











Di bidang sistem tertanam dan robotika otonom, mengelola perilaku kompleks membutuhkan lebih dari sekadar pernyataan kondisional sederhana. Diagram Mesin Status yang jelas menawarkan pendekatan terstruktur untuk memodelkan perilaku dinamis suatu sistem. Panduan ini menyajikan studi kasus komprehensif yang berfokus pada desain logika kontrol untuk drone otonom menggunakan prinsip-prinsip Diagram Mesin Status UML. Kita akan mengeksplorasi cara menentukan status, mengelola transisi, menangani peristiwa, serta memastikan operasi yang tangguh di bawah kendala dunia nyata.
Memahami Diagram Mesin Status dalam UML 📐
Diagram Mesin Status, sering disebut sebagai Diagram Chart Status dalam UML 2.0, mewakili status diskret dari suatu objek atau sistem serta transisi antara status-status tersebut. Berbeda dengan diagram kelas statis, model ini menangkap perilaku temporal sistem. Ini sangat berguna untuk sistem reaktif di mana output tergantung pada status saat ini dan peristiwa yang masuk.
Komponen kunci meliputi:
- Status:Suatu kondisi atau situasi selama masa hidup suatu objek di mana objek tersebut memenuhi suatu kondisi, melakukan aktivitas tertentu, atau menunggu suatu peristiwa.
- Transisi:Suatu hubungan antara dua status yang menunjukkan bahwa objek dalam status pertama akan berpindah ke status kedua ketika suatu peristiwa tertentu terjadi dan kondisi tertentu terpenuhi.
- Peristiwa:Suatu kejadian penting, seperti penerimaan sinyal, berlalunya waktu, atau pengecualian, yang memicu suatu transisi.
- Kondisi Penjaga:Ekspresi Boolean yang harus benar agar transisi dapat terjadi.
- Aksi:Perhitungan atau aktivitas yang dilakukan saat memasuki, keluar dari, atau selama suatu transisi.
Menggunakan notasi ini memungkinkan insinyur untuk memvisualisasikan alur kontrol tanpa terjebak dalam sintaks kode. Ini berfungsi sebagai gambaran rancangan untuk implementasi, memastikan semua perilaku sistem yang mungkin terjadi telah dipertimbangkan sebelum menulis satu baris kode eksekusi pun.
Studi Kasus: Drone Pengiriman Otonom 🚁
Bayangkan sebuah drone quadcopter yang dirancang untuk pengiriman paket terakhir di lingkungan perkotaan. Sistem ini harus beroperasi secara otonom tetapi memerlukan pengawasan manusia untuk peristiwa kritis tertentu. Drone ini dilengkapi dengan GPS, sistem manajemen baterai, sensor penghindaran rintangan, dan modul komunikasi. Logika kontrol harus mampu menangani operasi normal, navigasi, serta berbagai mode kegagalan.
Tantangan desain melibatkan memastikan drone tidak mencoba lepas landas dengan baterai rendah, tidak kehilangan koneksi tanpa kembali ke rumah, dan mendarat dengan aman dalam keadaan darurat. Skrip linier akan sulit dipelihara dan rentan terhadap kondisi persaingan. Mesin Status menyediakan hierarki operasi yang jelas.
Menentukan Status Inti ⚙️
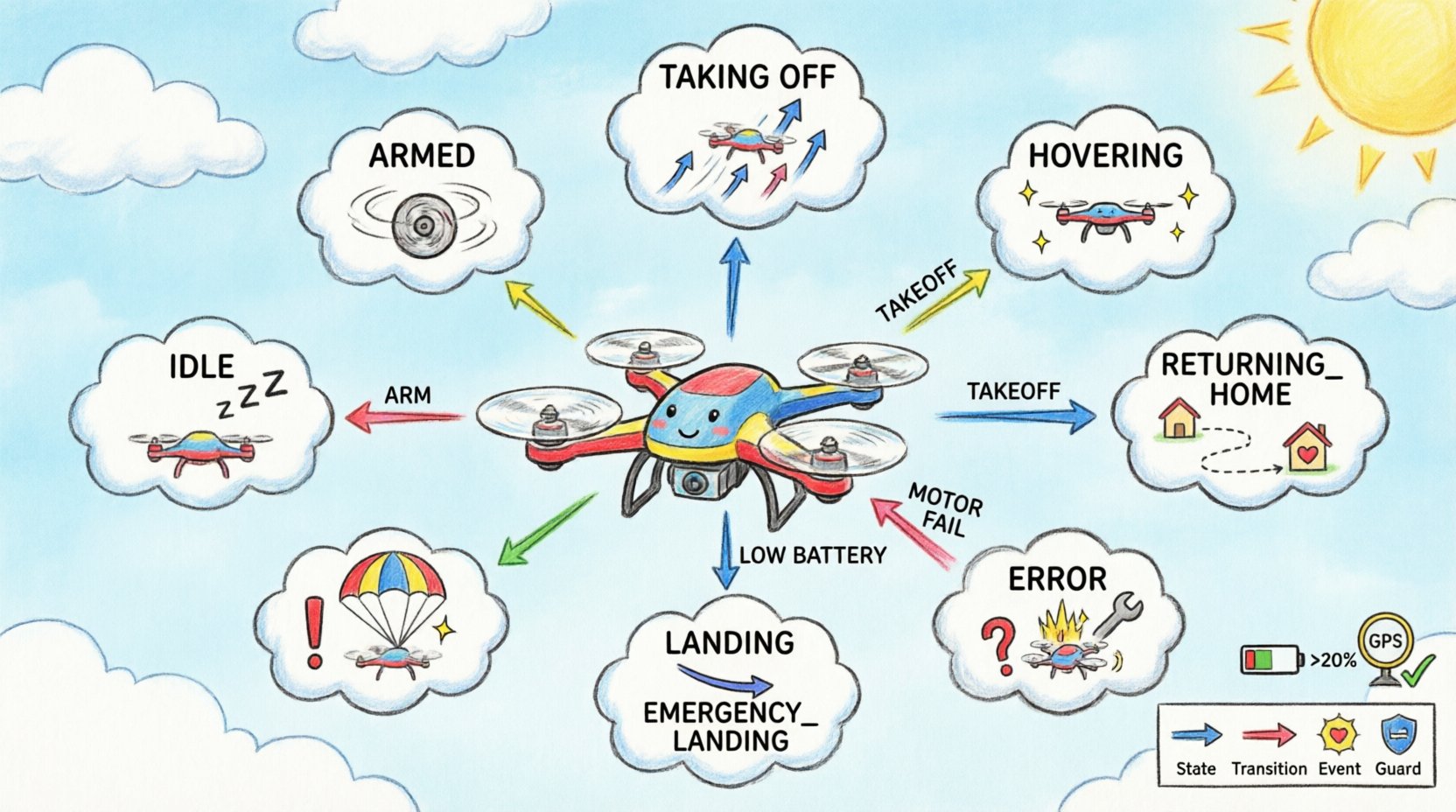
Langkah pertama dalam proses desain adalah mengidentifikasi mode operasi yang berbeda. Untuk drone ini, kita menentukan status utama berikut. Setiap status mewakili tahap tertentu dalam misi.
- IDLE:Drone menyala tetapi belum siap. Ia menunggu perintah untuk memulai misi.
- SIAP:Motor sedang berputar, dan drone siap lepas landas. Ia belum berada di udara.
- LEPAS LANDAS:Drone sedang naik dari tanah menuju ketinggian melayang yang stabil.
- MELAYANG:Drone diam di udara, mempertahankan posisinya.
- MENYUSUR: Drone sedang bergerak aktif antar titik-titik tujuan untuk mengantarkan beban.
- KEMBALI KE TEMPAT PELUNCURAN: Drone sedang terbang kembali ke lokasi peluncuran karena baterai rendah atau kehilangan sinyal.
- MELANDA: Drone sedang turun dari udara ke tanah.
- MELANDA DARURAT: Turun mendadak dan paksa akibat kegagalan kritis (misalnya, kegagalan motor).
- KESALAHAN: Status umum untuk kesalahan yang tidak ditangani atau reset sistem.
Perhatikan bahwa status seperti IDLE dan KESALAHAN adalah terminal atau hampir terminal. Setelah sistem memasuki KESALAHAN, sistem tidak dapat melanjutkan ke MENYUSUR tanpa reset manual. Ini mencegah drone mencoba terbang saat dalam kondisi rusak.
Logika Transisi dan Pemicu Peristiwa 📡
Transisi mendefinisikan bagaimana sistem berpindah antar status yang tercantum di atas. Gerakan-gerakan ini dipicu oleh peristiwa seperti masukan pengguna, bacaan sensor, atau timer internal. Tabel di bawah ini menjelaskan transisi penting yang diperlukan untuk logika kontrol.
| Peristiwa | Status Sumber | Status Tujuan | Kondisi Pengaman |
|---|---|---|---|
| PERINTAH_PEMASANGAN | IDLE | SIAP | Baterai > 20% |
| PELUNCURAN_SELESAI | SIAP | LEPAS LANDAS | Sensor Ketinggian Aktif |
| MENCAPAI MENGAPUNG | LEPAS LANDAS | MENGAPUNG | Ketinggian = 1,5m |
| MULAI MISI | MENGAPUNG | MENYUSUR | Kunci GPS = Benar |
| BATERAI RENDAH | MENYUSUR | KEMBALI KE RUMAH | Baterai < 30% |
| KEHILANGAN SINYAL | MENYUSUR | KEMBALI KE RUMAH | Waktu > 5 detik tanpa sinyal |
| MENCAPAI RUMAH | KEMBALI KE RUMAH | MELANDA | Jarak = 0m |
| MENYENTUH BUMI | MELANDA | TIDAK BERGERAK | Ketinggian = 0m |
| KEGAGALAN MOTOR | Apa saja | MELANDA DARURAT | Arus < 0A |
Perhatikan bahwa KEGAGALAN_MOTOR acara memiliki status sumber dari Setiap. Ini dikenal sebagai transisi ortogonal atau interupsi. Terlepas dari apakah drone berada dalam IDLE atau MENYUSUR, kegagalan motor kritis memaksa perubahan status segera ke PENYARANGAN_EMERGENSI. Ini memastikan keselamatan diprioritaskan daripada kelanjutan misi.
Kondisi Pengaman dan Tindakan 🛑
Transisi tidak selalu bersyarat. Kondisi pengaman berfungsi sebagai pemeriksaan keselamatan. Sebagai contoh, pengguna tidak dapat memulai urutan lepas landas jika baterai sangat rendah. Kondisi pengaman Baterai > 20% mencegah transisi dari IDLE ke SIAP.
Selain itu, transisi sering memicu tindakan. Tindakan-tindakan ini dieksekusi saat transisi terjadi atau saat berada dalam status tertentu.
- Tindakan Masuk: Kode yang dieksekusi segera setelah memasuki suatu status. Untuk status LEPAS_LANDAS status, tindakan masuk bisa berupa mengatur dorongan motor ke 60% dan menginisialisasi pengontrol PID ketinggian.
- Tindakan Keluar: Kode yang dieksekusi segera setelah meninggalkan suatu status. Saat keluar dari MENGAPUNG, sistem mungkin menghentikan pengikut titik tujuan untuk mencegah perintah yang saling bertentangan.
- Lakukan Kegiatan: Kode yang dieksekusi terus-menerus saat berada dalam suatu status. Dalam status MENYUSUR keadaan, sebuah Lakukanaktivitas ini melibatkan pembacaan data GPS secara terus-menerus dan menyesuaikan kecepatan motor untuk mempertahankan jalur penerbangan.
Pertimbangkan KEMBALI KE RUMAHkeadaan. Saat memasuki keadaan ini, drone harus menghitung vektor kembali ke titik rumah. Saat keluar dari keadaan ini, drone harus menghapus vektor kembali. Ini memastikan bahwa jika drone beralih kembali ke MENYUSUR (mungkin karena pengguna kembali mengendalikan drone), logika kembali tidak akan mengganggu logika misi.
Desain State Hierarkis (State Komposit) 🏗️
Mesin state datar dapat menjadi sulit dikelola seiring meningkatnya kompleksitas. Mesin state hierarkis memungkinkan state berisi sub-state. Ini sangat berguna untuk keadaan MENYUSURkeadaan. Navigasi bukan satu tindakan tunggal; melainkan kumpulan perilaku.
Kita dapat mendefinisikan MENYUSURsebagai state komposit dengan sub-state internal berikut:
- MENGIKUTI TITIK TUJUAN:Mode standar di mana drone bergerak antar titik.
- MENGHINDARI TABRAKAN:Keadaan yang dimasuki saat rintangan terdeteksi.
- STABILISASI:Keadaan tingkat rendah yang mengelola keseimbangan motor saat terjadi angin kencang.
Transisi antara sub-state ini terjadi tanpa meninggalkan parent MENYUSURkeadaan. Sebagai contoh, jika rintangan terdeteksi, sistem beralih dari MENGIKUTI TITIK TUJUANke MENGHINDARI TABRAKAN. Keadaan induk tetap aktif, mempertahankan konteks misi secara keseluruhan. Setelah rintangan dihilangkan, sistem kembali ke MENGIKUTI TITIK TUJUAN.
Struktur ini mengurangi redundansi. Tindakan umum untuk navigasi, seperti memperbarui log telemetri, dapat didefinisikan pada tingkat induk daripada diulang di setiap sub-state. Ini juga meningkatkan kejelasan dengan mengelompokkan perilaku yang terkait bersama secara visual.
Pertimbangan Implementasi untuk Sistem Embedded 💻
Menerjemahkan diagram mesin status menjadi kode yang dapat dieksekusi memerlukan perhatian terhadap batasan perangkat keras sistem tertanam. Kontroler penerbangan drone biasanya berjalan pada mikrokontroler dengan RAM dan siklus CPU yang terbatas.
- Efisiensi Memori: Hindari menyimpan seluruh riwayat status. Hanya lacak status saat ini. Gunakan enumerasi atau bilangan bulat untuk mewakili status agar penggunaan memori diminimalkan.
- Responsivitas Real-Time: Transisi harus terjadi secara deterministik. Jika PENYELAMATAN DARURAT peristiwa dipicu, kode tidak boleh menunggu tugas yang berjalan lama selesai. Interupsi harus ditangani di luar loop status utama atau dengan prioritas tinggi.
- Konsistensi Status: Pastikan tidak ada status yang memiliki perilaku tak terdefinisi. Setiap peristiwa yang mungkin harus memiliki transisi yang didefinisikan. Jika terjadi peristiwa yang tidak diharapkan, sistem harus beralih ke status ERROR status daripada mengalami kegagalan atau macet.
- Pencatatan: Implementasikan mekanisme pencatatan status. Saat terjadi transisi, catat waktu, status sumber, status tujuan, dan peristiwa ke memori non-volatil. Ini sangat penting untuk analisis setelah penerbangan.
Sebagai contoh, saat mengimplementasikan status LEPAS LANDAS status, kode tidak boleh diblokir. Harus menggunakan timer non-blokir untuk memantau ketinggian. Jika ketinggian tidak meningkat dalam waktu yang ditentukan, harus memicu peristiwa timeout dan beralih ke ERROR.
Strategi Pengujian dan Verifikasi 🧪
Sebelum menempatkan drone, logika mesin status harus diverifikasi. Simulasi adalah metode yang paling efisien dari segi biaya. Dengan membuat simulator perangkat lunak yang meniru input sensor, insinyur dapat menguji setiap jalur yang mungkin melalui diagram status tanpa mengancam perangkat keras.
Kegiatan pengujian utama meliputi:
- Pengujian Batas: Uji transisi yang bergantung pada ambang tertentu. Sebagai contoh, verifikasi bahwa transisi ke KEMBALI KE RUMAH terjadi tepat ketika baterai turun di bawah 30%, bukan pada 29% atau 31%.
- Cakupan Jalur: Pastikan setiap garis transisi dalam diagram dilalui setidaknya sekali selama pengujian. Ini memastikan bahwa logika untuk setiap peristiwa berfungsi.
- Pengujian Interupsi: Simulasikan peristiwa yang seharusnya mengganggu status saat ini. Verifikasi bahwa sistem keluar dengan benar MENYUSUR dan memasuki PENYALAHAN DARURAT bahkan jika perhitungan panjang sedang berjalan.
- Pengujian Reset: Verifikasi bahwa sistem dapat pulih dari status ERROR status. Dapatkah direset secara manual ke IDLE tanpa siklus daya fisik?
Alat pemeriksa model juga dapat digunakan. Alat-alat ini secara matematis memverifikasi bahwa mesin status tidak mengandung deadlock (status di mana tidak ada transisi yang mungkin) atau status yang tidak dapat diakses (status yang tidak dapat dimasuki dari status awal).
Kesalahan Umum yang Harus Dihindari ⚠️
Bahkan dengan diagram yang dirancang dengan baik, kesalahan implementasi dapat terjadi. Berikut ini adalah masalah umum yang diamati pada sistem kontrol drone.
- Transisi yang Hilang: Mudah untuk melupakan transisi untuk peristiwa tertentu. Misalnya, apa yang terjadi jika baterai mati saat berada di PENYALAHAN DARURAT? Drone harus tetap menjalankan turun kontrol atau logika perlindungan jatuh bebas.
- Kerancuan Status: Menggunakan terlalu banyak status yang mirip. Misalnya, memiliki kedua MENGANGKAT dan MENUNGGU dapat membingungkan. Gabungkan jika perilakunya identik.
- Operasi yang Menghambat: Jangan gunakan kode yang menghambat di dalam tindakan status. Jika suatu tindakan menunggu sensor, seluruh mesin status akan membeku. Gunakan callback asinkron atau bendera sebagai gantinya.
- Putaran yang Tidak Diinginkan: Pastikan tidak ada putaran tak terbatas dari status yang menghabiskan siklus CPU tanpa melakukan pekerjaan yang bermanfaat. Misalnya, putaran antara ERROR dan IDLE tanpa perintah reset akan menyebabkan kerusakan.
Ringkasan Manfaat 🏆
Mendesain sistem kontrol drone menggunakan Diagram Mesin Status memberikan keunggulan signifikan dibandingkan pemrograman prosedural tradisional. Ini menerapkan pemisahan tanggung jawab yang jelas, membuat kode lebih mudah dibaca dan didebug. Dengan secara eksplisit mendefinisikan status dan transisi, pengembang memastikan sistem berperilaku secara terduga dalam semua skenario.
Pendekatan ini memfasilitasi kolaborasi antara tim perangkat keras dan perangkat lunak. Diagram ini berfungsi sebagai bahasa bersama. Insinyur perangkat keras dapat melihat kapan sensor diambil data, dan insinyur perangkat lunak dapat melihat kapan aktuator diperintahkan. Ini juga menyederhanakan onboarding anggota tim baru, karena logika divisualisasikan alih-alih tersembunyi dalam struktur kode yang rumit.
Pada akhirnya, investasi dalam merancang mesin status yang kuat membayar dalam hal keandalan. Drone otonom adalah sistem yang kompleks, dan mengelola perilakunya membutuhkan metodologi yang disiplin. Dengan mematuhi standar UML dan merencanakan transisi, penjaga, dan tindakan secara cermat, insinyur dapat membangun sistem yang aman, mudah dirawat, dan efisien. Studi kasus ini menunjukkan bahwa meskipun logikanya kompleks, struktur ini memberikan kejelasan dan kendali atas perilaku otonom.
