладывает ответственность за обработку сбоев на слой генерации кода, который часто не обладает контекстом для эффективной обработки крайних случаев.
7. 📦 Плохие механизмы передачи данных
Данные проходят через машину состояний с помощью переходов. Когда робот переходит от «Приближения» к «Хватанию», ему необходимо передать координаты цели. Если диаграмма машины состояний не определяет четко, как передаются данные, код будет испытывать трудности.
Распространенные проблемы включают:
- Глобальные переменные:Зависимость от общей памяти без синхронизации приводит к гонкам данных.
- Отсутствующие параметры:Переходы, определенные без необходимого контекста данных.
- Задержка данных: Передача данных, которые устарели к моменту входа в состояние.
Параметры должны быть явно определены на переходах. Это гарантирует, что принимающее состояние получит точную информацию, необходимую в момент входа. Это также делает диаграмму самодокументирующейся в отношении зависимостей данных.
8. 🏷️ Неоднозначные соглашения об именовании состояний
Имена в машине состояний являются основным интерфейсом для отладки. Неопределенные имена, такие как «Состояние 1» или «Процесс», не дают никакого представления о состоянии системы. В сложном роботе инженеру необходимо посмотреть на журнал и сразу понять, что делает система.
Хорошие соглашения об именовании должны быть:
- Описательные: «Wheel_Motor_On» лучше, чем «Run».
- Согласованные: Используйте одинаковую форму глагола и структуру существительного во всех состояниях.
- Уникальные: Избегайте похожих имён, таких как «Error» и «Error_Handler».
Согласованное именование снижает когнитивную нагрузку при просмотре кода или журналов. Это также помогает автоматизированным инструментам генерировать лучшую документацию и тестовые случаи на основе модели.
Таблица: Распространенные ошибки против лучших практик
| Область | Ошибки | Лучшая практика |
|---|---|---|
| Точка входа | Начальное состояние не определено | Явная точка входа с логикой инициализации |
| Управление потоком | Взаимоблокировки из-за отсутствующих переходов | Обеспечьте, чтобы каждое состояние имело путь выхода |
| Параллелизм | Последовательная обработка параллельных задач | Используйте параллельные области для независимых действий |
| Логика | Сложные условия-ограничения | Перенесите логику в действия состояний, оставьте условия-ограничения простыми |
| Время | Нет таймаутов для состояний ожидания | Реализуйте сторожевые таймеры и внутренние таймеры |
| Надежность | Отсутствуют состояния ошибок | Явно определите безопасные и состояния восстановления |
| Данные | Неявное общее использование глобальных данных | Передавайте данные явно через параметры перехода |
| Документация | Неоднозначные имена состояний | Используйте описательные, последовательные соглашения об именовании |
Рассмотрение реализации
Как только диаграмма будет завершена, перевод в код требует внимания. Модель должна определять реализацию, а не наоборот. Изменение кода для обхода ограничения машины состояний часто приводит к техническому долгу.
Генераторы кода могут помочь преодолеть этот разрыв. Они обеспечивают точное соответствие времени выполнения и проектированию. Однако полагаться исключительно на генерацию без понимания лежащей в основе логики опасно. Инженеры должны уметь читать сгенерированный код и проверять, соответствует ли он намерениям диаграммы.
Тестирование машины состояний
Тестирование отдельных модулей имеет решающее значение. Каждое состояние и переход должны проверяться независимо. Интеграционное тестирование гарантирует, что изменения состояний не вызывают побочных эффектов в других частях системы.
- Тестирование переходов: Убедитесь, что конкретные входные данные вызывают правильные изменения состояния.
- Проверка состояния: Убедитесь, что система остается в состоянии до наступления допустимого условия выхода.
- Стресс-тестирование: Запустите систему под нагрузкой, чтобы проверить наличие проблем со временем или гонок состояний.
Среды моделирования позволяют безопасно тестировать режимы отказов. Инженеры могут вводить сбои датчиков или задержки в коммуникации, чтобы увидеть, как реагирует автомат состояний, не рискуя оборудованием.
Стоимость плохого моделирования
Исправление автомата состояний на схеме дешево. Исправление его в развернутом коде дорого. В робототехнике ошибка логики может привести к физическому повреждению робота или окружающей среды. Это также может повлечь за собой травмы операторов.
Вложение времени в строгий процесс проектирования окупается стабильностью. Хорошо документированный автомат состояний служит единственным источником истины для всей команды разработчиков. Это позволяет лучше взаимодействовать между инженерами аппаратного и программного обеспечения.
Краткое резюме ключевых выводов
Создание надежного робототехнического кода начинается с надежной модели. Избегание распространенных ошибок, таких как отсутствие начальных состояний, взаимоблокировки и плохое управление параллелизмом, является обязательным. Надежная обработка ошибок и четкие механизмы передачи данных обеспечивают возможность восстановления системы после неожиданных условий.
Соблюдая эти принципы, разработчики могут создавать автоматы состояний, которые не просто функциональны, но и устойчивы. Разница между прототипом и продуктом часто заключается в качестве управляющей логики. Внимание к деталям на этапе проектирования предотвращает головные боли на этапе развертывания.
Держите логику простой. Делайте переходы явными. Принимайте меры по предотвращению ошибок заранее. Эти практики составляют основу надежных робототехнических систем.
