











В области встраиваемых систем и автономной робототехники управление сложным поведением требует больше, чем простые условные операторы. Хорошо определенная диаграмма конечного автомата предлагает структурированный подход к моделированию динамического поведения системы. В этом руководстве представлен всесторонний кейс-стади, посвященный проектированию логики управления автономным дроном с использованием принципов диаграммы конечного автомата UML. Мы рассмотрим, как определять состояния, управлять переходами, обрабатывать события и обеспечивать надежную работу в условиях реального мира.
Понимание диаграмм конечных автоматов в UML 📐
Диаграмма конечного автомата, часто называемая диаграммой состояний в UML 2.0, представляет дискретные состояния объекта или системы и переходы между ними. В отличие от статической диаграммы классов, эта модель фиксирует временные характеристики системы. Она особенно полезна для реактивных систем, в которых выходные данные зависят от текущего состояния и поступающих событий.
Ключевые компоненты включают:
- Состояние: Условие или ситуация в течение жизненного цикла объекта, в течение которого он удовлетворяет некоторому условию, выполняет какую-либо деятельность или ожидает события.
- Переход: Связь между двумя состояниями, указывающая, что объекты в первом состоянии перейдут во второе состояние при наступлении определенного события и выполнении определённых условий.
- Событие: Значимое событие, такое как получение сигнала, истечение времени или исключение, которое запускает переход.
- Условие-ограничение: Логическое выражение, которое должно быть истинным для выполнения перехода.
- Действие: Вычисление или действие, выполняемое при входе, выходе или во время перехода.
Использование этой нотации позволяет инженерам визуализировать поток управления, не теряясь в синтаксисе кода. Она служит чертежом для реализации, обеспечивая, что все возможные поведения системы учтены до написания первой строки исполняемого кода.
Кейс-стади: автономный дрон для доставки 🚁
Рассмотрим квадрокоптерный дрон, предназначенный для доставки посылок на последнем этапе в городской среде. Эта система должна работать автономно, но требует человеческого контроля при определённых критических событиях. Дрон оснащен GPS, системой управления батареей, датчиками обнаружения препятствий и модулем связи. Логика управления должна обеспечивать нормальную работу, навигацию и различные режимы отказов.
Проблема проектирования заключается в обеспечении того, чтобы дрон не пытался взлететь при низком уровне заряда батареи, не терял связь без возвращения домой и безопасно садился в аварийной ситуации. Линейный скрипт был бы трудно поддерживать и подвержен условиям гонки. Диаграмма конечного автомата обеспечивает чёткую иерархию операций.
Определение основных состояний ⚙️
Первый шаг в процессе проектирования — выявление различных режимов работы. Для этого дрона мы определяем следующие основные состояния. Каждое состояние представляет собой определённую фазу миссии.
- ОЖИДАНИЕ: Дрон включен, но не готов к взлету. Он ожидает команды для начала миссии.
- ГОТОВ К ВЗЛЕТУ: Двигатели вращаются, дрон готов к взлету. Он еще не в воздухе.
- ВЗЛЕТ: Дрон поднимается с земли до устойчивой высоты зависания.
- ПОВИСАНИЕ: Дрон неподвижен в воздухе, удерживая положение.
- НАВИГАЦИЯ: Дрон активно перемещается между точками маршрута для доставки груза.
- ВОЗВРАЩЕНИЕ ДОМУ: Дрон возвращается к месту старта из-за низкого заряда батареи или потери сигнала.
- ПОСАДКА: Дрон снижается с воздуха на землю.
- АВАРИЙНАЯ ПОСАДКА: Немедленное, принудительное снижение из-за критического сбоя (например, выход из строя двигателя).
- ОШИБКА: Состояние, предназначенное для необработанных неисправностей или сбросов системы.
Обратите внимание, что состояния, такие какПАУЗА и ОШИБКА являются конечными или квазиконечными. Как только система переходит в состояниеОШИБКА, она не может перейти кНАВИГАЦИЯ без ручного сброса. Это предотвращает попытку дрона лететь при неисправном состоянии.
Логика переходов и триггеры событий 📡
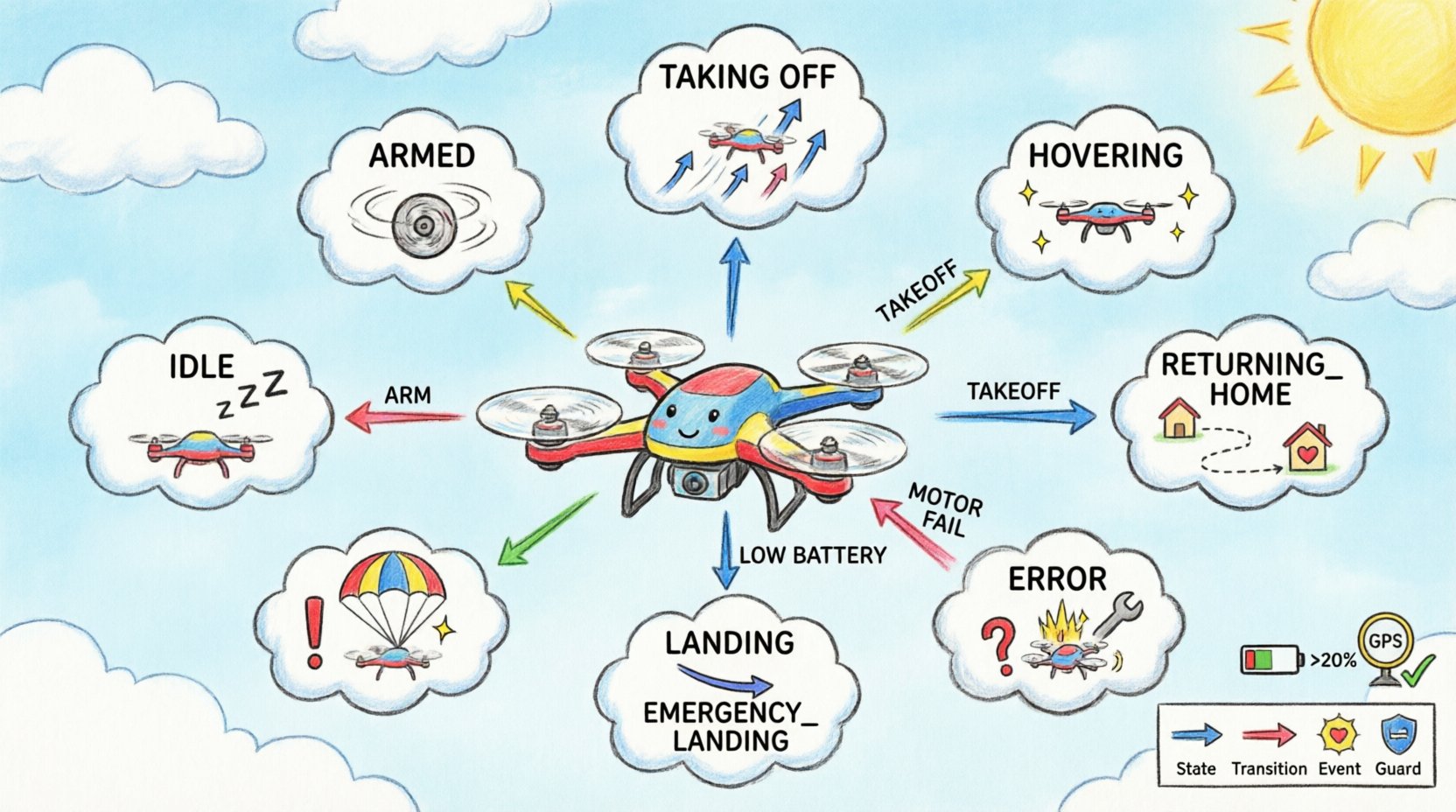
Переходы определяют, как система перемещается между состояниями, перечисленными выше. Эти перемещения запускаются событиями, такими как ввод пользователя, показания датчиков или внутренние таймеры. В таблице ниже описаны критически важные переходы, необходимые для логики управления.
| Событие | Исходное состояние | Целевое состояние | Условие-охрана |
|---|---|---|---|
| КОМАНДА АРМИРОВАНИЯ | ПАУЗА | ГОТОВ К РАБОТЕ | Заряд батареи > 20% |
| ПОЛЕТ НАЧАЛСЯ | ГОТОВ К РАБОТЕ | ВЗЛЕТ | Датчик высоты активен |
| ДОСТИЖЕНИЕ ВИСЕНИЯ | ВЗЛЕТ | ВИСЕНИЕ | Высота = 1,5 м |
| НАЧАЛО МИССИИ | ВИСЕНИЕ | НАВИГАЦИЯ | GPS заблокирован = Да |
| НИЗКИЙ УРОВЕНЬ БАТАРЕИ | НАВИГАЦИЯ | ВОЗВРАЩЕНИЕ ДОМОЙ | Батарея < 30% |
| ПОТЕРЯ СИГНАЛА | НАВИГАЦИЯ | ВОЗВРАЩЕНИЕ ДОМОЙ | Время > 5 с без сигнала |
| ДОСТИЖЕНИЕ ДОМА | ВОЗВРАЩЕНИЕ ДОМОЙ | ПОСАДКА | Расстояние = 0 м |
| КАСАНИЕ ПОВЕРХНОСТИ | ПОСАДКА | ПОКОЙ | Высота = 0 м |
| ОТКАЗ ДВИГАТЕЛЯ | Любой | АВАРИЙНАЯ ПОСАДКА | Ток < 0 А |
Обратите внимание, что событие ОТКАЗ_ДВИГАТЕЛЯ имеет исходное состояние Любое. Это известно как ортогональный переход или прерывание. Независимо от того, находится ли дрон в состоянии ПАУЗА или НАВИГАЦИЯ, критический отказ двигателя немедленно переводит систему в состояние АВАРИЙНАЯ_ПОСАДКА. Это гарантирует, что безопасность имеет приоритет перед непрерывностью выполнения миссии.
Условия-ограничения и действия 🛑
Переходы не всегда безусловны. Условия-ограничения действуют как проверки безопасности. Например, пользователь не может инициировать последовательность взлета, если батарея находится на критическом уровне. Условие-ограничение Батарея > 20% предотвращает переход из состояния ПАУЗА в состояние ГОТОВ.
Кроме того, переходы часто запускают действия. Эти действия выполняются при возникновении перехода или во время нахождения в определенном состоянии.
- Действие входа: Код, выполняемый немедленно при входе в состояние. Для состояния ВЗЛЕТ состояние, действие входа может заключаться в установке тяги двигателя на 60% и инициализации регулятора высоты по ПИД-закону.
- Действие выхода: Код, выполняемый немедленно при выходе из состояния. При выходе из состояния ВИСЕНИЕ, система может остановить следование по точкам маршрута, чтобы избежать конфликтных команд.
- Действие выполнения: Код, выполняемый непрерывно во время нахождения в состоянии. В состоянии НАВИГАЦИИ состояние, а Сделать Деятельность включает непрерывное чтение данных GPS и регулировку скорости двигателей для поддержания траектории полета.
Рассмотрим ВОЗВРАЩЕНИЕ ДОМОЙ состояние. При входе дрон должен вычислить вектор обратно к точке возврата. При выходе он должен очистить вектор возврата. Это гарантирует, что если дрон переключится обратно на НАВИГАЦИИ (возможно, потому что пользователь снова взял управление), логика возврата не будет мешать логике выполнения миссии.
Иерархический дизайн состояний (составные состояния) 🏗️
Плоские машины состояний могут стать неуправляемыми по мере роста сложности. Иерархические машины состояний позволяют состояниям содержать подсостояния. Это особенно полезно для состояния НАВИГАЦИИ состояния. Навигация — это не одно действие; это совокупность поведений.
Мы можем определить НАВИГАЦИИ как составное состояние с следующими внутренними подсостояниями:
- СЛЕЖЕНИЕ ЗА МАРШРУТОМ: Стандартный режим, при котором дрон перемещается между точками.
- ИЗБЕЖАНИЕ СТОЛКНОВЕНИЙ: Состояние, в которое переходит дрон при обнаружении препятствия.
- СТАБИЛИЗАЦИЯ: Низкоуровневое состояние, отвечающее за баланс двигателей во время порывов ветра.
Переходы между этими подсостояниями происходят без выхода из родительского НАВИГАЦИИ состояния. Например, если обнаружено препятствие, система переходит из СЛЕЖЕНИЮ ЗА МАРШРУТОМ в ИЗБЕЖАНИЯ СТОЛКНОВЕНИЙ. Родительское состояние остается активным, сохраняя общую контекст миссии. Как только препятствие устранено, система возвращается к СЛЕЖЕНИЮ ЗА МАРШРУТОМ.
Эта структура уменьшает избыточность. Общие действия для навигации, такие как обновление журналов телеметрии, могут быть определены на родительском уровне, а не повторяться в каждом подсостоянии. Это также улучшает ясность, группируя связанные поведения вместе визуально.
Рассмотрения при реализации для встраиваемых систем 💻
Преобразование диаграммы конечного автомата в исполняемый код требует внимания к ограничениям встраиваемого оборудования. Устройство управления полетом дрона обычно работает на микроконтроллере с ограниченным объемом ОЗУ и циклами процессора.
- Эффективность использования памяти: Избегайте хранения полной истории состояний. Отслеживайте только текущее состояние. Использование перечисления или целого числа для представления состояния минимизирует использование памяти.
- Реагирование в реальном времени: Переходы должны происходить детерминированно. Если АВАРИЙНАЯ ПОСАДКА событие запускается, код не должен ждать завершения длительной задачи. Прерывания должны обрабатываться вне основного цикла состояний или с высоким приоритетом.
- Согласованность состояний: Убедитесь, что ни одно состояние не имеет неопределенного поведения. Каждое возможное событие должно иметь определенный переход. Если происходит неожиданное событие, система должна перейти в состояние ОШИБКА состояние, а не аварийно завершаться или зависать.
- Журналирование: Реализуйте механизм журналирования состояний. При возникновении перехода запишите метку времени, исходное состояние, целевое состояние и событие в энергонезависимую память. Это критически важно для анализа после полета.
Например, при реализации состояния ВЗЛЕТ состояние код не должен блокироваться. Он должен использовать неблокирующий таймер для контроля высоты. Если высота не увеличивается в течение заданного времени, должен сработать событие таймаута и произойдет переход в состояние ОШИБКА.
Стратегии тестирования и верификации 🧪
Перед развертыванием дрона логика конечного автомата должна быть проверена. Симуляция — самый экономически эффективный метод. Создав программный симулятор, имитирующий входные данные датчиков, инженеры могут протестировать каждый возможный путь через диаграмму состояний, не рискуя оборудованием.
Ключевые тестовые мероприятия включают:
- Тестирование границ: Тестирование переходов, зависящих от конкретных пороговых значений. Например, убедитесь, что переход в состояние ВОЗВРАЩЕНИЕ ДОМОЙ происходит ровно тогда, когда уровень заряда батареи падает ниже 30%, а не при 29% или 31%.
- Покрытие путей: Убедитесь, что каждый переход на диаграмме проходится хотя бы один раз во время тестирования. Это подтверждает, что логика для каждого события работает корректно.
- Тестирование прерываний: Имитируйте события, которые должны прервать текущее состояние. Убедитесь, что система правильно выходит из него НАВИГАЦИЯ и переходит в АВАРИЙНАЯ ПОСАДКА даже если выполняется длительный расчет.
- Тестирование сброса: Убедитесь, что система может восстановиться из состояния ОШИБКА состояния. Можно ли вручную сбросить его в состояние ПАУЗА без физического цикла питания?
Можно также использовать инструменты проверки моделей. Эти инструменты математически проверяют, что автомат состояний не содержит взаимоблокировок (состояний, из которых невозможно выполнить переходы) или недостижимых состояний (состояний, которые нельзя войти из начального состояния).
Распространённые ошибки, которые следует избегать ⚠️
Даже при хорошо спроектированной диаграмме могут возникать ошибки реализации. Ниже перечислены распространённые проблемы, наблюдаемые в системах управления дронами.
- Отсутствующие переходы: Легко забыть о переходе для конкретного события. Например, что произойдёт, если аккумулятор разрядится во время нахождения в состоянии АВАРИЙНАЯ ПОСАДКА? Дрон должен продолжать выполнять управляемый спуск или логику защиты от свободного падения.
- Путаница в состояниях: Использование слишком многих похожих состояний. Например, наличие как состояния ВИСЕНИЕ так и ОЖИДАНИЕ может быть запутывающим. Объедините их, если их поведение идентично.
- Блокирующие операции: Не используйте блокирующий код внутри действия состояния. Если действие ожидает датчик, весь автомат состояний замораживается. Вместо этого используйте асинхронные обратные вызовы или флаги.
- Непреднамеренные циклы: Убедитесь, что нет бесконечных циклов состояний, которые потребляют циклы процессора, не выполняя полезной работы. Например, цикл между ОШИБКА и ГОТОВ без команды сброса приведет к сбою.
Краткое описание преимуществ 🏆
Проектирование системы управления дроном с использованием диаграммы состояний предоставляет значительные преимущества по сравнению с традиционным процедурным программированием. Это обеспечивает четкое разделение обязанностей, делая код более читаемым и удобным для отладки. Явно определяя состояния и переходы, разработчики гарантируют, что система будет вести себя предсказуемо во всех сценариях.
Этот подход способствует сотрудничеству между командами аппаратного и программного обеспечения. Диаграмма служит общим языком. Инженеры по аппаратному обеспечению могут точно видеть, когда производится опрос датчиков, а инженеры по программному обеспечению — когда подаются команды исполнительным механизмам. Это также упрощает ввод новых членов команды, поскольку логика визуализирована, а не скрыта в сложных структурах кода.
В конечном счете, вложение усилий в проектирование надежной машины состояний оправдывается надежностью. Автономный дрон — это сложная система, и управление его поведением требует дисциплинированного подхода. Соблюдая стандарты UML и тщательно планируя переходы, условия и действия, инженеры могут создавать системы, которые безопасны, поддерживаемы и эффективны. Этот кейс-стади демонстрирует, что, несмотря на сложность логики, структура обеспечивает ясность и контроль над автономным поведением.
