











Dans le domaine des systèmes embarqués et de la robotique autonome, la gestion du comportement complexe exige plus que des simples instructions conditionnelles. Un diagramme d’états bien défini offre une approche structurée pour modéliser le comportement dynamique d’un système. Ce guide présente une étude de cas complète centrée sur la conception de la logique de contrôle pour un drone autonome en utilisant les principes des diagrammes d’états UML. Nous explorerons comment définir des états, gérer les transitions, traiter les événements et assurer un fonctionnement robuste sous des contraintes du monde réel.
Comprendre les diagrammes d’états UML 📐
Un diagramme d’états, souvent appelé diagramme d’état dans UML 2.0, représente les états discrets d’un objet ou d’un système ainsi que les transitions entre ces états. Contrairement à un diagramme de classes statique, ce modèle capture le comportement temporel du système. Il est particulièrement utile pour les systèmes réactifs où la sortie dépend de l’état actuel et des événements entrants.
Les composants clés incluent :
- État : Une condition ou situation au cours de la vie d’un objet durant laquelle il satisfait une condition, effectue une activité ou attend un événement.
- Transition : Une relation entre deux états indiquant que les objets dans le premier état passeront au second état lorsqu’un événement spécifique se produit et que certaines conditions sont remplies.
- Événement : Un événement important, tel qu’une réception de signal, un délai écoulé ou une exception, qui déclenche une transition.
- Condition de garde : Une expression booléenne qui doit être vraie pour que la transition ait lieu.
- Action : Un calcul ou une activité effectuée lors de l’entrée, de la sortie ou pendant une transition.
Utiliser cette notation permet aux ingénieurs de visualiser le flux de contrôle sans se perdre dans la syntaxe du code. Elle sert de plan d’implémentation, garantissant que tous les comportements possibles du système sont pris en compte avant d’écrire une seule ligne de code exécutable.
L’étude de cas : Drone de livraison autonome 🚁
Considérons un drone quadricoptère conçu pour la livraison de colis en dernière étape dans un environnement urbain. Ce système doit fonctionner de manière autonome, mais nécessite une surveillance humaine pour certains événements critiques. Le drone est équipé d’un GPS, d’un système de gestion de la batterie, de capteurs d’évitement d’obstacles et d’un module de communication. La logique de contrôle doit gérer les opérations normales, la navigation et divers modes de défaillance.
Le défi de conception consiste à garantir que le drone n’essaie pas de décoller avec une batterie faible, qu’il ne perde pas la connexion sans retourner à la maison, et qu’il atterrisse en toute sécurité en cas d’urgence. Un script linéaire serait difficile à maintenir et sujet aux conditions de course. Un automate d’états fournit une hiérarchie claire des opérations.
Définition des états principaux ⚙️
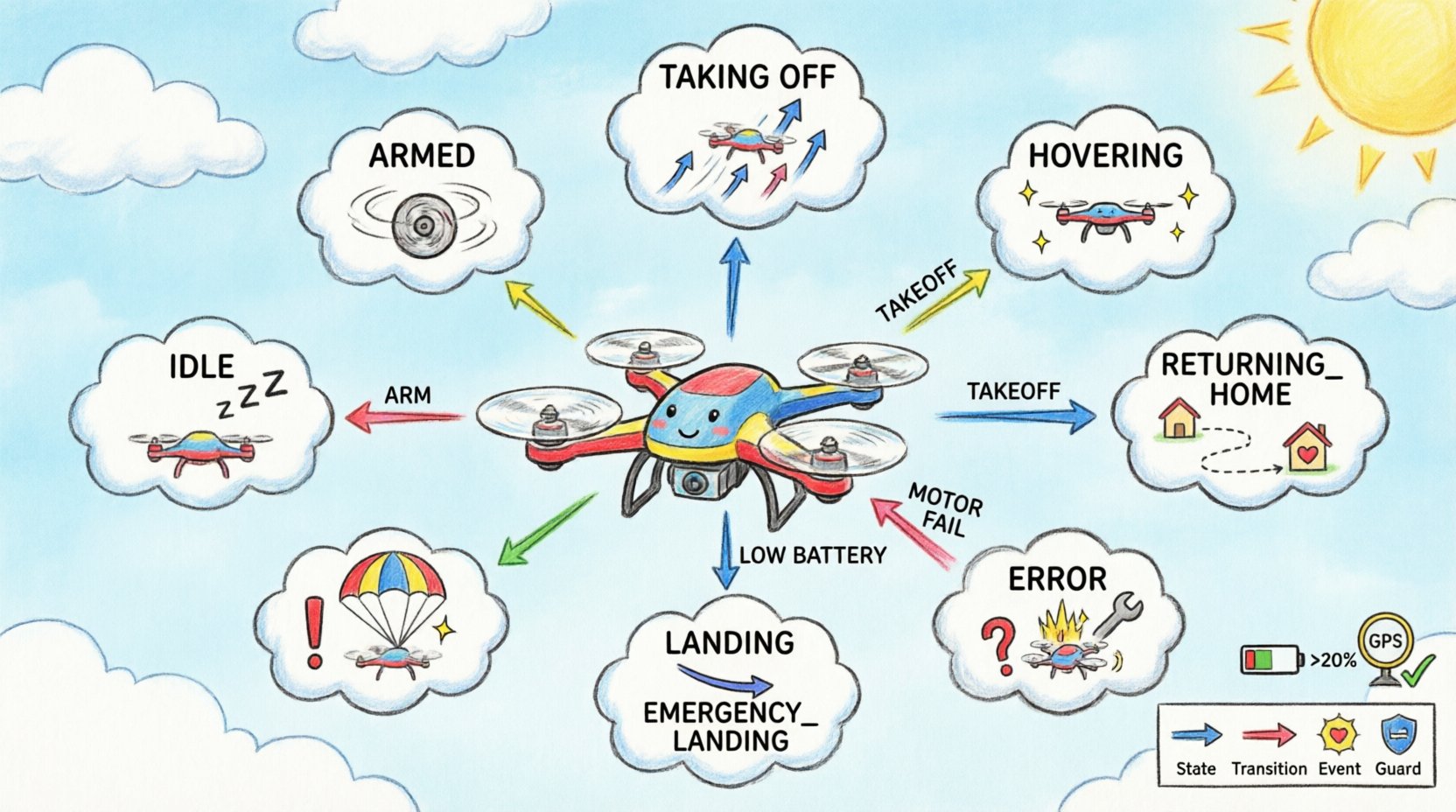
La première étape du processus de conception consiste à identifier les modes d’opération distincts. Pour ce drone, nous définissons les états principaux suivants. Chaque état représente une phase spécifique de la mission.
- IDLE : Le drone est allumé mais non armé. Il attend une commande pour commencer la mission.
- ARMÉ : Les moteurs tournent, et le drone est prêt au décollage. Il n’est pas encore en vol.
- DÉCOLLAGE : Le drone s’élève du sol vers une altitude stable de stationnement en vol.
- STATIONNEMENT EN VOL : Le drone est immobile en vol, en maintenant sa position.
- NAVIGATION : Le drone se déplace activement entre les points de repère pour livrer la charge utile.
- RETOUR À LA BASE : Le drone revient à l’emplacement de lancement en raison d’une batterie faible ou de la perte de signal.
- ATTERRISSEMENT : Le drone descend de l’air vers le sol.
- ATTERRISSEMENT D’URGENCE : Une descente immédiate et forcée due à une panne critique (par exemple, panne du moteur).
- ERREUR : Un état général pour les pannes non traitées ou les réinitialisations du système.
Remarquez que les états tels que INACTIF et ERREUR sont terminaux ou quasi-terminaux. Dès que le système entre dans ERREUR, il ne peut pas passer à NAVIGATION sans une réinitialisation manuelle. Cela empêche le drone de tenter de voler alors qu’il est en état de panne.
Logique de transition et déclencheurs d’événements 📡
Les transitions définissent comment le système passe d’un état à un autre, comme indiqué ci-dessus. Ces déplacements sont déclenchés par des événements tels que les entrées utilisateur, les lectures des capteurs ou des minuteries internes. Le tableau ci-dessous décrit les transitions critiques nécessaires à la logique de contrôle.
| Événement | État source | État cible | Condition de garde |
|---|---|---|---|
| COMMANDER_ARMEMENT | INACTIF | ARMÉ | Batterie > 20 % |
| DÉCOLLAGE TERMINÉ | ARMÉ | Décollage | Capteur d’altitude actif |
| Atteindre le stationnement | Décollage | Stationnement | Altitude = 1,5 m |
| Démarrer la mission | Stationnement | Navigation | Verrouillage GPS = Vrai |
| Batterie faible | Navigation | Retour à la maison | Batterie < 30 % |
| Perte de signal | Navigation | Retour à la maison | Temps > 5 s sans signal |
| Arrivée à la maison | Retour à la maison | Atterrissage | Distance = 0 m |
| Atterrissage | Atterrissage | Inactif | Altitude = 0 m |
| Défaillance du moteur | N’importe lequel | Atterrissage d’urgence | Courant < 0 A |
Observez que l’événement PANNE_MOTEUR a un état source de N’importe quel. Cela est connu comme une transition orthogonale ou une interruption. Quel que soit l’état du drone, qu’il soit INACTIF ou EN_NAVIGATION, une panne critique du moteur force un changement d’état immédiat vers ATERRISSAGE_URGENCE. Cela garantit que la sécurité est prioritaire par rapport à la continuité de la mission.
Conditions de garde et actions 🛑
Les transitions ne sont pas toujours sans condition. Les conditions de garde agissent comme des vérifications de sécurité. Par exemple, un utilisateur ne peut pas lancer une séquence de décollage si la batterie est critique. La condition de garde Batterie > 20 % empêche la transition depuis INACTIF vers ARMÉ.
En outre, les transitions déclenchent souvent des actions. Ces actions sont exécutées au moment de la transition ou pendant qu’un état spécifique est actif.
- Action d’entrée : Code exécuté immédiatement après l’entrée dans un état. Pour l’état EN_DECOLLAGE l’action d’entrée pourrait consister à régler la poussée du moteur à 60 % et à initialiser le régulateur PID d’altitude.
- Action de sortie : Code exécuté immédiatement après la sortie d’un état. Lors de la sortie de EN_SUSPENSION, le système pourrait arrêter le suivi des points de passage afin d’éviter des commandes en conflit.
- Activité en cours : Code exécuté de manière continue pendant qu’un état est actif. Dans l’état NAVIGATION état, un FaireL’activité consiste à lire continuellement les données GPS et à ajuster les vitesses des moteurs pour maintenir la trajectoire de vol.
Considérez l’RETOUR À LA BASEétat. À l’entrée, le drone doit calculer le vecteur de retour vers le point de départ. À la sortie, il doit effacer le vecteur de retour. Cela garantit que si le drone repasse à NAVIGATION (peut-être parce que l’utilisateur a repris le contrôle), la logique de retour n’interfère pas avec la logique de mission.
Conception d’états hiérarchiques (états composites) 🏗️
Les machines à états plates peuvent devenir difficiles à gérer à mesure que la complexité augmente. Les machines à états hiérarchiques permettent aux états d’en contenir des sous-états. Cela est particulièrement utile pour l’NAVIGATIONétat. La navigation n’est pas une seule action ; c’est une collection de comportements.
Nous pouvons définir NAVIGATIONcomme un état composite avec les sous-états internes suivants :
- SUIVI DE POINTS DE ROUTE :Le mode standard où le drone se déplace entre les points.
- ÉVITEMENT DES OBSTACLES :Un état entré lorsqu’un obstacle est détecté.
- STABILISATION :Un état de bas niveau gérant l’équilibre des moteurs pendant les rafales de vent.
Les transitions entre ces sous-états se produisent sans quitter l’état parent NAVIGATIONétat. Par exemple, si un obstacle est détecté, le système passe de SUIVI DE POINTS DE ROUTEà ÉVITEMENT DES OBSTACLES. L’état parent reste actif, préservant ainsi le contexte global de la mission. Une fois l’obstacle éliminé, le système revient à SUIVI DE POINTS DE ROUTE.
Cette structure réduit la redondance. Les actions courantes pour la navigation, telles que la mise à jour des journaux de télémétrie, peuvent être définies au niveau parent au lieu de les répéter dans chaque sous-état. Elle améliore également la clarté en regroupant visuellement les comportements liés.
Considérations relatives à l’implémentation pour les systèmes embarqués 💻
Traduire un diagramme de machine à états en code exécutable exige une attention particulière aux contraintes du matériel embarqué. Le contrôleur de vol du drone fonctionne généralement sur un microcontrôleur doté d’une mémoire RAM et de cycles CPU limités.
- Efficacité mémoire :Évitez de stocker l’historique complet des états. Suivez uniquement l’état actuel. Utilisez une énumération ou un entier pour représenter l’état afin de minimiser l’utilisation de la mémoire.
- Réactivité en temps réel :Les transitions doivent se produire de manière déterministe. Si l’événement ALARME_ATTERRISSEMENTest déclenché, le code ne doit pas attendre la fin d’une tâche longue. Les interruptions doivent être traitées en dehors de la boucle principale d’état ou avec une priorité élevée.
- Consistance des états :Assurez-vous qu’aucun état n’a un comportement indéfini. Chaque événement possible doit avoir une transition définie. Si un événement inattendu se produit, le système doit passer à un état ERREURplutôt que de planter ou de bloquer.
- Journalisation :Implémentez un mécanisme de journalisation des états. Lorsqu’une transition a lieu, enregistrez l’horodatage, l’état source, l’état cible et l’événement dans la mémoire non volatile. Cela est crucial pour l’analyse post-vol.
Par exemple, lors de l’implémentation de l’état DÉCOLLAGEl’état, le code ne doit pas bloquer. Il doit utiliser une minuterie non bloquante pour surveiller l’altitude. Si l’altitude ne s’élève pas dans un délai défini, il doit déclencher un événement d’expiration et passer à ERREUR.
Stratégies de test et de vérification 🧪
Avant le déploiement du drone, la logique de la machine à états doit être vérifiée. La simulation est la méthode la plus rentable. En créant un simulateur logiciel qui imite les entrées des capteurs, les ingénieurs peuvent tester chaque chemin possible dans le diagramme d’états sans risquer de dommages matériels.
Les activités clés de test incluent :
- Test aux limites :Testez les transitions qui reposent sur des seuils spécifiques. Par exemple, vérifiez que la transition vers RETOUR À LA BASEa lieu exactement lorsque la batterie descend en dessous de 30 %, et non à 29 % ou 31 %.
- Couverture des chemins :Assurez-vous que chaque ligne de transition du diagramme est parcourue au moins une fois pendant le test. Cela confirme que la logique de chaque événement est fonctionnelle.
- Test d’interruption : Simulez des événements qui doivent interrompre l’état actuel. Vérifiez que le système quitte correctement NAVIGATION et entre dans ATERRISSAGE_URGENCE même si un calcul long est en cours.
- Test de réinitialisation : Vérifiez que le système peut se rétablir à partir de l’état ERREUR . Peut-il être réinitialisé manuellement à INACTIF sans cycle d’alimentation physique ?
Des outils de vérification de modèle peuvent également être utilisés. Ces outils vérifient mathématiquement que la machine à états ne contient ni blocages (états où aucune transition n’est possible) ni états inaccessibles (états qui ne peuvent pas être atteints à partir de l’état initial).
Péchés courants à éviter ⚠️
Même avec un schéma bien conçu, des erreurs d’implémentation peuvent survenir. Voici les problèmes courants observés dans les systèmes de contrôle de drones.
- Transitions manquantes : Il est facile d’oublier une transition pour un événement spécifique. Par exemple, que se passe-t-il si la batterie tombe en panne pendant que l’on est dans ATERRISSAGE_URGENCE ? Le drone doit toujours exécuter une descente contrôlée ou une logique de protection en chute libre.
- Confusion d’états : Utiliser trop d’états similaires. Par exemple, avoir à la fois EN_VOL_STATIONNAIRE et EN_ATTENTE peut être confus. Combine-les si leurs comportements sont identiques.
- Opérations bloquantes : N’utilisez pas de code bloquant à l’intérieur d’une action d’état. Si une action attend un capteur, toute la machine à états se fige. Utilisez plutôt des rappels asynchrones ou des drapeaux.
- Boucles involontaires : Assurez-vous qu’il n’y a pas de boucles infinies d’états qui consomment des cycles CPU sans effectuer de travail utile. Par exemple, une boucle entre ERREUR et INACTIF sans une commande de réinitialisation provoquera un plantage.
Résumé des avantages 🏆
Concevoir un système de contrôle de drone à l’aide d’un diagramme d’états offre des avantages significatifs par rapport à la programmation procédurale traditionnelle. Il impose une séparation claire des préoccupations, ce qui rend le code plus facile à lire et à déboguer. En définissant explicitement les états et les transitions, les développeurs assurent que le système se comporte de manière prévisible dans toutes les situations.
Cette approche facilite la collaboration entre les équipes matérielles et logicielles. Le diagramme sert de langage commun. Les ingénieurs matériels peuvent voir exactement quand les capteurs sont interrogés, et les ingénieurs logiciels peuvent voir quand les actionneurs sont commandés. Cela simplifie également l’intégration des nouveaux membres de l’équipe, car la logique est visualisée plutôt que cachée dans des structures de code complexes.
En fin de compte, l’investissement dans la conception d’une machine à états robuste se traduit par une fiabilité accrue. Un drone autonome est un système complexe, et la gestion de son comportement exige une méthodologie rigoureuse. En respectant les normes UML et en planifiant soigneusement les transitions, les gardes et les actions, les ingénieurs peuvent construire des systèmes sûrs, maintenables et efficaces. Cette étude de cas démontre que, bien que la logique soit complexe, la structure offre clarté et contrôle sur le comportement autonome.
