











Projektowanie logiki sterowania dla systemów autonomicznych wymaga precyzji. Gdy inżynierowie przechodzą od koncepcji do wdrożenia, diagram maszyny stanów w języku UML często pełni rolę projektu. Jednak rozłączenie między diagramem a rzeczywistym kodem może prowadzić do katastrofalnych awarii w środowiskach robotycznych. Robot, który wahanie się, gdy powinien się poruszać, albo ten, który wchodzi w nieskończoną pętlę podczas prostego zadania, często wynika z podstawowych błędów w architekturze maszyny stanów.
Tworzenie niezawodnego oprogramowania wbudowanego wymaga więcej niż rysowania pudełek i strzałek. Wymaga głębokiego zrozumienia przepływu wykonywania, synchronizacji czasu i zarządzania zasobami. Ten przewodnik analizuje konkretne pułapki, które naruszają maszyny stanów robotów. Identyfikując te słabości strukturalne, programiści mogą zapewnić, że ich systemy działają z wytrzymałością niezbędną do wdrożenia w rzeczywistych warunkach.
1. 🚫 Brakujące stan początkowy
Podstawą każdej maszyny stanów skończonych (FSM) jest stan początkowy. Jest to punkt wejścia, w którym system rozpoczyna działanie po włączeniu zasilania lub zresetowaniu. Powszechnym błędem podczas tworzenia diagramu jest pominięcie tego punktu początkowego lub pozostawienie go niejasnym.
Gdy kod generowany jest z diagramu, który nie ma zdefiniowanego stanu wejściowego, środowisko uruchomieniowe często domyślnie przechodzi do dowolnego stanu. W kontekście robotycznym oznacza to, że robot może rozpocząć działanie w stanie „Poruszanie się”, gdy powinien być w stanie „Nieczynność”. Może to spowodować natychmiastowe uruchomienie aktuatorów, co prowadzi do zagrożeń bezpieczeństwa.
- Nieokreślony początek: Kod zakłada, że stan istnieje, nie sprawdzając, czy jest poprawnym punktem wejścia.
- Problemy z cyklem zasilania: Po ponownym uruchomieniu robot może zachować dane z poprzedniej sesji, ale nie zresetować logiki sterowania.
- Logika inicjalizacji: Bez dedykowanego stanu początkowego sekwencje inicjalizacji często są rozrzucone na wiele funkcji przejścia.
Każda niezawodna maszyna stanów musi jasno zdefiniować warunek wejścia. Zapewnia to, że czujniki są kalibrowane, aktuatory są hamowane, a kontroler logiczny jest gotowy przed tym, jak robot zaakceptuje polecenia zewnętrzne.
2. ⏸️ Zawieszenia i brakujące przejścia
Zawieszenie występuje, gdy system wchodzi w stan, z którego nie są możliwe żadne przejścia. W diagramie wygląda to jak pudełko bez strzałek wychodzących. W kodzie manifestuje się jako zawieszenie lub zamarznięcie.
Roboty działają w dynamicznych środowiskach. Jeśli czujnik nie zgłasza danych, robot nie może zatrzymać się na zawsze. Maszyna stanów, która czeka na warunek, który nigdy nie zostanie spełniony, powoduje zawieszenie. Jest to szczególnie niebezpieczne w zadaniach nawigacji, gdzie robot może czekać na oczyszczenie trasy, która jest zablokowana przez przeszkodę.
Powszechne przyczyny zawieszeń to:
- Nieosiągalne stany:Stany zdefiniowane w diagramie, ale nigdy nie połączone z głównym przepływem.
- Brakujące przejścia domyślne:Nie definiowanie przejścia „ogólne” dla nieoczekiwanych danych wejściowych.
- Zdania logiczne:Warunki strażnicze, które wzajemnie się wykluczają, pozostawiając bez możliwości dalszego postępu.
Aby temu zapobiec, każdy stan powinien mieć zdefiniowany sposób wyjścia. Jeśli oczekiwany warunek nie zostanie spełniony w określonym czasie, system powinien przejść do stanu przekroczenia czasu lub stanu błędu, zamiast czekać na zawsze.
3. 🔄 Nieprawidłowe zarządzanie współbieżnością
Roboty często wykonują wiele zadań jednocześnie. Dron może potrzebować stabilizacji lotu podczas skanowania przeszkód. Prosta maszyna stanów sekwencyjnych nie potrafi tego obsłużyć. Inżynierowie czasem próbują modelować współbieżność przez zagnieżdżanie stanów, ale często prowadzi to do skomplikowanej, trudnej do utrzymania logiki.
Prawdziwa współbieżność wymaga regionów równoległych w maszynie stanów. Jeśli diagram pokazuje pojedynczy przepływ dla zadań równoległych, to powstały kod prawdopodobnie będzie wykonywał je jedno po drugim. Powoduje to opóźnienia, które mogą być nieakceptowalne dla szybkich pętli sterowania.
- Wykonywanie naprzemienne:Sekwencyjne przetwarzanie zadań równoległych powoduje opóźnienia w krytycznych operacjach.
- Zawieranie zasobów: Wiele stanów próbujących jednocześnie uzyskać dostęp do tego samego zasobu sprzętowego bez synchronizacji.
- Eksplozja stanów: Próba modelowania każdej kombinacji zadań równoległych prowadzi do kombinatorycznej eksplozji stanów.
Poprawne modelowanie polega na identyfikacji niezależnych działań i przypisaniu ich do różnych obszarów równoległych. Pozwala to środowisku uruchomieniowemu efektywnie je planować bez wzajemnego blokowania.
4. 🛑 Zbyt skomplikowane warunki strażnika
Warunki strażnika to wyrażenia logiczne określające, czy przejście może nastąpić. Choć są one niezbędne do kontroli, nadmierne ich skomplikowanie utrudnia zrozumienie przebiegu logiki. Warunek rozciągający się na pięć linii kodu jest trudny do debugowania i weryfikacji.
W robotyce czujniki dostarczają zaszumionych danych. Warunek strażnika oparty na jednoczesnych odczytach wielu czujników jest podatny na warunki wyścigu. Jeśli jeden czujnik zostanie zaktualizowany nieco wcześniej niż inny, logika może zostać oceniona inaczej niż zamierzono.
Złożone warunki strażnika prowadzą do:
- Ukryte zależności:Kolejność oceny ma znaczenie, ale nie jest jawnie zaznaczona na diagramie.
- Trudności z debugowaniem: Gdy przejście nie zostaje wyzwolone, trudno stwierdzić, która część warunku się nie powiodła.
- Zbyt dużo kodu:Złożona logika często powtarza się w wielu przejściach.
Lepiej uprościć warunki strażnika. Przenieś złożoną logikę do akcji wejścia lub wyjścia stanu. Pozwala to utrzymać przejścia czyste oraz diagram stanów czytelny. Na przykład zamiast sprawdzać poziom baterii przy każdym przejściu, sprawdź go tylko raz przy wejściu do stanu „Niski poziom energii”.
5. ⏱️ Ignorowanie limitów czasu i zegarów nadzorujących
Systemy czasu rzeczywistego wymagają świadomości czasu. Maszyna stanów oparta wyłącznie na wyzwalaczy zdarzeń jest krucha. Co się stanie, jeśli zdarzenie nigdy nie nastąpi? Robot czeka bez końca.
Wprowadzanie limitów czasu jest kluczowe dla odporności systemu. Każdy stan powinien mieć maksymalny czas trwania. Jeśli warunek przejścia nie zostanie spełniony, zegar wyzwala stan alternatywny.
- Zegary nadzorujące sprzętowe: Zewnętrzne mechanizmy resetujące system, jeśli oprogramowanie zawiesi się.
- Wewnętrzne zegary: Logika wewnątrz maszyny stanów, która nakłada limity czasu na określone stany.
- Sygnały taktujące: Zapewnienie, że pętla sterowania jest aktywna i reaguje.
Bez limitów czasu tymczasowy błąd czujnika może zablokować robota. Mechanizm limitu czasu zapewnia, że system odzyskuje się sprawnie i próbuje zresetować się lub przejść do trybu bezpiecznego.
6. 🚨 Brak stanów odzyskiwania po błędach
Wiele diagramów skupia się wyłącznie na „drodze szczęścia”. Pokazują, jak robot działa, gdy wszystko idzie dobrze. Rzadko pokazują, jak robot zachowuje się, gdy coś się popsuje.
Roboty działają w nieuporządkowanych środowiskach. Węzły mogą się zacinać, silniki mogą przegrzewać się, a komunikacja może ulec zerwaniu. Bez jawnie zdefiniowanych stanów błędów system może się zawiesić lub zachowywać nieprzewidywalnie.
Robustna maszyna stanów zawiera:
- Stany bezpieczne: Stan wyznaczony, w którym robot zatrzymuje wszystkie ruchy i czeka na interwencję.
- Logika odzyskiwania: Krok, które są podejmowane w celu automatycznego ponownego uruchomienia systemu.
- Wyjścia diagnostyczne: Rejestrowanie określonych kodów błędów w celu pomocy inżynierom w identyfikacji przyczyny głównej.
Ignorowanie stanów błędów przesuwa obciążenie obsługi awarii na warstwę generowania kodu, która często nie ma kontekstu do skutecznego radzenia sobie z przypadkami granicznymi.
7. 📦 Złe mechanizmy przekazywania danych
Dane przepływają przez maszynę stanów poprzez przejścia. Gdy robot przechodzi z „Podejścia” do „Chwytania”, musi przekazać współrzędne celu. Jeśli diagram maszyny stanów nie określa jasno, jak dane są przekazywane, kod będzie miał trudności.
Typowe problemy obejmują:
- Zmienne globalne:Opieranie się na pamięci współdzielonej bez synchronizacji prowadzi do warunków wyścigu.
- Brakujące parametry:Przejścia zdefiniowane bez koniecznego kontekstu danych.
- Zwłoka danych:Przekazywanie danych, które są przestarzałe w momencie wejścia do stanu.
Parametry powinny być jawnie zdefiniowane w przejściach. Zapewnia to, że stan odbierający ma dokładnie tę informację, której potrzebuje w momencie wejścia. Zwiększa również samodokumentowanie diagramu pod kątem zależności danych.
8. 🏷️ Niejasne konwencje nazewnictwa stanów
Nazwy w maszynie stanów są głównym interfejsem do debugowania. Nieprecyzyjne nazwy takie jak „Stan 1” lub „Proces” nie dają żadnej wskazówki dotyczącej stanu systemu. W złożonym robotzie inżynier musi spojrzeć na log i natychmiast wiedzieć, co system robi.
Dobre konwencje nazewnictwa powinny być:
- Opisowe: „Wheel_Motor_On” jest lepsze niż „Run”.
- Spójne: Używaj tej samej czasownika i struktury rzeczownika we wszystkich stanach.
- Unikalne: Unikaj nazw, które wyglądają podobnie, takich jak „Error” i „Error_Handler”.
Spójne nazewnictwo zmniejsza obciążenie poznawcze podczas przeglądania kodu lub logów. Pomaga również narzędziom automatycznym generować lepszą dokumentację i przypadki testowe oparte na modelu.
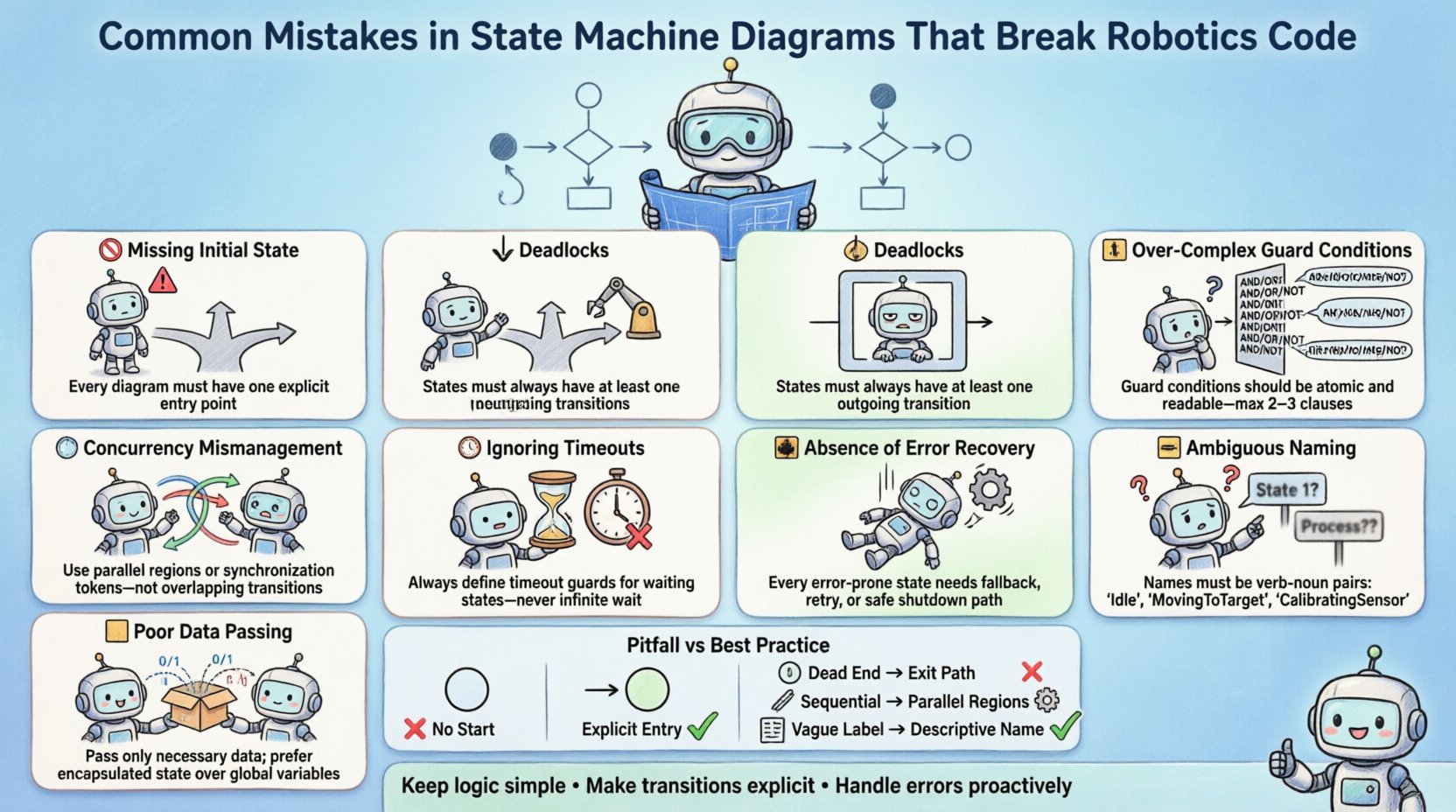
Tabela: Typowe pułapki wobec najlepszych praktyk
| Obszar | Pułapka | Najlepsza praktyka |
|---|---|---|
| Punkt wejścia | Nie zdefiniowano stanu początkowego | Jawny punkt wejścia z logiką inicjalizacyjną |
| Kontrola przepływu | Zawieszenia spowodowane brakującymi przejściami | Upewnij się, że każdy stan ma ścieżkę wyjścia |
| Równoległość | Sekwencyjne przetwarzanie zadań równoległych | Użyj regionów równoległych dla niezależnych działań |
| Logika | Złożone warunki strażnika | Przenieś logikę do akcji stanu, utrzymaj strażniki proste |
| Czas | Brak limitów czasu w stanach oczekiwania | Zaimplementuj zegary nadzorujące i zegary wewnętrzne |
| Niezawodność | Brakujące stany błędów | Jawne zdefiniowanie stanów bezpiecznych i odzyskiwania |
| Dane | Niejawne współużytkowanie globalnych danych | Przekazuj dane jawnie poprzez parametry przejścia |
| Dokumentacja | Niejasne nazwy stanów | Używaj opisowych, spójnych konwencji nazewnictwa |
Kwestie implementacji
Po zakończeniu projektu diagramu, jego przekład na kod wymaga ostrożności. Model powinien kierować implementacją, a nie na odwrót. Modyfikowanie kodu w celu obejścia ograniczenia maszyny stanów często prowadzi do długu technicznego.
Generator kodu może pomóc w wypełnieniu tej luki. Zapewniają one dokładne dopasowanie środowiska uruchomieniowego do projektu. Jednak poleganie wyłącznie na generowaniu bez zrozumienia logiki podstawowej jest ryzykowne. Inżynierowie muszą potrafić czytać wygenerowany kod i potwierdzać, że odpowiada on intencji diagramu.
Testowanie maszyny stanów
Testy jednostkowe są kluczowe. Każdy stan i przejście powinny być weryfikowane niezależnie. Testy integracyjne zapewniają, że zmiany stanów nie powodują skutków ubocznych w innych częściach systemu.
- Testowanie przejść: Upewnij się, że określone wejścia wywołują odpowiednie zmiany stanu.
- Weryfikacja stanu: Upewnij się, że system pozostaje w stanie, aż nie nastąpi ważna warunku wyjścia.
- Testowanie obciążeniowe: Uruchom system pod obciążeniem, aby sprawdzić problemy z czasem lub warunki wyścigu.
Środowiska symulacji pozwalają na bezpieczne testowanie trybów awarii. Inżynierowie mogą wprowadzać awarie czujników lub opóźnienia komunikacji, aby zobaczyć, jak maszyna stanów reaguje, nie ryzykując sprzętu.
Koszt złego modelowania
Naprawianie maszyny stanów na schemacie jest tanie. Naprawianie jej w wdrożonym kodzie jest kosztowne. W robotyce błąd logiczny może oznaczać uszkodzenie fizyczne robota lub środowiska. Może również oznaczać obrażenia operatorów.
Inwestowanie czasu w rygorystyczny proces projektowania przynosi korzyści w postaci stabilności. Dobrze dokumentowana maszyna stanów stanowi jedyny źródło prawdy dla całego zespołu rozwojowego. Ułatwia lepszą współpracę między inżynierami sprzętu i oprogramowania.
Podsumowanie kluczowych wniosków
Tworzenie niezawodnego kodu robotycznego zaczyna się od solidnego modelu. Unikanie typowych pułapek, takich jak brak stanów początkowych, zakleszczenia i złe zarządzanie współbieżnością, jest kluczowe. Wytrzymałe obsługę błędów i jasne mechanizmy przekazywania danych zapewniają, że system może odzyskać się po nieoczekiwanych sytuacjach.
Przestrzeganie tych zasad pozwala programistom tworzyć maszyny stanów, które są nie tylko funkcjonalne, ale również odpornościowe. Różnica między prototypem a produktem często leży w jakości logiki sterowania. Uwaga na szczegóły w fazie projektowania zapobiega problemom w fazie wdrażania.
Utrzymuj logikę prostą. Robiąc przejścia jawne. Obsługuj błędy proaktywnie. Te praktyki stanowią fundament niezawodnych systemów robotycznych.
