











W dziedzinie systemów wbudowanych i robotyki autonomicznej zarządzanie złożonym zachowaniem wymaga więcej niż prostych instrukcji warunkowych. Dobrze zdefiniowany diagram maszyny stanów oferuje strukturalny sposób modelowania zachowania dynamicznego systemu. Niniejszy przewodnik przedstawia kompleksowy przykład studium przypadku skupiony na projektowaniu logiki sterowania dla drona autonomicznego z wykorzystaniem zasad UML dla maszyn stanów. Przeanalizujemy, jak definiować stany, zarządzać przejściami, obsługiwać zdarzenia oraz zapewniać niezawodne działanie w warunkach rzeczywistych.
Zrozumienie diagramów maszyn stanów w UML 📐
Diagram maszyny stanów, często nazywany diagramem wykresu stanów w UML 2.0, przedstawia dyskretne stany obiektu lub systemu oraz przejścia między nimi. W przeciwieństwie do statycznego diagramu klas, ten model uchwytuje zachowanie czasowe systemu. Jest szczególnie przydatny dla systemów reaktywnych, gdzie wyjście zależy od aktualnego stanu i nadchodzących zdarzeń.
Główne składniki to:
- Stan: Stan warunku lub sytuacji w trakcie życia obiektu, podczas którego spełnia pewien warunek, wykonuje pewną czynność lub oczekuje na zdarzenie.
- Przejście: Związek między dwoma stanami wskazujący, że obiekty w pierwszym stanie przejdą do drugiego stanu, gdy wystąpi określone zdarzenie i spełnione zostaną pewne warunki.
- Zdarzenie: Istotne zdarzenie, takie jak otrzymanie sygnału, upłynięcie czasu lub wyjątek, które wywołuje przejście.
- Warunek strażnika: Wyrażenie logiczne, które musi być prawdziwe, aby przejście mogło nastąpić.
- Działanie: Obliczenie lub czynność wykonywana podczas wejścia do stanu, wyjścia z niego lub podczas przejścia.
Użycie tej notacji pozwala inżynierom wizualizować przepływ sterowania bez zagubienia w składni kodu. Służy jako projekt implementacji, zapewniając, że wszystkie możliwe zachowania systemu zostaną uwzględnione przed napisaniem jednej linii kodu wykonywalnego.
Przykład studium przypadku: Dron do dostaw autonomicznych 🚁
Wyobraźmy sobie drona czteromotorowego przeznaczonego do dostaw na ostatnim odcinku w środowisku miejskim. Ten system musi działać autonomicznie, ale wymaga nadzoru ludzkiego w przypadku określonych krytycznych zdarzeń. Dron jest wyposażony w GPS, systemy zarządzania baterią, czujniki unikania przeszkód oraz moduł komunikacyjny. Logika sterowania musi obsługiwać normalne działanie, nawigację oraz różne tryby awaryjne.
Wyzwaniem projektowym jest zapewnienie, by dron nie próbował wznosić się z niskim poziomem baterii, nie stracił połączenia bez powrotu do domu oraz bezpiecznie lądował w sytuacji awaryjnej. Liniowy skrypt byłby trudny w utrzymaniu i podatny na warunki wyścigu. Maszyna stanów zapewnia jasną hierarchię operacji.
Definiowanie podstawowych stanów ⚙️
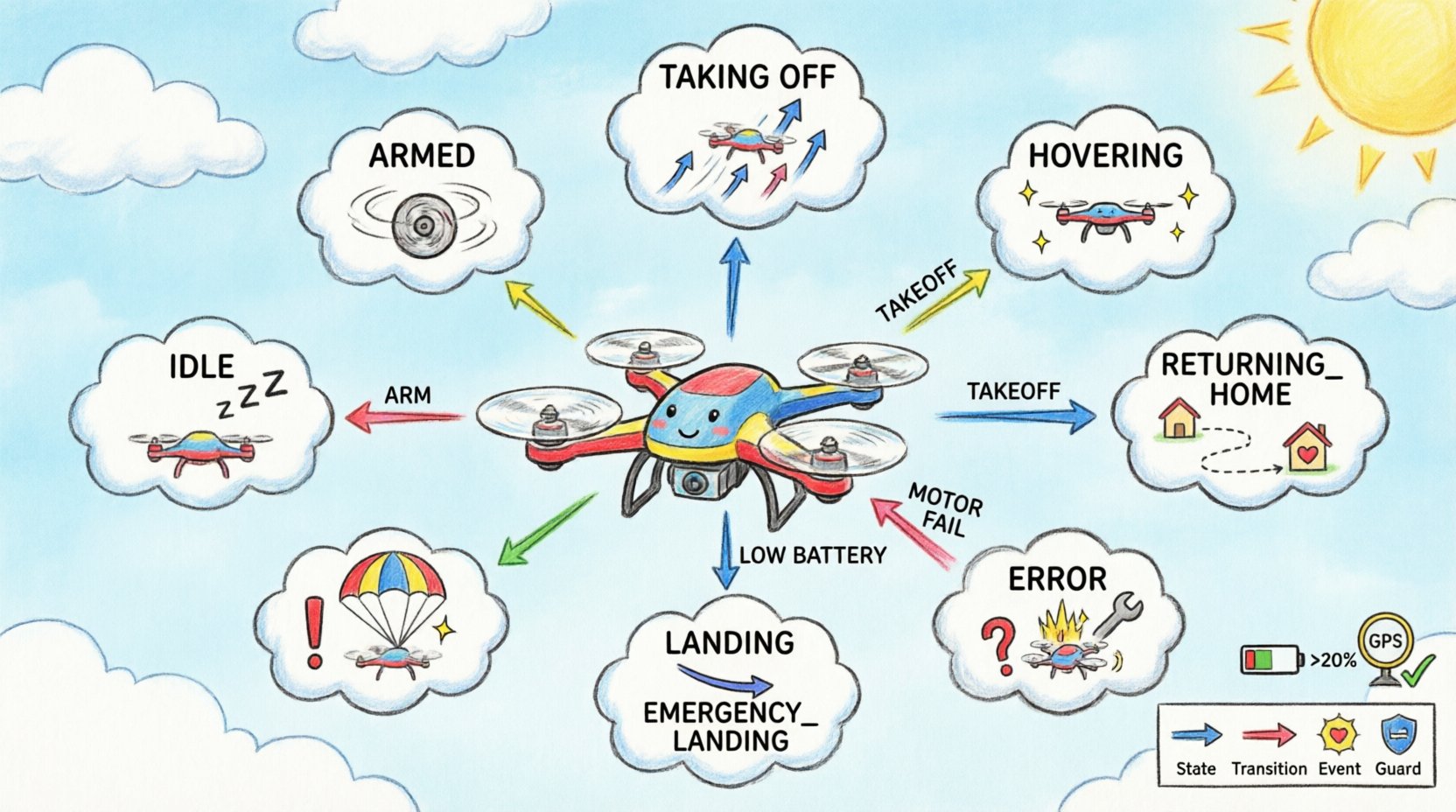
Pierwszym krokiem w procesie projektowania jest identyfikacja różnych trybów działania. Dla tego drona definiujemy następujące podstawowe stany. Każdy stan reprezentuje określoną fazę misji.
- OCZEKIWANIE: Dron jest włączony, ale nie jest gotowy do startu. Czeka na polecenie rozpoczęcia misji.
- PRZYGOTOWANY: Silniki są w ruchu, a dron jest gotowy do startu. Nadal nie jest w powietrzu.
- WZNOSZENIE: Dron wznosi się z ziemi do stabilnej wysokości wznoszenia.
- WZNOSZENIE: Dron jest nieruchomy w powietrzu, utrzymując pozycję.
- NAWIGACJA: Dron aktywnie porusza się między punktami nawigacyjnymi w celu dostarczenia obciążenia.
- POWROT DO DOMU: Dron leci z powrotem do miejsca startowego z powodu niskiego poziomu baterii lub utraty sygnału.
- LĄDOWANIE: Dron opuszcza się z powietrza na ziemię.
- NADZOROWANE LĄDOWANIE: Natychmiastowe, wymuszone zniżanie spowodowane krytycznym awarią (np. uszkodzenie silnika).
- BŁĄD: Stan ogólne przeznaczony dla nieobsłużonych błędów lub ponownych uruchomień systemu.
Zwróć uwagę, że stany takie jak NIEAKTYWNY i BŁĄD są stanami końcowymi lub quasi-końcowymi. Po wejściu systemu w BŁĄD, nie może przejść do NAWIGACJI bez ręcznego ponownego uruchomienia. Zapobiega to próbom lotu drona w stanie awarii.
Logika przejść i wyzwalacze zdarzeń 📡
Przejścia definiują sposób, w jaki system przechodzi między stanami wymienionymi powyżej. Te ruchy są wyzwalane zdarzeniami takimi jak dane od użytkownika, odczyty czujników lub wewnętrzne zegary. Poniższa tabela przedstawia kluczowe przejścia wymagane dla logiki sterowania.
| Zdarzenie | Stan źródłowy | Stan docelowy | Warunek ochronny |
|---|---|---|---|
| PODANIE_KOMENDY_ARM | NIEAKTYWNY | ZABLOKOWANY | Bateria > 20% |
| POWODZONY_START | ZABLOKOWANY | WYŁĄCZANIE | Czujnik wysokości aktywny |
| OSIĄGNIĘCIE WISZENIA | WYŁĄCZANIE | WISZENIE | Wysokość = 1,5 m |
| ROZPOCZĘCIE MISJI | WISZENIE | NAWIGACJA | Zablokowany GPS = Prawda |
| NISKIE NAPIĘCIE BATERII | NAWIGACJA | POWRÓT DO DOMU | Bateria < 30% |
| PRZERWANIE SYGNAŁU | NAWIGACJA | POWRÓT DO DOMU | Czas > 5 s bez sygnału |
| OSIĄGNIĘCIE DOMU | POWRÓT DO DOMU | LĄDOWANIE | Odległość = 0 m |
| STYCZENIE ZE ZIEMIĄ | LĄDOWANIE | NIEAKTYWNE | Wysokość = 0 m |
| AWARIA SILNIKA | Dowolny | AWARYJNE LĄDOWANIE | Prąd < 0 A |
Zwróć uwagę, że zdarzenie AWARIA_MOTORA ma stan źródłowy Dowolny. Jest to tzw. przejście ortogonalne lub przerwanie. Niezależnie od tego, czy dron jest w stanie NIEAKTYWNY lub NAWIGUJĄCY, krytyczna awaria motora wymusza natychmiastową zmianę stanu na AWARYJNE LĄDOWANIE. Zapewnia to, że bezpieczeństwo ma pierwszeństwo przed ciągłością misji.
Warunki zabezpieczające i działania 🛑
Przejścia nie są zawsze bezwarunkowe. Warunki zabezpieczające działają jak kontrole bezpieczeństwa. Na przykład użytkownik nie może rozpocząć sekwencji startu, jeśli bateria jest krytycznie niska. Warunek zabezpieczający Bateria > 20% zapobiega przejściu z NIEAKTYWNY do ZABLOKOWANY.
Dodatkowo przejścia często wywołują działania. Te działania są wykonywane w momencie wystąpienia przejścia lub podczas przebywania w określonym stanie.
- Działanie wejściowe: Kod wykonywany natychmiast po wejściu do stanu. Dla stanu WYBIEGANIE stan może być ustawienie ciągu silnika na 60% i zainicjowanie regulatora PID wysokości.
- Działanie wyjściowe: Kod wykonywany natychmiast po opuszczeniu stanu. Podczas opuszczenia WISZENIE, system może zatrzymać śledzenie punktów nawigacyjnych, aby zapobiec konfliktom poleceń.
- Działanie wykonywane: Kod wykonywany ciągle podczas przebywania w stanie. W stanie NAWIGACJI stan, a Wykonajdziałanie polega na ciągłym odczytywaniu danych z GPS i dostosowywaniu prędkości silników w celu utrzymania trasy lotu.
Zastanów się nad POWRACANIE DO DOMUstanem. Po wejściu dron musi obliczyć wektor powrotu do punktu początkowego. Po wyjściu musi usunąć wektor powrotu. Zapewnia to, że jeśli dron wróci do NAWIGACJI (przynajmniej częściowo z powodu odzyskania kontroli przez użytkownika), logika powrotu nie będzie zakłócać logiki misji.
Projektowanie stanów hierarchicznych (stany złożone) 🏗️
Maszyny stanów płaskie mogą stać się trudne w obsłudze wraz ze wzrostem złożoności. Maszyny stanów hierarchicznych pozwalają na zawieranie stanów podstawowych. Jest to szczególnie przydatne dla stanu NAWIGACJIstanu. Nawigacja nie jest pojedynczą czynnością; jest to zbiór zachowań.
Możemy zdefiniować NAWIGACJI jako stan złożony z następującymi stanami wewnętrznymi:
- ŚLEDZENIE PUNKTÓW TRASY: Standardowy tryb, w którym dron porusza się między punktami.
- UNIKANIE ZDERZEŃ: Stan wejścia, gdy wykryto przeszkodę.
- STABILIZACJA: Stan niskiego poziomu zarządzający równowagą silników podczas popychów wiatru.
Przejścia między tymi stanami podrzędnymi odbywają się bez opuszczenia stanu nadrzędnego NAWIGACJIstanu. Na przykład, jeśli wykryto przeszkodę, system przechodzi z ŚLEDZENIA PUNKTÓW TRASY do UNIKANIA ZDERZEŃ. Stan nadrzędny pozostaje aktywny, zachowując ogólny kontekst misji. Gdy przeszkoda zostanie usunięta, system wraca do ŚLEDZENIA PUNKTÓW TRASY.
Ta struktura zmniejsza nadmiarowość. Powszechne działania związane z nawigacją, takie jak aktualizacja dzienników telemetrii, mogą być zdefiniowane na poziomie nadrzędnym zamiast powtarzać je w każdym podstanowym. Zwiększa również przejrzystość, łącząc wizualnie powiązane zachowania.
Ważne aspekty implementacji dla systemów wbudowanych 💻
Przekładanie diagramu maszyny stanów na kod wykonywalny wymaga uwagi na ograniczenia sprzętu wbudowanego. Sterownik lotu drona zwykle działa na mikrokontrolerze z ograniczoną pamięcią RAM i cyklami procesora.
- Wydajność pamięci:Unikaj przechowywania pełnej historii stanów. Śledź tylko aktualny stan. Używanie wyliczenia lub liczby całkowitej do reprezentacji stanu minimalizuje zużycie pamięci.
- Reaktywność w czasie rzeczywistym: Przejścia muszą odbywać się deterministycznie. Jeśli AWARII_LĄDOWANIA zdarzenie zostanie wyzwolone, kod nie może czekać na zakończenie długotrwałej operacji. Przerwania powinny być obsługiwane poza główną pętlą stanów lub z wysokim priorytetem.
- Spójność stanów: Upewnij się, że żaden stan nie ma nieokreślonego zachowania. Każde możliwe zdarzenie musi mieć zdefiniowane przejście. Jeśli wystąpi nieoczekiwane zdarzenie, system powinien przejść do stanu BŁĄD zamiast awarii lub zawieszenia.
- Rejestrowanie: Zaimplementuj mechanizm rejestrowania stanów. Gdy nastąpi przejście, zapisz znacznik czasu, stan źródłowy, stan docelowy i zdarzenie do pamięci nieulotnej. Jest to kluczowe dla analizy po locie.
Na przykład, podczas implementacji stanu WYBIEGANIA kod nie powinien blokować. Powinien używać nieblokującego timera do monitorowania wysokości. Jeśli wysokość nie wzrośnie w ustalonym czasie, powinien wyzwolić zdarzenie przekroczenia czasu i przejść do BŁĄD.
Strategie testowania i weryfikacji 🧪
Zanim wdrożymy drona, logika maszyny stanów musi zostać zweryfikowana. Symulacja jest najtańszym rozwiązaniem. Tworząc symulator oprogramowania, który imituje dane z czujników, inżynierowie mogą przetestować każdą możliwą ścieżkę przez diagram stanów, nie ryzykując sprzętu.
Główne działania testowe obejmują:
- Testy graniczne: Testuj przejścia oparte na określonych progach. Na przykład zweryfikuj, czy przejście do POWRACANIA_DO_DOMU następuje dokładnie w momencie, gdy poziom baterii spadnie poniżej 30%, a nie na 29% lub 31%.
- Pokrycie ścieżek: Upewnij się, że każda linia przejścia na diagramie jest przesłonięta co najmniej raz podczas testowania. To potwierdza, że logika dla każdego zdarzenia działa poprawnie.
- Testowanie przerwań: Symuluj zdarzenia, które powinny przerwać bieżący stan. Upewnij się, że system poprawnie wyjście NAWIGACJA i przechodzi do AWARII_LĄDOWANIA nawet jeśli trwa długie obliczenie.
- Testowanie ponownego uruchomienia: Upewnij się, że system może odzyskać po stanie BŁĄD stanie. Czy można ręcznie zresetować do NIEAKTYWNY bez fizycznego ponownego uruchomienia zasilania?
Można również używać narzędzi do sprawdzania modeli. Te narzędzia matematycznie potwierdzają, że maszyna stanów nie zawiera zakleszczeń (stanów, w których nie ma możliwości przejścia) ani nieosiągalnych stanów (stanów, których nie można wejść z początkowego stanu).
Typowe pułapki do unikania ⚠️
Nawet przy dobrze zaprojektowanym diagramie mogą wystąpić błędy implementacji. Poniżej znajdują się typowe problemy obserwowane w systemach sterowania dronami.
- Brakujące przejścia: Łatwo zapomnieć o przejściu dla określonego zdarzenia. Na przykład, co się stanie, jeśli bateria się rozładuje podczas AWARII_LĄDOWANIA? Dron nadal musi wykonać kontrolowane spadanie lub logikę ochrony przed swobodnym spadaniem.
- Zmętka stanów: Używanie zbyt wielu podobnych stanów. Na przykład posiadanie zarówno WISZENIA jak i OCZEKIWANIA może być mylące. Połącz je, jeśli ich zachowania są identyczne.
- Operacje blokujące: Nie używaj blokującego kodu w akcji stanu. Jeśli akcja czeka na czujnik, cała maszyna stanów zamarza. Zamiast tego używaj asynchronicznych wywołań zwrotnych lub flag.
- Niechciane pętle: Upewnij się, że nie ma nieskończonych pętli stanów, które zużywają cykle procesora bez wykonywania użytecznej pracy. Na przykład pętla między BŁĄD i OCZEKIWANIE bez polecenia zresetowania spowoduje awarię.
Podsumowanie korzyści 🏆
Projektowanie systemu sterowania dronem przy użyciu diagramu maszyny stanów oferuje istotne zalety w porównaniu z tradycyjnym kodowaniem proceduralnym. Wymusza jasne rozdzielenie odpowiedzialności, co ułatwia czytanie i debugowanie kodu. Poprzez jawne definiowanie stanów i przejść programiści zapewniają, że system zachowuje się przewidywalnie we wszystkich sytuacjach.
Ten podejście ułatwia współpracę między zespołami sprzętowymi i programistycznymi. Diagram działa jako wspólny język. Inżynierowie sprzętowi mogą dokładnie zobaczyć, kiedy są pobierane dane z czujników, a inżynierowie oprogramowania mogą zobaczyć, kiedy są wydawane polecenia dla aktuatorów. Ułatwia również wdrażanie nowych członków zespołu, ponieważ logika jest wizualizowana, a nie ukryta w skomplikowanych strukturach kodu.
Na końcu inwestycja w projektowanie solidnej maszyny stanów opłaca się za sprawą niezawodności. Dron autonomiczny to złożony system, a zarządzanie jego zachowaniem wymaga dyscyplinowanego podejścia. Przestrzegając standardów UML i starannie planując przejścia, warunki i działania, inżynierowie mogą tworzyć systemy, które są bezpieczne, łatwe w utrzymaniu i wydajne. Ten przypadek badawczy pokazuje, że mimo skomplikowanej logiki struktura zapewnia przejrzystość i kontrolę nad zachowaniem autonomicznym.
