











組み込みシステムおよび自律ロボティクスの分野では、複雑な振る舞いを管理するには単純な条件分岐文以上のものが必要です。明確に定義されたステートマシン図は、システムの動的振る舞いをモデル化する構造的なアプローチを提供します。このガイドでは、UMLステートマシンの原則を用いて自律ドローンの制御論理の設計に焦点を当てた包括的な事例研究を提示します。状態の定義、遷移の管理、イベントの処理、現実世界の制約下でも堅牢な動作を確保する方法について探求します。
UMLにおけるステートマシン図の理解 📐
ステートマシン図は、UML 2.0ではしばしばステートチャート図と呼ばれるもので、オブジェクトまたはシステムの離散的な状態およびそれらの状態間の遷移を表します。静的なクラス図とは異なり、このモデルはシステムの時間的振る舞いを捉えます。出力が現在の状態と到着するイベントに依存する反応型システムにおいて特に有用です。
主な構成要素には以下が含まれます:
- 状態:オブジェクトの寿命中に、ある条件を満たす、ある活動を実行する、またはあるイベントを待つ状態。
- 遷移:2つの状態の間の関係で、特定のイベントが発生し、特定の条件が満たされたときに、最初の状態にあるオブジェクトが2番目の状態に移動することを示す。
- イベント:遷移をトリガーする重要な出来事、たとえば信号の受信、時間の経過、または例外など。
- ガード条件:遷移が発生するためには、真でなければならないブール式。
- アクション:状態に入ること、状態から出ること、または遷移中に実行される計算または活動。
この表記法を用いることで、エンジニアはコードの構文に迷うことなく制御フローを可視化できます。実装のための設計図として機能し、実行可能なコードを1行も書く前に、システムのすべての可能な振る舞いが考慮されていることを保証します。
事例研究:自律配達ドローン 🚁
都市環境における最終一マイルの荷物配達を目的とした四軸ドローンを想定してください。このシステムは自律的に動作する必要がありますが、特定の重要なイベントについては人間の監視が必要です。ドローンにはGPS、バッテリー管理システム、障害物回避センサー、通信モジュールが搭載されています。制御論理は通常の運用、ナビゲーション、さまざまな障害モードを処理しなければなりません。
設計上の課題は、バッテリー残量が低い状態で離陸を試みないこと、帰還せずに通信を失わないこと、緊急時に安全に着陸することを保証することです。線形スクリプトでは保守が難しく、競合状態の発生しやすいです。ステートマシンは、操作の明確な階層構造を提供します。
コア状態の定義 ⚙️
設計プロセスの最初のステップは、異なる運用モードを特定することです。このドローンの場合、以下の主要な状態を定義します。各状態はミッションの特定の段階を表します。
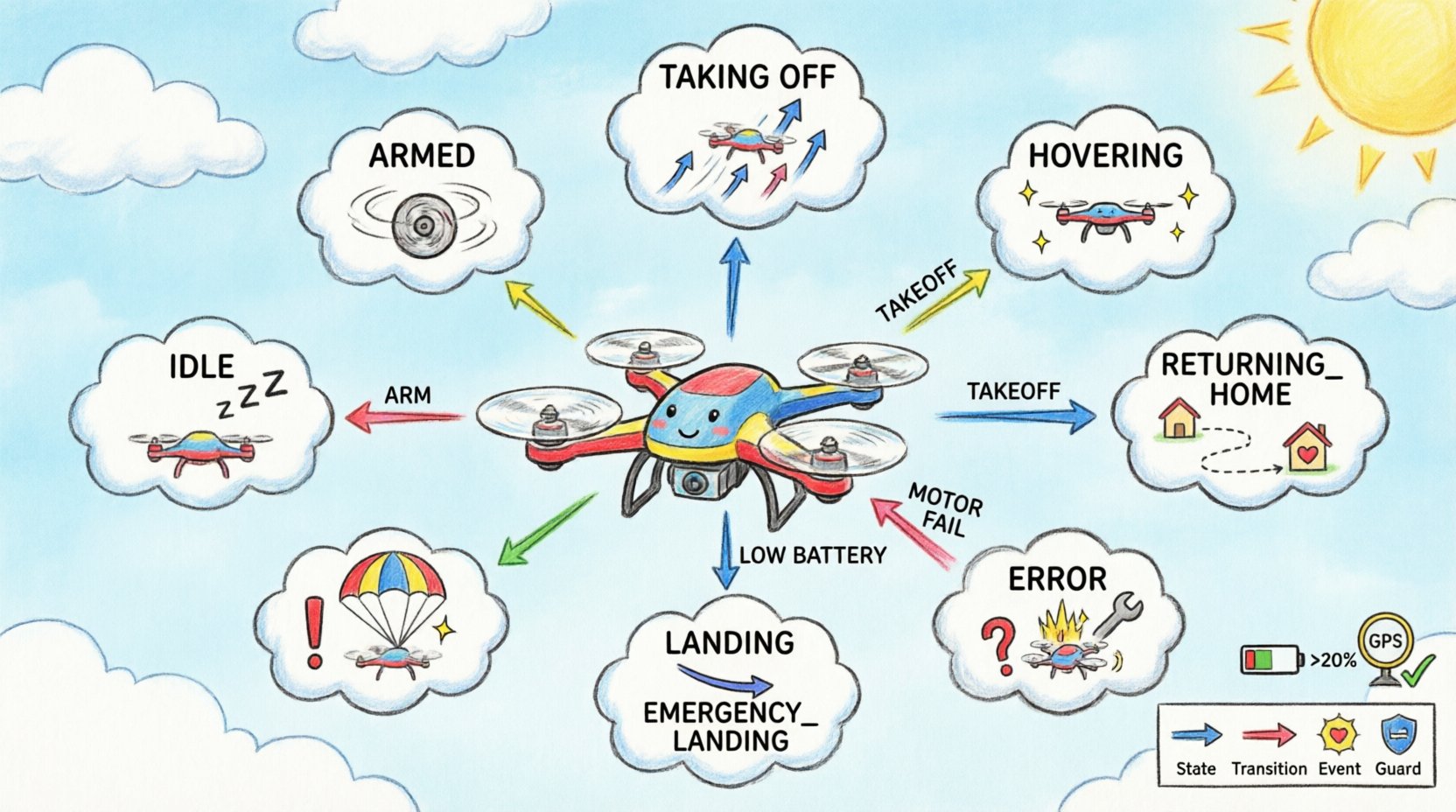
- IDLE:ドローンは電源はオンですが、アームされていません。ミッション開始の命令を待機しています。
- ARMED:モーターが回転しており、離陸準備ができています。まだ空中にありません。
- TAKING_OFF:ドローンは地上から安定したホバリング高度へ上昇しています。
- HOVERING:ドローンは空中で静止しており、位置を維持しています。
- NAVIGATING: ドローンはペイロードを配達するために、ウェイポイントの間を積極的に移動しています。
- ホームに戻る: ドローンはバッテリー残量が低いか、信号が失われたために発射地点に戻っています。
- 着陸: ドローンは空中から地上へ降下しています。
- 緊急着陸: 主要な故障(例:モーターの故障)により、即座に強制的に降下する。
- エラー:未処理の故障やシステムの再起動に対する包括的な状態。
以下の状態、例えばIDLE および ERROR は終端状態または準終端状態です。システムが ERROR に入ると、NAVIGATING 手動リセットを行わなければ、進行できません。これにより、故障状態でドローンが飛行を試みるのを防ぎます。
遷移論理とイベントトリガー 📡
遷移は、上記の状態間をシステムがどのように移動するかを定義します。これらの移動は、ユーザー入力、センサー読み取り、または内部タイマーなどのイベントによって引き起こされます。以下の表は、制御論理に必要な重要な遷移を概説しています。
| イベント | 元の状態 | 目標状態 | ガード条件 |
|---|---|---|---|
| ARM_COMMAND | IDLE | ARMED | バッテリー残量 > 20% |
| TAKEOFF_COMPLETE | ARMED | 離陸中 | 高度センサー作動中 |
| ホバリング到達 | 離陸中 | ホバリング中 | 高度 = 1.5m |
| ミッション開始 | ホバリング中 | 航行中 | GPSロック = 有効 |
| バッテリー残量不足 | 航行中 | 帰還中 | バッテリー残量 < 30% |
| 信号喪失 | 航行中 | 帰還中 | 信号なし時間 > 5秒 |
| 帰還地点到達 | 帰還中 | 着陸中 | 距離 = 0m |
| 着地 | 着陸中 | 待機中 | 高度 = 0m |
| モーター故障 | 任意 | 緊急着陸 | 電流 < 0A |
次のことを観察してください:モーター故障イベントの元の状態は任意です。これは直交遷移または割り込みと呼ばれます。ドローンがアイドルまたは航行中の状態にかかわらず、重大なモーター故障は直ちに緊急着陸に状態を変更させます。これにより、ミッションの継続性よりも安全が優先されます。
ガード条件とアクション 🛑
遷移は常に無条件ではありません。ガード条件は安全確認として機能します。例えば、バッテリー残量が深刻に低下している場合、ユーザーは離陸シーケンスを開始できません。ガード条件バッテリー残量 > 20%はアイドルからアームド.
さらに、遷移はしばしばアクションを引き起こします。これらのアクションは遷移が発生したとき、または特定の状態にいる間に実行されます。
- エントリーアクション:状態に入室した直後に実行されるコード。離陸中状態では、モーター推力を60%に設定し、高度PIDコントローラーを初期化するなどのエントリーアクションが行われるかもしれません。
- エグジットアクション:状態を離れる直後に実行されるコード。ホバリング中状態を離れる際、システムはウェイポイントフォロワーを停止して、衝突するコマンドを防ぐかもしれません。
- 実行アクティビティ:状態にいる間、継続的に実行されるコード。ナビゲーション 状態、a するこのアクティビティは、GPSデータを継続的に読み取り、モーターの回転数を調整して飛行経路を維持することを含む。
以下の状態を検討する。ホームに戻る状態。進入時にドローンはホームポイントへのベクトルを計算しなければならない。退出時に、戻るベクトルをクリアしなければならない。これにより、ドローンが再びナビゲーション(たとえばユーザーが再び制御を回復した場合)に切り替わったとしても、戻るロジックがミッションロジックに干渉しないことを保証する。
階層的状態設計(複合状態) 🏗️
平坦な状態機械は、複雑性が増すにつれて扱いにくくなる。階層的状態機械では、状態がサブ状態を含むことができる。これは特にナビゲーション状態に特に有用である。ナビゲーションは単一の行動ではなく、複数の行動の集合である。
以下のようにナビゲーションを以下の内部サブ状態を持つ複合状態として定義できる。
- ウェイポイント追従:ドローンがポイント間を移動する標準モード。
- 衝突回避:障害物が検出されたときに進入する状態。
- 安定化:風の突風時にモーターのバランスを管理する低レベルの状態。
これらのサブ状態間の遷移は、親状態ナビゲーションを離れないまま行われる。たとえば障害物が検出された場合、システムはウェイポイント追従から衝突回避へ遷移する。親状態はアクティブのまま維持され、全体のミッションコンテキストが保持される。障害物が除去されると、システムはウェイポイント追従.
この構造により冗長性が削減されます。ナビゲーションに共通する操作、たとえばテレメトリログの更新などは、親レベルで定義できるため、各サブステートで繰り返す必要がありません。また、関連する振る舞いを視覚的にまとめるため、明確性も向上します。
組み込みシステムにおける実装上の考慮事項 💻
状態機械図を実行可能なコードに変換するには、組み込みハードウェアの制約に注意を払う必要があります。ドローンの飛行制御装置は通常、限られたRAMとCPUサイクルを持つマイコン上で動作します。
- メモリ効率:完全な状態履歴を保存しないようにする。現在の状態のみを追跡する。状態を列挙型または整数で表現することで、メモリ使用量を最小限に抑える。
- リアルタイム応答性: 遷移は決定論的に発生しなければならない。もし緊急着陸イベントが発動した場合、長時間実行されるタスクの終了を待ってはならない。割り込みはメインステートループの外で処理するか、高い優先度で処理するべきである。
- 状態の一貫性: どの状態にも未定義の振る舞いがないことを確認する。すべての可能なイベントに対して定義された遷移が存在しなければならない。予期しないイベントが発生した場合、システムはクラッシュや停止せずにエラー状態に遷移すべきである。
- ログ記録:状態ログ記録メカニズムを実装する。遷移が発生した際には、タイムスタンプ、元の状態、目的の状態、およびイベントを非揮発性メモリに記録する。これは飛行後の分析にとって不可欠である。
たとえば、離陸状態を実装する際には、コードがブロックしてはならない。非ブロッキングタイマーを使用して高度を監視するべきである。設定された時間内に高度が上昇しなければ、タイムアウトイベントを発生させ、エラー.
テストおよび検証戦略 🧪
ドローンを展開する前に、状態機械の論理を検証しなければならない。シミュレーションは最もコスト効率の高い方法である。センサー入力を模倣するソフトウェアシミュレータを作成することで、ハードウェアを損傷するリスクを冒さずに、状態図を通過するすべての可能な経路をテストできる。
主なテスト活動には以下が含まれる:
- 境界テスト: 特定のしきい値に依存する遷移をテストする。たとえば、バッテリー残量が30%を下回ったときにのみ自宅帰還遷移が発生することを確認する。29%や31%では発生してはならない。
- 経路カバレッジ:テスト中に、図内のすべての遷移ラインが少なくとも1回は通過されることを確認する。これにより、すべてのイベントに対する論理が正常に動作していることが確認できる。
- インタラプトテスト: 現在の状態を中断すべきイベントをシミュレートする。システムが正しく終了することを確認する。ナビゲーション中 そして、緊急着陸 長時間の計算が実行中でも。
- リセットテスト: システムがエラー 状態から回復できることを確認する。手動でアイドル 物理的な電源サイクルなしでリセットできるか?
モデル検査ツールも利用できる。これらのツールは、状態機械にデッドロック(遷移が可能な状態がない状態)や到達不能状態(初期状態から到達できない状態)が含まれていないことを数学的に検証する。
避けるべき一般的な落とし穴 ⚠️
良好に設計された図であっても、実装エラーが発生する可能性がある。以下はドローン制御システムでよく見られる問題である。
- 遷移の漏れ: 特定のイベントに対する遷移を忘れてしまうのは簡単である。例えば、緊急着陸 の状態でバッテリーが切れたらどうなるか?ドローンは依然として制御された降下またはフリー落下保護ロジックを実行しなければならない。
- 状態の混乱: 同じような状態を多用すること。例えば、ホバリング と待機 があると混乱する可能性がある。動作が同じであれば、統合するべきである。
- ブロッキング操作: 状態アクション内にブロッキングコードを使用しないでください。アクションがセンサーの応答を待つ場合、状態機械全体が停止してしまう。代わりに非同期コールバックやフラグを使用する。
- 意図しないループ: CPUサイクルを消費するが有用な作業を行わない無限ループの状態が存在しないことを確認する。例えば、エラー と アイドルリセットコマンドなしではクラッシュを引き起こす。
メリットの概要 🏆
ステートマシン図を用いてドローン制御システムを設計することで、従来の手続き型コーディングよりも大きな利点が得られます。明確な関心の分離を強制することで、コードの読みやすさとデバッグのしやすさが向上します。状態と遷移を明示的に定義することで、開発者はシステムがすべてのシナリオにおいて予測可能に動作することを保証できます。
このアプローチは、ハードウェアチームとソフトウェアチームの連携を促進します。図は共有言語として機能します。ハードウェアエンジニアはセンサーがいつポーリングされるかを正確に把握でき、ソフトウェアエンジニアはアクチュエータがいつ命令されるかを確認できます。また、論理が複雑なコード構造に隠されているのではなく可視化されているため、新メンバーのオンボーディングも容易になります。
結局のところ、堅牢なステートマシンを設計するための投資は信頼性の向上という形で報われます。自律型ドローンは複雑なシステムであり、その挙動を管理するには厳密なアプローチが求められます。UMLの標準に従い、遷移、ガード、アクションを慎重に計画することで、安全で保守性が高く、効率的なシステムを構築できます。このケーススタディは、論理が複雑であっても、構造が自律的な挙動に対する明確な理解と制御を提供することを示しています。
